

1.6. Способы контакта преобразователя с изделием
УЗ-волны хорошо отражаются от тончайших воздушных зазоров, поэтому для передачи УЗ-колебаний от преобразователя к изделию промежуток между ними заполняют слоем жидкости. Существует несколько способов передачи ультразвука.
Контактный способ. Преобразователь прижимают к поверхности изделия, предварительно смазанной жидкостью (например, маслом). В некоторых случаях слой жидкости заменяют или дополняют эластичным материалом. Контактный смазочный материал должен хорошо смачивать контролируемый материал и поверхность преобразователя, создавать тонкий равномерный слой и не стекать слишком быстро с поверхности.
Выбирая контактный смазочный материал, следует помнить, что вода обладает недостаточной вязкостью и смачиваемостыо и может вызвать коррозию изделия. Поэтому в воду надо добавлять поверхностно-активные вещества, улучшающие ее смачивающую способность, и вещества, уменьшающие ее способность вызывать коррозию.
Щелевой (или менисковый) способ. Между преобразователем и изделием специальным ограничителем создается зазор (его толщина примерно равна длине волны ультразвука), в который непрерывно подают контактную жидкость Этот способ может быть использован, если поверхность контролируемого изделия расположена вертикально или имеет переменную кривизну.
Иммерсионный способ. Между преобразователем и изделием создается толстый слой жидкости путем помещения изделия в ванну с водой или образования локальной жидкостной ванны. Этот способ имеет ряд преимуществ по сравнению с контактным: высокую стабильность излучения и приема УЗК за счет постоянства акустической связи между преобразователем и изделием; отсутствие изнашивания преобразователей, так как при контроле между преобразователем и изделием нет трения; возможность контроля изделий с грубообработанной или защищенной покрытием поверхностью без предварительной подготовки.
Бесконтактные способы. Кроме указанных, существуют способы возбуждения и приема упругих колебаний через слой воздуха или с помощью электромагнитного поля, возбуждаемого датчиком,— бесконтактные. В этом случае специальная контактная среда не требуется.
Глава 2. Преобразователи
2.1. Классификация преобразователей
Ультразвуковой пьезоэлектрический преобразователь (ПЭП) является важнейшим элементом, определяющим достоверность УЗ-контроля. Этот сложный электроакустический прибор должен обеспечивать формирование УЗ-пучка в самых разных по конфигурации контролируемых элементах.
По способам ввода УЗ-колебаний ПЭП подразделяют на контактные, щелевые, иммерсионные и бесконтактные.
В
контактных ПЭП толщина контактного
слоя
![]() ,
в щелевых
,
в щелевых![]() ,
а в иммерсионных
,
а в иммерсионных![]() ,
гдеС
— скорость
распространения УЗ-колебаний в контактной
жидкости;
,
гдеС
— скорость
распространения УЗ-колебаний в контактной
жидкости;
![]() —
длительность зондирующего импульса.
—
длительность зондирующего импульса.
Контактные преобразователи нашли наибольшее применение в промышленности. Их основным недостатком является нестабильность акустического контакта в процессе сканирования преобразователя.
При контроле некоторых деталей и конструкций, когда не допускается нанесение контактной жидкости перед ПЭП (например, при обнаружении поверхностных трещин), используют щелевые (менисковые) преобразователи.
Иммерсионный ввод УЗ-колебаний чаще всего используют при автоматизированном контроле изделий небольшого размера или изделий простой геометрической формы, например труб небольшого диаметра. Иногда преобразователи с иммерсионной локальной ванной применяют при контроле по грубообработанным поверхностям.
Особую группу составляют бесконтактные ПЭП, которые возбуждают упругие колебания в металле за счет взаимодействия переменного электрического и магнитного полей.
По направлению ввода упругих колебаний в исследуемый объект ПЭП бывают прямые, наклонные, комбинированные.
По конструктивному исполнению и способу подключения к электронной части дефектоскопа пьезоэлектрические преобразователи подразделяют на совмещенные, раздельно-совмещенные (PC), раздельные.
