

3.5 Визначення показників керованості автомобіля
Критична швидкість автомобіля з умови керованості
де
![]() - кут повороту керованих коліс автомобіля,
град.
- кут повороту керованих коліс автомобіля,
град.
Обчисливши
критичні швидкості з умов керованості
при ![]() = 5, 10, 15, 20, 25, 30, 35, 400,
заносять розрахунки до таблиці 3.6 та
будують залежність критичної швидкості
від кута повороту керованих коліс.
= 5, 10, 15, 20, 25, 30, 35, 400,
заносять розрахунки до таблиці 3.6 та
будують залежність критичної швидкості
від кута повороту керованих коліс.
Таблиця 3.6 - Критична швидкість автомобіля з умов керованості
, град |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
|
19,39 |
13,56 |
10,87 |
9,17 |
7,90 |
6,87 |
5,94 |
5,06 |
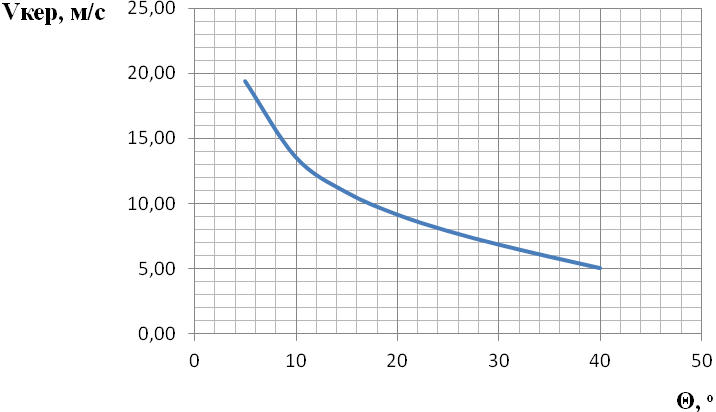
Рисунок 3.6 - Залежність критичної швидкості автомобіля з умови керованості від кута повороту керованих коліс
При русі автомобіля на повороті зі швидкістю понад Vкер керовані колеса будуть ковзати в поперечному напрямі й поворот їх на більший кут не змінить напрямку руху автомобіля. Виходячи з цього можна зробити висновок про межі керованості автомобіля.
Радіус повороту автомобіля при еластичних колесах
![]()
де = 20° - середній кут повороту керованих коліс;
![]() - кути бокового відведення (збочення)
коліс передньої та задньої осей, град:
- кути бокового відведення (збочення)
коліс передньої та задньої осей, град:
![]() ,
,
![]() ,
,
![]() ,
,![]() - бокові сили, які діють на колеса
передньої та задньої осей, Н.
- бокові сили, які діють на колеса
передньої та задньої осей, Н.
Граничні значення бокових сил та , при яких колеса котяться без бокового ковзання, визначають за виразами
![]() ,
,![]()
де
![]() та
та ![]() — сили зчеплення коліс відповідно
передньої осі та візка (середньої та
задньої осей) з полотном дороги;
— сили зчеплення коліс відповідно
передньої осі та візка (середньої та
задньої осей) з полотном дороги;
![]() та
та ![]() - сили тяжіння, що припадають відповідно
на передню вісь та візок автомобіля.
- сили тяжіння, що припадають відповідно
на передню вісь та візок автомобіля.
Квід1 та Квід2 — коефіцієнти опору боковому відведенню (збоченню) одного одинарного колеса передньої осі та візка, Н/град. Для розрахунків приймаю Квід = 1300 Н/град, оскільки для колеса вантажного автомобіля Квід = 800... 1500 Н/град.
Таким чином,
![]() Н
Н
![]() Н
Н
![]() ,Н
,Н
![]() ,Н
,Н
![]()
![]()

При жорстких колесах радіус повороту
Re=12,05 м > R=11,54 м.
Враховуючи, що при Re=R повороткість автомобіля нейтральна, при Rе > R - недостатня, при Rе < R – надлишкова, повороткість автомобіля недостатня.
3.6 Визначення показників плавності ходу автомобіля
Основними оціночними показниками плавності ходу є частота вільних коливань підресорених і непідресорених мас, швидкість, прискорення та швидкість зміни прискорення коливань підресорених мас.
Підресорені маси здійснюють низькочастотні коливання з частотою
де
![]() - статичний прогин підвіски, м;
= 0,08...0,13 м у вантажних автомобілів та
міських автобусів. Менші значення
беруть
для задньої підвіски, більші - для
передньої.
- статичний прогин підвіски, м;
= 0,08...0,13 м у вантажних автомобілів та
міських автобусів. Менші значення
беруть
для задньої підвіски, більші - для
передньої.

Плавність ходу автомобіля задовільна, оскільки для вантажних автомобілів частота коливань підресорених мас має бути в межах 1,3...1,8 Гц.
Непідресорені маси мостів здійснюють високочастотні коливання, зумовлені жорсткістю шин, з частотою
де
![]() - сумарна жорсткість шин моста, Н/м;
- сумарна жорсткість шин моста, Н/м;
mм - маса моста, кг.
Оскільки
дані про жорсткість шин, встановлених
на автомобілі, відсутні, орієнтовно
можна взяти: ![]() для передньої підвіски та
для передньої підвіски та
![]() – для задньої.
– для задньої.
Крім вільних коливань, автомобіль здійснює також вимушені коливання з частотою
![]()
де
![]() - швидкість автомобіля, м/с;
- швидкість автомобіля, м/с;
S - довжина хвилі нерівності на дорозі, м; S = 0,5...5,0 м.
Швидкість руху, при якій може настати резонанс, обчислюють за виразом
![]()
Для S = 4 м:
![]()
![]()
![]()
![]()
Швидкість та прискорення коливань підресорених мас визначають за формулами:
![]()
де
![]() =0,05
м - висота нерівності
=0,05
м - висота нерівності
![]() м/с
м/с
![]() м/с
м/с
![]() м/с2
м/с2
![]() м/с2
м/с2
Швидкість зміни прискорення при коливаннях
![]() м/с
м/с
![]() м/с3
м/с3
![]() м/с3
м/с3
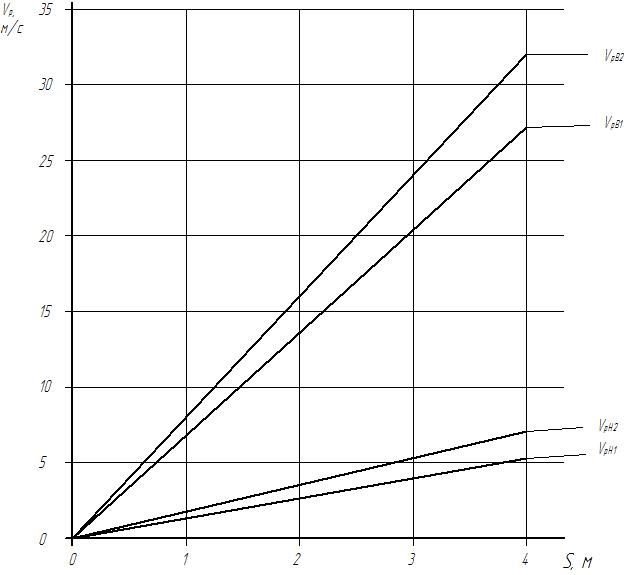
Рисунок 3.7 - Залежність резонансних швидкостей руху автомобіля від довжини нерівності