

3.3. Графическое решение задачи линейного программирования.
Графический способ решения задачи линейного программирования целесообразно использовать для:
решения задач с двумя переменными, когда ограничения выражены неравенствами;
решение задач со многими переменными при условии, что в их канонической записи содержится не более двух переменных.
Запишем задачу линейного программирования с двумя переменными :
целевая функция:
![]() (3.34)
(3.34)
ограничения:
 (3.35)
(3.35)
![]() (3.36)
(3.36)
Каждое из неравенств
(3.35) – (3.36) системы ограничений задачи
геометрически определяет полуплоскость
соответственно с граничными прямыми
![]() ;
;![]() ;
;
![]() ;
;![]() .
В том случае, если система неравенств
(3.35) – (3.36) совместна, область её решений
есть множество точек, принадлежащих
всем указанным полуплоскостям. Так как
множество точек пересечения данных
полуплоскостей – выпуклое, то областью
допустимых решений является выпуклое
множество, которое называется
многоугольником решений. Стороны этого
многоугольника лежат на прямых, уравнения
которых получаются из исходной системы
ограничений с заменой знаков неравенств
на знаки равенств.
.
В том случае, если система неравенств
(3.35) – (3.36) совместна, область её решений
есть множество точек, принадлежащих
всем указанным полуплоскостям. Так как
множество точек пересечения данных
полуплоскостей – выпуклое, то областью
допустимых решений является выпуклое
множество, которое называется
многоугольником решений. Стороны этого
многоугольника лежат на прямых, уравнения
которых получаются из исходной системы
ограничений с заменой знаков неравенств
на знаки равенств.
Областью допустимых решений системы неравенств (3.35) – (3.36) может быть:
выпуклый многоугольник;
выпуклая многоугольная неограниченная область;
пустая область;
луч;
отрезок;
единственная точка.
Целевая функция
(3.34) определяет на плоскости семейство
параллельных прямых, каждой из которых
соответствует определённое значение
![]() .
.
Вектор
![]() с координатами
с координатами![]() и
и ![]() ,
перпендикулярный этим прямым, указывает
направление наискорейшего возрастания
,
перпендикулярный этим прямым, указывает
направление наискорейшего возрастания
![]() ,
а противоположный вектор – направление
убывания
,
а противоположный вектор – направление
убывания![]() .
.
Если в одной и той
же системе координат изобразить область
допустимых решений системы неравенств
(3.35) – (3.36) и семейство параллельных
прямых (3.34), то задача определения
максимума функции
![]() сведётся к нахождению в допустимой
области точки, через которую проходит
прямая из семейства
сведётся к нахождению в допустимой
области точки, через которую проходит
прямая из семейства![]() ,
и которая соответствует наибольшему
значению параметра
,
и которая соответствует наибольшему
значению параметра![]() .
.
Эта точка существует тогда, когда многоугольник решений не пуст и на нем целевая функция ограничена сверху. При указанных условиях в одной из вершин многоугольника решений целевая функция принимает максимальное значение.
Для определения
данной вершины построим линию уровня
![]() ,
проходящую через начало координат и
перпендикулярную вектору
,
проходящую через начало координат и
перпендикулярную вектору![]() ,
и буде передвигать её в направлении
вектора
,
и буде передвигать её в направлении
вектора![]() до тех пор, пока она не коснётся последней
крайней (угловой) точки многоугольника
решений. координаты указанной точки и
определяют оптимальный план данной
задачи.
до тех пор, пока она не коснётся последней
крайней (угловой) точки многоугольника
решений. координаты указанной точки и
определяют оптимальный план данной
задачи.
Заканчивая рассмотрение геометрической интерпретации задачи (3.34) – (3.36), отмечу, что при нахождении её решения могут встретится случаи, изображенные на рис. 3.1 – 3.4.
Рис. 3.1 характеризует такой случай, когда целевая функция принимает максимальное значение в единственной точке А. Из рис. 3.2 видно, что максимальное значение целевая функция принимает в любой точке отрезка АВ.
0
0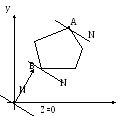
![]()
![]() N
N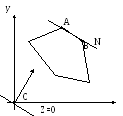
Рис. 3.1. Оптимум Рис. 3.2. Оптимум Функция Z Функция Z достижим в точке А достигается в любой точке [AB]
0
0

![]()
Рис. 3.3. Оптимум Рис. 3.4. Область допустимых
Функция Z недостижим решений – пустая область
На рис. 3.3 изображен
случай, когда максимум недостижим, а на
рис. 3.4 – случай, когда система ограничений
задачи несовместна. Отмечу, что нахождение
минимального значения Z
при данной системе ограничений отличается
от нахождения её максимального значения
при тех же ограничениях лишь тем, что
линия уровня Z
передвигается не в направлении вектора
![]() ,
а в противоположном направлении. Таким
образом, отмеченные выше случаи,
встречающиеся при нахождении максимального
значения целевой функции, имеют место
и при определении её минимального
значения.
,
а в противоположном направлении. Таким
образом, отмеченные выше случаи,
встречающиеся при нахождении максимального
значения целевой функции, имеют место
и при определении её минимального
значения.
Для практического решения задачи линейного программирования (3.34) – (3.36) на основе её геометрической интерпретации необходимо следующее:
1. Построить прямые, уравнения которых получается в результате замены в ограничениях (3.34) – (3.36) знаков неравенств на знаки равенств.
2. Найти полуплоскости, определяемые каждым из ограничений задачи.
3. Определить многоугольник решений.
4. Построить вектор
![]() .
.
5. Построить прямую
![]() ,
проходящую через начало координат и
перпендикулярную вектору
,
проходящую через начало координат и
перпендикулярную вектору![]() .
.
6. Передвигать
прямую
![]() в направлении вектора
в направлении вектора![]() ,
в результате чего-либо находят точку
(точки), в которой целевая функция
принимает максимальное значение, либо
устанавливают неограниченность функции
в этой точке.
,
в результате чего-либо находят точку
(точки), в которой целевая функция
принимает максимальное значение, либо
устанавливают неограниченность функции
в этой точке.
Симплекс-метод.
Для начала работы
требуется, чтобы заданная система
ограничений выражалась равенствами,
причём в этой системе ограничений должны
быть выделены базисные неизвестные.
Решение задачи симплекс-методом
распадается на ряд шагов. На каждом шаге
от данного базиса Б переходят к другому,
новому базису Б1
с таим расчётом, чтобы значение функции
Z
уменьшилось, т.е.
![]() .
Для перехода к новому базису из старого
базиса удаляется одна из переменных и
вместо нее вводится другая из числа
свободных. После конечного числа шагов
находится некоторый базис Б(k),
для которого
.
Для перехода к новому базису из старого
базиса удаляется одна из переменных и
вместо нее вводится другая из числа
свободных. После конечного числа шагов
находится некоторый базис Б(k),
для которого
![]() есть искомый минимум для линейной
функцииZ,
а соответствующее базисное решение
является оптимальным либо выясняется,
что задача не имеет решения.
есть искомый минимум для линейной
функцииZ,
а соответствующее базисное решение
является оптимальным либо выясняется,
что задача не имеет решения.