

СИСТЕМЫ РЕАЛЬНОГО ВРЕМЕНИ |
210 |
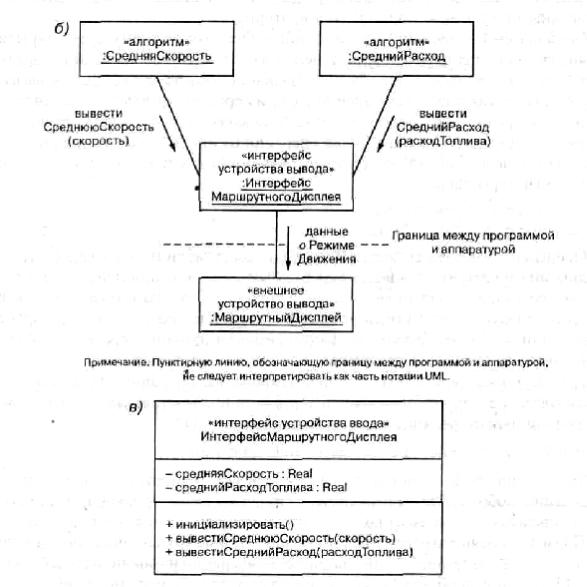
Рис.9.4. Пример класса интерфейса устройства вывода:
б– проектная модель (диаграмма кооперации);
в– проектная модель (диаграмма классов)
9.5.Классы, зависящие от состояния
Класс, зависящий от состояния, инкапсулирует информацию,
которая представлена на диаграмме состояний. На этапе проектиро- вания классов диаграмма состояний, исполняемая зависящим от со- стояния объектом, отображается на таблицу переходов состояний. Таким образом, зависящий от состояния класс скрывает устройство этой таблицы и поддерживает текущее состояния объекта.
Зависящий от состояния класс предоставляет операции для дос- тупа к таблице переходов состояний и для ее изменения. В частности, проектируются операции для обработки входных событий, вызы-
www.pdffactory.com
СИСТЕМЫ РЕАЛЬНОГО ВРЕМЕНИ |
211 |
вающих переходы состояний. Например, можно задать отдельную операцию для каждого такого события. Это означает, что зависящий от состояния класс проектируется специально для конкретной диа- граммы состояний. Хотелось бы, однако, чтобы подобные классы бы- ли более обобщенными и могли использоваться повторно.
Обобщенный зависящий от состояния класс по-прежнему будет скрывать устройство таблицы переходов, но в нем имеется всего две операции: обработатьСобытие и текущееСостояние. Операция об-
работатьСобытие вызывается, когда поступает новое событие, ко- торое и передается в качестве входного параметра. Операция теку- щееСостояние (она может отсутствовать) возвращает состояние ко- нечного автомата. Такая операция нужна лишь в тех приложениях, где клиентам необходимо знать текущее состояние зависящего от со- стояния класса. Вот сигнатуры операций:
обработатьСобытие (событие) текущееСостояние ( ) : Состояние
Операция обработатьСобытие просматривает таблицу перехо- дов состояний с целью определить, что нужно сделать с новым собы- тием, принимая во внимание текущее состояние и заданные в таблице условия. Таблица показывает, в какое состояние следует перейти (ес- ли это необходимо) и какие действия одновременно выполнить. Та- ким образом, операции остается изменить состояние объекта и вы- полнить действия, вызвав операции тех или иных объектов.
Другой, более гибкий подход к проектированию операции обра- ботатьСобытие состоит в том, чтобы не выполнять действие само- стоятельно, а вернуть его в выходном параметре. Тогда сигнатура принимает вид:
обработатьСобытие (in событие, out действие)
Такой зависящий от состояния класс оказывается достаточно общим для инкапсуляции любой таблицы переходов. Устройство
таблицы зависит от приложения и определяется в момент создания или инициализации объекта класса. Пример зависящего от состояния класса в системе круиз-контроля – это класс Управление Калибров- кой. На диаграмме кооперации из аналитической модели (рис.9.5а)
www.pdffactory.com
СИСТЕМЫ РЕАЛЬНОГО ВРЕМЕНИ |
212 |
показан объект Управление Калибровкой, исполняющий диаграмму состояния на рис.9.56.
