

Глава 3. Синтез сау
В данной главе рассмотрен синтез регулятора основного контура по методу рекуррентных целевых неравенств.
Метод рекуррентных целевых неравенств
Рассмотрим дискретную модель, заданную в пространстве состояний:
|
(3.1.1) |
где
 – вектор состояний дискретного объекта,
– вектор состояний дискретного объекта,
 – управление в моменты времени k,
– управление в моменты времени k,
 ,
,
 ,
,
 ,
,
 – параметры модели в пространстве
состояний,
– параметры модели в пространстве
состояний,
 – значения на выходе в моменты времени
k.
– значения на выходе в моменты времени
k.
Необходимо определить параметры
 линейных законов управления с обратной
связью:
линейных законов управления с обратной
связью:
|
, |
(3.1.2) |

обеспечивающие выполнение целевых условий:
|
, |
(3.1.3) |

где
 – вектор подстраиваемых параметров,
– вектор подстраиваемых параметров,
 – целевые условия.
– целевые условия.
Произведём подстановку соотношения (3.1.2) в (3.3.1), получим:
|
(3.1.4) |

После проведения элементарных преобразований в (3.1.4) можно получить:
|
(3.1.5) |

где
 – матрица замкнутой системы.
– матрица замкнутой системы.
Тогда целевые условия (3.1.3) примут вид:
|
. |
(3.1.6) |

Определив
множество допустимых значений, выберем
конкретное значение
 :
:
|
(3.1.7) |

где
 – величина шага,
– величина шага,
 – направление.
– направление.
Из соотношения (3.1.6) можно получить оценки для вектора подстраиваемых параметров:
|
(3.1.8) |

Исходя из соотношений (3.1.7), (3.1.8) можно дать оценку для вектора направления :
|
(3.1.9) |
Таким образом, вектор можно определить из следующего соотношения:
|
(3.1.10) |

Синтез регулятора основного контура по методу рекуррентных целевых неравенств.
Рассмотрим синтез регулятора на примере дискретной модели ЭЭО в системе «шина», параметры которой представлены в (3.2.1):
|
(3.2.1) |
Необходимо определить параметры
 линейных законов управления с обратной
связью:
линейных законов управления с обратной
связью:
|
. |
(3.2.2) |
В качестве начальных значений вектора подстраиваемых параметров выбраны значения при нулевых начальных условиях и нулевом задающем воздействии. В качестве целевого условия можно задать любое, близкое к нулю число.
Исследуем рассматриваемую систему с регулятором. График переходного процесса имеет вид:
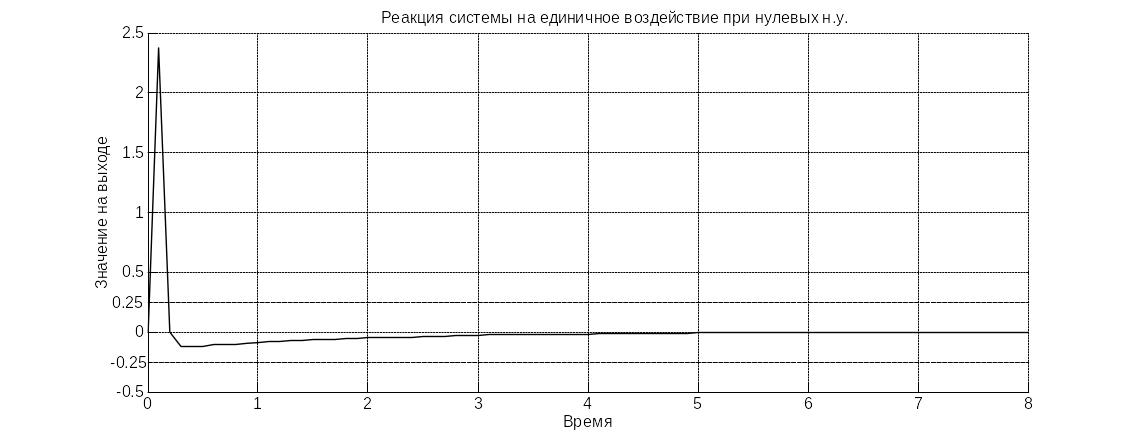
Рис. 3.2. График переходного процесса для системы с регулятором.
Из рис. 3.2 видно, что после ступенчатого воздействия система стабилизируется.
Заключение
В данной работе представлены математические модели и методы для анализа и синтеза систем автоматического управления электроэнергетическими системами.
Были исследованы позиционная и полная модели электроэнергетической системы в случае объединения двух ЭС, мощность одной из которых принята бесконечной и в случае объединения двух ЭС равной мощности. ЭЭО было исследовано на устойчивость, управляемость и проведён анализ переходных процессов.
Для позиционной модели в системе «шина» был синтезирован регулятор основного контура по методу рекуррентных целевых неравенств.
Проведенные исследования сформировали комплексное представление о ЭЭО, и их свойствах, позволили установить некоторые качественно важные особенности этих систем и систем управления ЭЭО. Управление электроэнергетическими система является нетривиальной задачей, которая может быть решена множеством способов, каждый из которых будет иметь свои особенности, применительно к данной системе.