

3. Принципы построения систем тактовой синхронизации
В работе синхронных каналов связи тактовая синхронизация служит для правильной регистрации принимаемой дискретной информации. Особенности работы распределителей тактовой частоты передающей и приемной аппаратуры таковы что без специальных мер поддержания синхронности их работы из-за нестабильности опорных генераторов происходит взаимный фазовый сдвиг формируемых импульсов. Это приводит к неправильной регистрации принимаемых информационных знаков (рис. 5).
В некоторых случаях когда время сеанса связи не превышает времени сохранения синхронизма опорных генераторов, возможно использование автономных источников тактовой частоты (в качестве автономного источника может быть использован местный высокостабильный генератор). В других случаях для поддержания синхронности работы приемника, используются принудительные методы синхронизации основанные на использовании отдельного канала для подстройки местного генератора тактовой частоты приемника, или на синхронизации по фронтам элементарных информационных посылок (по элементам).
Д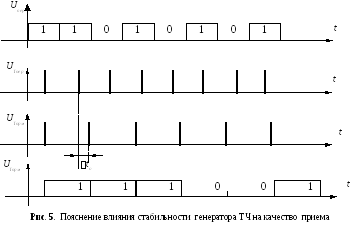 ополнительный
канал синхронизации снижает параметры
эффективного использования рабочего
канала радиосвязи. Для радиоканалов
применяемых в направлении мобильная
станция – базовая станция эти потери
неприемлемы
поэтому на практике чаще используется
метод тактовой синхронизации по
элементам.
ополнительный
канал синхронизации снижает параметры
эффективного использования рабочего
канала радиосвязи. Для радиоканалов
применяемых в направлении мобильная
станция – базовая станция эти потери
неприемлемы
поэтому на практике чаще используется
метод тактовой синхронизации по
элементам.
Для поддержания синхронности работы приемника используются принудительные методы синхронизации, основанные на использовании отдельного канала для подстройки местного генератора тактовой частоты или на синхронизации местного генератора по элементам (по фронтам элементарных информационных посылок). Дополнительный канал синхронизации снижает эффективность использования рабочего канала радиосвязи. Для применяемых радиоканалов эти потери неприемлемы, в связи с чем на практике чаще используется метод тактовой синхронизации по элементам.
По
способу формирования тактовых импульсов
устройства синхронизации по элементам
подразделяются на разомкнутые и
замкнутые. Из-за большой зависимости
точности синхронизации разомкнутых
устройств от статистической структуры
информационного сообщения в действующих
системах связи используются замкнутые
устройства,подверженные
этой зависимости в меньшей мере. Из всех
замкнутых систем наибольшее распространение
получило устройство синхронизации с
добавлением и вычитанием импульсов на
выходе делителя частоты местного
опорного генер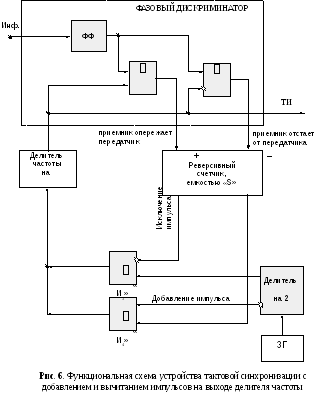 атора
(рис. 6).
атора
(рис. 6).
Принцип подстройки фазы тактовой частоты иллюстрируется на рис. 7.
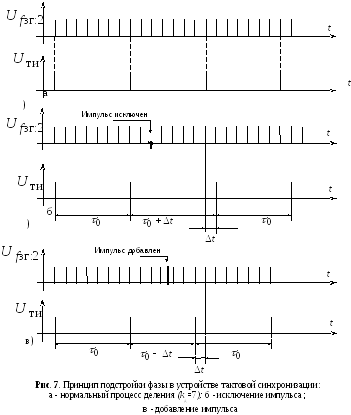
Если частота приемника отстает от частоты передатчика, то
сигнал управления появится на выходе схемы И2, что приведет к появлению дополнительного импульса на выходе схемы ИЛИ. В результате тактовая последовательность на выходе делителя сдвинется в сторону опережения на t. При пропадании входного сигнала положение тактовой последовательности на выходе делителя обусловлено лишь значением коэффициента деления и стабильностью ЗГ.