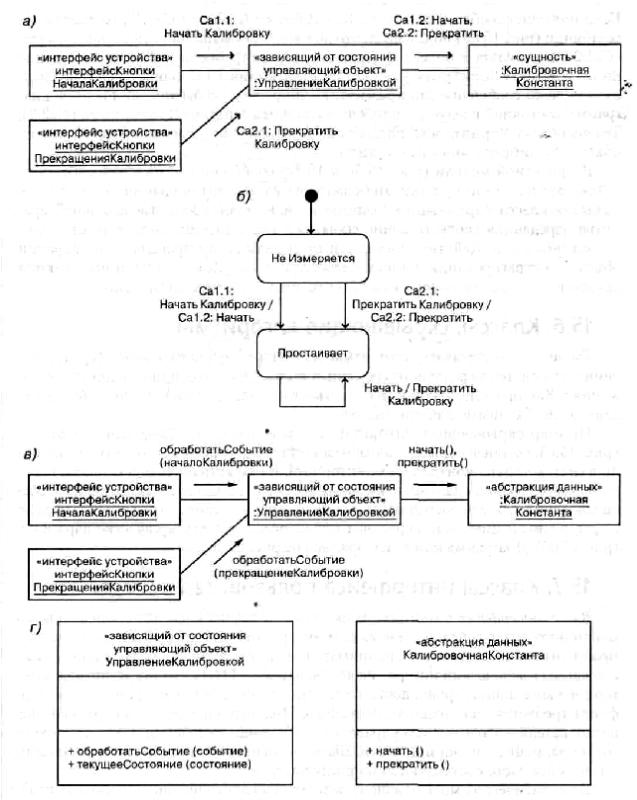
Рис.9.5. Пример зависящего от состояния управляющего класса:
а – аналитическая модель (диаграмма кооперации); б – аналитическая модель (диаграмма состояний); в – проектная модель (диаграмма кооперации); г – про- ектная модель (диаграмма классов)
www.pdffactory.com
СИСТЕМЫ РЕАЛЬНОГО ВРЕМЕНИ |
213 |
Объект Управление Калибровкой получает события Начать Ка-
либровку и Прекратить Калибровку от двух объектов Интерфейс Кнопки Калибровки. Если получено сообщение Начать Калибровку
(событие Ca1.1), то диаграмма состояний (рис.9.56) показывает, что должно быть выполнено действие Начать (Са1.2). В результате объ-
ект Управление Калибровкой посылает сообщение Начать объекту Калибровочная Константа, который выполняет действие. Если же получено сообщение Прекратить Калибровку (событие Са2.1), то из диаграммы состояний следует, что нужно выполнить действие Пре-
кратить (Са2.2). Теперь объект Управление Калибровкой отправляет сообщение Прекратить объекту Калибровочная Константа.
В проектной модели (рис.9.5в и 9.5г) сообщения Начать Калиб-
ровку и Прекратить Калибровку отображаются на вызовы операции
обработать Событие класса Управление Калибровкой, которой в ка-
честве входного параметра передаются соответственно события нача-
лоКалибровки и прекраще-ниеКалибровки. Действия начать и прекра-
тить превращаются в операции объекта абстрагирования данных Ка-
либровочная Константа и вызываются операцией обработатьСо- бытие объекта Управление Калибровкой.
9.6. Классы, скрывающие алгоритмы
Такие классы скрывают алгоритмы, применяемые в предметной области; они типичны в системах реального времени, а также в науч- ных и инженерных приложениях. Как правило, такой класс скрывает не только алгоритм, но и локальные данные, необходимые для его ра- боты.
Пример скрывающего алгоритм класса – это класс Средняя Ско- рость (рис.9.6), который скрывает алгоритм вычисления средней скорости автомобиля в системе круиз-контроля и мониторинга. В нем
есть операция сброс для обнуления внутренних данных и операция вычислить для расчета средней скорости движения. Обе эти опера-
ции вызывают операцию вывести объекта Интерфейс Маршрутного Дисплея, передавая среднюю Скорость в качестве параметра (рис.9.6б). Диаграмма класса изображена на рис.9.6в.
www.pdffactory.com