В совмещенных ПЭП пьезоэлемент выполняет роль излучателя и приемника УЗ-колебаний.
В PC-преобразователях функции излучателя и приемника разделены, а конструктивно они выполнены в одном корпусе.
В зависимости от формы рабочей поверхности или пьезоэлемента ПЭП могут быть плоскими или неплоскими. Среди неплоских широкое распространение получили фокусирующие ПЭП.
Тип ПЭП определяют сочетанием перечисленных выше признаков:
контактные прямые совмещенные;
иммерсионные прямые совмещенные;
контактно-иммерсионные прямые;
контактные прямые PC с акустической задержкой;
контактные наклонные совмещенные с акустической задержкой;
контактные наклонные PC с акустической задержкой.
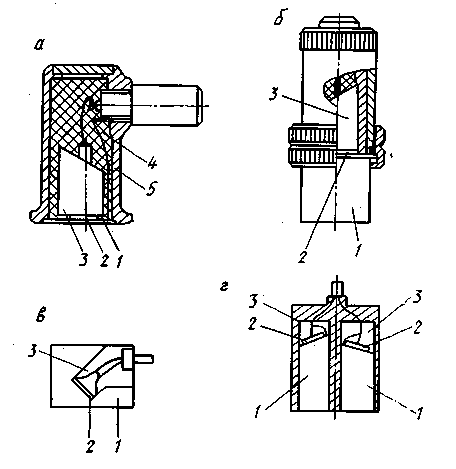
Рис. 2.1. Преобразователи:
а — прямой совмещенный контактный (/ — протектор; 2 — пьезопластина; 3 — демпфер; 4 — заливочная масса; 5 — корпус); б — прямой совмещенный с акустической задержкой (7 — твердая задержка; 2 — пьезопластина; 3 — демпфер); в — наклонный совмещенный с акустической задержкой (У —призма; 2 — пьезопластина; 3 — демпфер); г — наклонный раздельно-совмещенный с акустической задержкой (/ — призма; 2 — пьезопластина; 3 — демпфер).
На рис. 2.1 показаны конструкции основных типов преобразователей. Каждому типу ПЭП соответствует определенное условное обозначение, структура которого

Рис. 2.2. Структура условного обозначения ПЭП.
приведена на рис. 2.2. Например, П121-2,5-35-001 ГОСТ 26266—84, т. е. ПЭП контактный, наклонный, совмещенный, с номинальной частотой 2,5 МГц, углом ввода 35°, порядковый номер модели 001.
Примеры
условного обозначения специальной
дополнительной характеристики ПЭП:
Т120
— максимальная
температура контролируемого объекта—120
![]() ;К.Н
— керамическая
защита, нормальное исполнение корпуса;
К20
— керамическая
защита, диаметр пьезоэлемента 20 мм; М
— малогабаритное
исполнение корпуса; ММ
—- Миниатюрное
исполнение корпуса.
;К.Н
— керамическая
защита, нормальное исполнение корпуса;
К20
— керамическая
защита, диаметр пьезоэлемента 20 мм; М
— малогабаритное
исполнение корпуса; ММ
—- Миниатюрное
исполнение корпуса.
Цвет маркировки условного обозначения устанавливают зависимости от номинальных значений частоты f:
f<9 МГц — серый, белый цвет;
f=1,0; 1,25 МГц — красный цвет;
f=1,5; 1,8 МГц — оранжевый цвет;
f=2,0; 2,5; 3,0 МГц —синий цвет;
f=4,0;; 5,0; 6,0 МГц —зеленый цвет;
f=8,0; 10,0; 12,5 МГц — коричневый цвет;
f=15,0 МГц — желтый цвет.
В условных обозначениях ПЭП с переменной частотой или углом ввода вместо номинальных значений этих параметров указывают граничные значения диапазона их изменений.
Для ПЭП, имеющих несколько номинальных частот, указывают все значения этих частот.