


СИСТЕМЫ РЕАЛЬНОГО ВРЕМЕНИ |
99 |
6.Обзор нотации UML
Вметоде COMET используется нотация из унифицированного языка моделирования UML, которая объединила нотации, предло- женные Бучем [16], Джекобсоном [21], Рамбо [16] и Харелом [20]. Представим краткий обзор нотации UML.
Co временем нотация UML расширялась, и теперь в ней поддер- живается много различных диаграмм.
6.1.Диаграммы UML
Внотации UML поддерживаются девять видов диаграмм:
§диаграммы прецедентов;
§диаграммы классов;
§диаграммы объектов, являющиеся вариантом диаграмм клас- сов в применении к экземплярам. В методе COMET вместо них работают консолидированные диаграммы кооперации;
§диаграммы кооперации;
§диаграммы последовательности;
§диаграммы состояний;
§диаграммы деятельности (в COMET не используются);
§диаграммы компонентов (в COMET не используются).
§диаграммы развертывания.
6.2.Диаграммы прецедентов
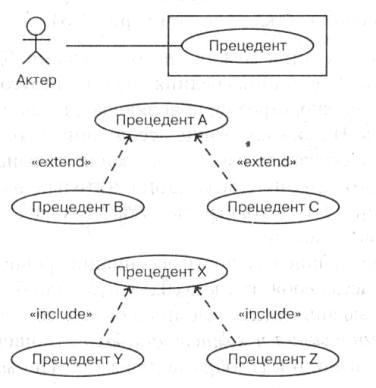
Актер (actor) инициирует прецедент. Прецедент (use case) опи- сывает последовательность взаимодействий между актером и систе- мой. Актер изображается на диаграмме прецедентов в виде фигуры человечка, система – в виде прямоугольника, прецедент – в виде эл- липса внутри этого прямоугольника. Коммуникационные ассоциации связывают актеров с теми прецедентами, в которых они участвуют. Между прецедентами могут быть отношения include (включает) и extend (расширяет). Пример диаграммы прецедентов представлен на рис.6.1.
www.pdffactory.com
СИСТЕМЫ РЕАЛЬНОГО ВРЕМЕНИ |
100 |
6.3. Нотация UML для классов и объектов
Классы и объекты изображаются в UML прямоугольниками, как показано на рис.6.2.
Рис. 6.1. Диаграммы прецедентов в нотации UML
В прямоугольнике класса всегда вписано имя класса. Дополни- тельно могут быть указаны атрибуты и операции класса. Когда при- сутствуют все три элемента, то в верхней секции прямоугольника на- ходится имя класса, в средней – атрибуты, а в нижней – операции.
Для того чтобы отличить класс (тип) от объекта (экземпляра типа), имя объекта подчеркивается. Объект может обозначаться как anObject,anotherObject:Class или :Class. Классы и объекты встреча-
ются в разных диаграммах UML.
www.pdffactory.com
СИСТЕМЫ РЕАЛЬНОГО ВРЕМЕНИ |
101 |
Рис. 6.2. Объекты и классы в нотации UML
6.4. Диаграммы классов
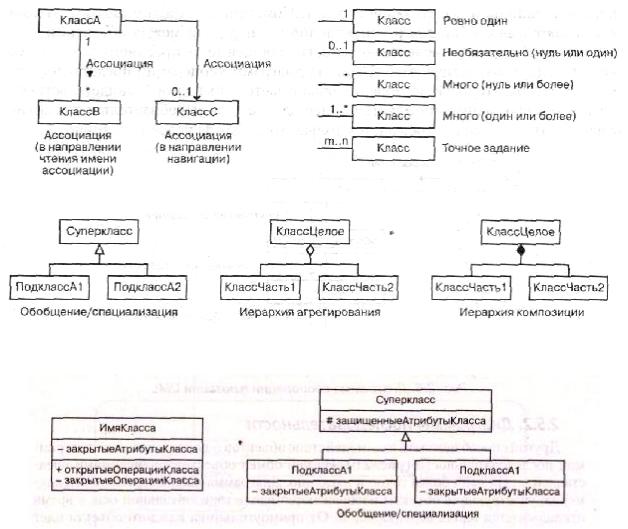
На такой диаграмме классы изображаются в виде прямоуголь- ников, а статические (постоянные) отношения между ними – в форме дуг. Поддерживаются три основных типа отношений между классами
(рис. 6.3):
–ассоциации. Ассоциация между двумя классами (бинарная ас- социация) изображается в виде линии, соединяющей прямоугольники классов. У нее есть имя и, возможно, стрелка, поясняющая, в каком направлении следует это имя читать. На каждом конце ассоциации проставляется кратность – число, свидетельствующее, сколько экзем- пляров одного класса связано с одним экземпляром другого класса.
Дополнительно на каждом конце ассоциации может присутствовать стрелка, указывающая направление навигации вдоль данной ассоциа- ции.
Допустимы следующие кратности ассоциации: ровно один (1), присутствие экземпляра класса необязательно (0..1), нуль или более (*), один или более (1..*) и точное задание числа экземпляров классов
(m..n), где m и n - числа;
–иерархии агрегирования и композиции. Это отношения вида целое/часть. Отношение композиции (изображается закрашенным ромбом) накладывает более сильные ограничения на экземпляры классов, чем отношение агрегирования (показывается незакрашен- ным ромбом). Ромб одной вершиной примыкает к прямоугольнику класса, являющегося частью в отношении вида «часть/целое»;
www.pdffactory.com
СИСТЕМЫ РЕАЛЬНОГО ВРЕМЕНИ |
102 |
– иерархия обобщения/специализации. Это отношение вида «яв-
ляется». Обобщение изображается в виде стрелки, ведущей от под- класса (потомка) к суперклассу (родителю), причем стрелка упирает- ся в прямоугольник суперкласса.
Видимость определяет, доступен ли элемент класса вне самого класса (рис. 6.4). Показывать видимость на диаграмме необязательно. Открытая видимость, изображаемая символом + (плюс), означает, что элемент виден извне класса.
Закрытая видимость, отмеченная знаком – (минус), свидетельст- вует о том, что элемент виден только внутри класса, в котором он оп- ределен, а от других классов скрыт. Защищенная видимость, показы- ваемая знаком #, говорит о том, что элемент виден внутри класса, в котором определен, а также во всех подклассах этого класса.
Рис. 6.3. Нотация UML для связей на диаграмме классов
Рис. 6.4. Нотация UML для обозначения видимости на
диаграмме классов
www.pdffactory.com