

3.4. Синтез схемы параллельного корректирующего устройства
Передаточная функция параллельного корректирующего устройства имеет следующий вид:
.![]()
Данной передаточной функции соответствует следующая схема параллельного корректирующего устройства (рис. 12):
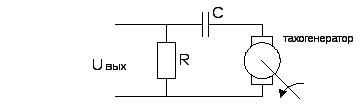
рис. 12
В данной схеме передаточная функция звена RC равна:
K(p) = Tp/(1+Tp),
а передаточная функция тахогенератора равна:
Kтг(p) = kTp.
Вывод:
Полученные фактические характеристики скорректированной системы близки к желаемым характеристикам. Следовательно, коррекция была проведена верно и корректирующее устройство, соответствующее полученным характеристикам, при параллельном включении его в систему обеспечит устойчивость исходной системы и соответствие качественных показателей регулирования требуемым значениям.
3.5. Построение кривой переходного процесса динамики работы следящей системы
Кривая переходного процесса строится по таблице:
|
t, c |
h(t) |
|
0,02 |
0,14 |
|
0,03 |
0,28 |
|
0,05 |
0,59 |
|
0,06 |
0,72 |
|
0,07 |
0,84 |
|
0,09 |
1,02 |
|
0,1 |
1,09 |
|
0,11 |
1,13 |
|
0,14 |
1,2 |
|
0,2 |
1,17 |
|
0,24 |
1,13 |
|
0,27 |
1,1 |
|
0,3 |
1,7 |
|
0,35 |
1,05 |
|
0,4 |
1,036 |
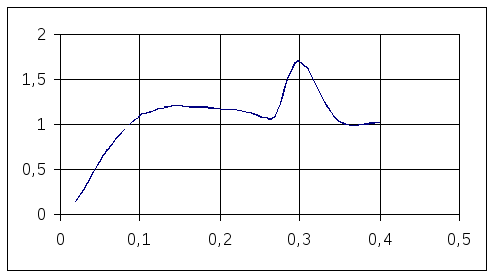 Рис.13.
Рис.13.
3.2.5.1. Определение качественных показателей динамики работы следящей системы.
По графику переходного процесса определяются показатели качества регулирования:
tрег = 0.85c; max = 70%; = 0,3
max = (ymax – yуст)/ yуст*100% = (1,70 - 1)*100% = 70%
3.6. Построение полной схемы следящей системы
Схема с последовательным корректирующим устройством изображена на рис. 14.
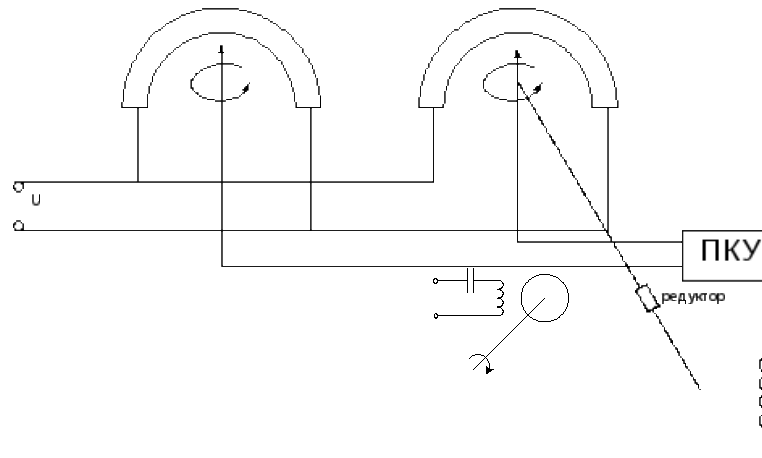 рис.
14
рис.
14
Схема с параллельным корректирующим устройством изображена на рис. 15
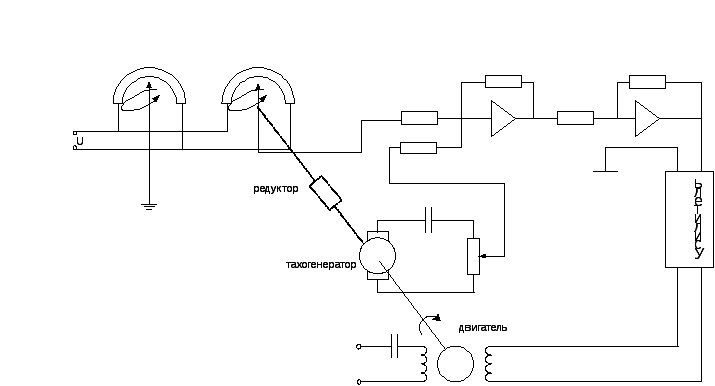
рис. 15
4. Список использованной литературы
Босин Б.И. “Линейные маломощные следящие системы. Учебное пособие по курсовому проектированию”.
Денисов В.В. “Идентификация динамики элементов САУ” .
Воронов А.А. “Основы теории автоматического регулирования и управления”.