

26. Синтез линейных систем автоматического регулирования. Последовательные, параллельные корректирующие устройства, корректирующие обратные связи (жесткие и гибкие).
Корректирующие устройства могут включаться последовательно и параллельно элементам прямой цепи и встречно-параллельно, т. е. в виде корректирующих обратных связей.
Последовательное корректирующее устройство включают непосредственно после элемента сравнения или после каскадов предварительного усиления.
Параллельное корректирующее устройство – используется гораздо реже, но в некоторых случаях позволяет достаточно простыми способами достичь эффективного решения.
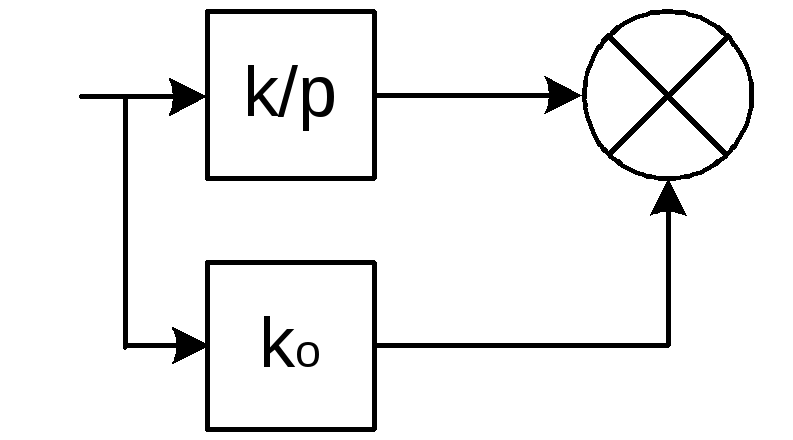 W(p)=k/p+k0=k(τp+1)/p;
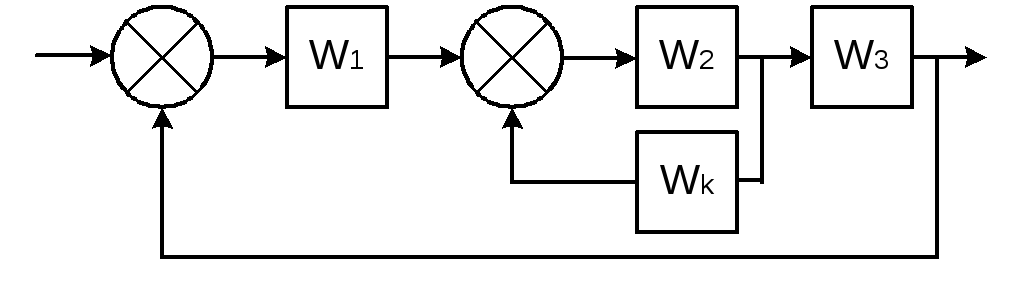
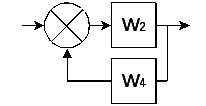
Встречно – параллельные корректирующие
устройства охватывает исполнительный
элемент и конечные каскады усилителей
мощности.
W(p)=k/p+k0=k(τp+1)/p;
Встречно – параллельные корректирующие
устройства охватывает исполнительный
элемент и конечные каскады усилителей
мощности.
![]()
![]()
![]() Подберем
таким образом, чтобы в рабочем диапазоне
частотW2(jw)*Wk(jw)>>1;Wэ=1/Wk;
Свойства цепи со встречно – параллельным
корректирующим устройством будут
определяться только свойствами самого
корректирующего устройства. Рекомендуется
охватывать наиболее неблагоприятные
участки.
Подберем
таким образом, чтобы в рабочем диапазоне
частотW2(jw)*Wk(jw)>>1;Wэ=1/Wk;
Свойства цепи со встречно – параллельным
корректирующим устройством будут
определяться только свойствами самого
корректирующего устройства. Рекомендуется
охватывать наиболее неблагоприятные
участки.
Корректирующие обратные связиделятся нажесткиеигибкие.
Жесткие образуются в безинерционном и инерционном звеньях.; W(p)=k0; W(p)=k0/(T0p+1)
Жесткие обратные связи действуют как в переходных так и в установившемся режиме, поэтому могут использоваться для коррекции точностных показателей и динамических свойств системы.
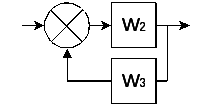
Гибкие обратные связи образуются идеальным и реальным дифференцирующим звеньями.
W(p)=k0p; W(p)=k0p/(T0p+1); Действуют только в переходных режимах, поэтому используются для коррекции динамических свойств системы.
![]()
![]()
![]()
![]()
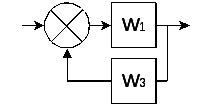

![]() гдеkэ
= 1/k0;
Tэ
= 1/kk0.
гдеkэ
= 1/k0;
Tэ
= 1/kk0.
![]() гдеkэ
= k/(1
+ kT0);
Tэ
= T0/(1
+ kT0).
гдеkэ
= k/(1
+ kT0);
Tэ
= T0/(1
+ kT0).
![]() гдеkэ
= k/(1
+ kk0);
Tэ
= T/(1
+ kk0)
гдеkэ
= k/(1
+ kk0);
Tэ
= T/(1
+ kk0)
![]() где T1
и T2
находятся из системы уравнений
где T1
и T2
находятся из системы уравнений
TT0 = T1T2;
T + T0 + kT0 = T1 + T2,
27. Частотные методы синтеза корректирующих устройств. Синтез желаемой лачх. Синтез последовательных и встречно-параллельных корректирующих устройств.
Начнем с того, что для синтеза любого КУ сначала надо набросать желаемую ЛАЧХ системы.
Ее мутят, опираясь на следующие рекомендации:
Желаемая ЛАЧХ в возможно большем диапазоне частот должна совпадать с исходной.
Область НЧ формируется исходя из требований к точности системы (статическая, cкоростная ошибки и все такое).
Область СЧ создаем исходя из требований в отношении качества системы (в частности учитывая новую частоту среза и границы области СЧ).

Наклон желаемой ЛАЧХ вблизи частоты среза должен составлять -20Дб/Дек
Так как область ВЧ не особо влияет на работу системы, то там ЛАЧХ проводят с наклоном -40/-60 Дб/Дек (желательно, как в исходной системе).
Область НЧ соединяется с областью СЧ отрезком с наклоном -40 Дб/Дек
Синтез последовательного КУ:
ЛАЧХ КУ находится как разность желаемой и исходной ЛАЧХ
По ЛАЧХ КУ ищем его передатку
По передатке находим нужную схему
Синтез встречно параллельного КУ:
ЛАЧХ участка, охваченного КУ (вместе с самим КУ) находим вычитая из исходной ЛАЧХ желаемую.
Строим ЛАЧХ охватываемых звеньев.
ЛАЧХ КУ найдем как разницу ЛАЧХ участка, охваченного КУ и ЛАЧХ охватываемых звеньев.