

2.5. Электромагнитные ультразвуковые преобразователи
Создание контактной связи ультразвуковых колебаний с объектом контроля через жидкую среду является одним из главных факторов, сдерживающих широкое применение УЗ-контроля в производстве. Поэтому в настоящее время ведутся исследования по разработке бесконтактных способов возбуждения и приема ультразвуковых колебаний. Наибольшие успехи достигнуты при возбуждении и приеме ультразвуковых колебаний в металлах с помощью электромагнитного поля. Разработаны специальные электромагнитно-акустические преобразователи (ЭМА), принцип действия которых основан на превращении электромагнитных колебаний в акустические непосредственно поверхностью металла, находящегося в зоне преобразователя.
ЭМА-преобразователь работает следующим образом (рис. 2.9). При пропускании через обмотку 1 импульса тока ультразвуковой частоты на поверхности металла 2 возникает вихревой ток 3. Взаимодействуя с магнитным полем постоянного магнита 5, вихревой ток создает силу (силу Лоренца), которая заставляет колебаться с ультразвуковой частотой поверхность металла 2. Последняя тем самым превращается в излучатель ультразвука. Отразившиеся от противоположной поверхности металла 4 ультразвуковые колебания через небольшой
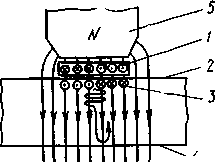
Рис. 2.9. Схема ЭМА-преобразователя.
промежуток времени возвращаются к поверхности металла 2 и заставляют ее колебаться. Поскольку поверхность 2 находится в постоянном магнитном поле, ее колебания приводят к возникновению переменного тока, который трансформируется в высокочастотную обмотку /. Кроме силы Лоренца, на основе взаимодействия статического магнитного поля с динамическим магнитным полем, созданным импульсом возбуждения, возникают ультразвуковые колебания, связанные с магнитострикцией. Происходит наложение обоих процессов. При контроле ферромагнитных сталей в зависимости от способа возбуждения и конструкции датчика процесс преобразования ультразвуковых колебаний определяется либо силами Лоренца, либо магнитострикцией.
Как следует из рассмотренного выше, в ЭМА-преобразователях излучателем и приемником ультразвуковых колебаний становится сама поверхность металла, расположенная в зоне действия обмотки преобразователя. Поэтому в зазоре между ЭМА-преобразователем и поверхностью металла существует только электромагнитное поле, следовательно, жидкость для акустического контакта не нужна. ЭМА-преобразователи могут возбуждать ультразвуковые колебания как перпендикулярно к поверхности изделия, так и под заданным углом, что позволяет реализовать методики контроля, разработанные ранее для пьезопреобразователей.
В зависимости от конструкции ЭМА-преобразователей возбуждаются либо продольные, либо поперечные волны с заданным направлением плоскости поляризации. Это открывает новые возможности в практике неразрушающего контроля, так как использование линейно-поляризованных поперечных ультразвуковых волн позволяет получить дополнительную информацию о структуре, остаточных напряжениях и некоторых других характеристиках материала.
С помощью ЭМА-преобразователей возможно также бесконтактное возбуждение рассмотренных выше волн Лэмба, Рэлея и горизонтально поляризованных поперечных (SH) волн, применение которых перспективно при контроле тонких листов и тонкостенных конструкций.
ЭМА-преобразователи позволяют достаточно просто осуществить фокусировку ультразвуковых колебаний. В ряде случаев такая фокусировка получается естественным путем за счет кривизны поверхности изделия, в котором возбуждаются ультразвуковые колебания. Фокусировку можно осуществить также путем смещенного по фазе управления сегментными приемно-излучающими преобразователями. К недостаткам ЭМА-преобразователей относятся их более низкий (на два-три порядка) коэффициент механической связи по сравнению с пьезопреобразователями и небольшие (1—5 мм) рабочие зазоры между ЭМА-преобразователем и поверхностью контролируемого изделия. Поэтому для получения необходимой чувствительности аппаратуры ультразвукового контроля с ЭМА-преобразователями мощность зондирующих импульсов, поступающих на ЭМА-преобразователь, должна быть существенно больше, чем при использовании пьезопреобразователей. Как показали исследования, удовлетворительная чувствительность аппаратуры с ЭМА-преобразователями при рабочих зазорах до 5 мм получается при индукции постоянного магнитного поля в зазоре 0,7—1,0 Тл.
ЭМА-преобразователи перспективны для автоматизированного ультразвукового контроля качества металлопродукции в технологическом потоке производства, в том числе и при высокой температуре.