В рассмотренной выше ситуации не учитывались краевые искажения принимаемых элементарных посылок. В реальных условиях принимаемые импульсы сигнала могут быть искажены за счет флуктуационных помех эфира. Эти искажения приводят к ложной подстройке частоты, что, ведет соответственно к снижению точности синхронизации. Учитывая случайность смещений краевых искажений, можно полагать, что отставание и опережение фронтов принимаемых импульсов будет равновероятным. Влияние этих искажений на точность синхронизации можно уменьшить за счет использования инерционного элемента - реверсивного счетчика на S - тактов. В этом случае ложное корректирование фазы может произойти лишь в том случае, когда S подряд принимаемых информационных элементов будут смещены вправо или влево относительно идеального положения. Такое событие при воздействии флуктуационных помех маловероятно.
Таким образом, данное устройство подстройки тактовой частоты обеспечивает высокую устойчивость работы тактовой синхронизации приемника независимо от структуры сигнала при воздействии флуктуационных помех.
В общем случае, на устойчивость работы устройств тактовой синхронизации может влиять нестабильность работы местных опорных генераторов и краевые искажения фронтов элементарных посылок за счет их дробления или затягивания, вызванных естественными или искусственными источниками помех, оценить влияние которых можно по техническим характеристикам устройств тактовой синхронизации.
К основным характеристикам устройств тактовой синхронизации по элементам относятся:
- погрешность синхронизации - величина, выраженная в долях единичного интервала и равная наибольшему отклонению синхросигналов от их оптимального (идеального) положения, которое с заданной вероятностью может произойти при работе устройства синхронизации;
- время синхронизации tсин - время, необходимое для корректирования первоначального отклонения синхроимпульсов относительно границ принимаемых элементов;
- время поддержания синхронизма tп.с - время, в течение которого отклонение синхроимпульсов от границ единичных элементов не выйдет за допустимый предел рассогласования () при прекращении работы устройства синхронизации по подстройке фазы.
Для рассматриваемого устройства погрешность синхронизации состоит из двух составляющих:
![]() (3.1)
(3.1)
где ст - статическая погрешность синхронизации вызванная нестабильностью задающих генераторов приемника и передатчика, и - шагом коррекции дин - динамическая погрешность вызываемая краевыми искажениями единичных элементов.
В свою очередь статическая погрешность синхронизации складывается из двух составляющих: погрешности‚ обусловленной дискретным шагом синхронизации и погрешности‚ обусловленной смещением тактового импульса за время между двумя подстройками:
![]() (3.2)
(3.2)
где
= 1/kд
-
шаг коррекции
т.е. смещение фазы тактовых импульсов
в долях единичного интервала (o)
на выходе делителя частоты при добавлении
или вычитании одного корректирующего
импульса (см. рис. 7)
![]() - коэффициент деления делителя частоты
местного генератора тактовой частоты
2k
-
суммарный коэффициент нестабильности
генераторов передатчика и приемника;
S
- емкость реверсивного счетчика;
- коэффициент деления делителя частоты
местного генератора тактовой частоты
2k
-
суммарный коэффициент нестабильности
генераторов передатчика и приемника;
S
- емкость реверсивного счетчика;
![]()
![]() -
среднее число принимаемых подряд
элементов одного знака
определяющее период корректирования
-
среднее число принимаемых подряд
элементов одного знака
определяющее период корректирования
![]() =
2...3.
=
2...3.
Статическая погрешность ст синхронизации с реверсивным счетчиком тем меньше чем больше коэффициент деления делителя kд - меньше нестабильность генератора (k = f/fо) и емкость реверсивного счетчика S.
Динамическая погрешность синхронизации дин в случае действия только флуктуационных помех представляет собой случайную величину, подчиняющуюся гауссовскому закону, и согласно [60] определяется приближенным выражением
 (3.3)
(3.3)
где дин - среднеквадратическое значение динамической погрешности;
кр - среднеквадратическое значение краевых искажений единичных элементов. Величина динамической погрешности снижается с ростом значений параметров S и kд , т.е. влияние этих параметров на дин противоположно влиянию на статическую погрешность. Следовательно, при конструировании устройств тактовой синхронизации необходим компромисс, который определяется из общего выражения оценки погрешности :
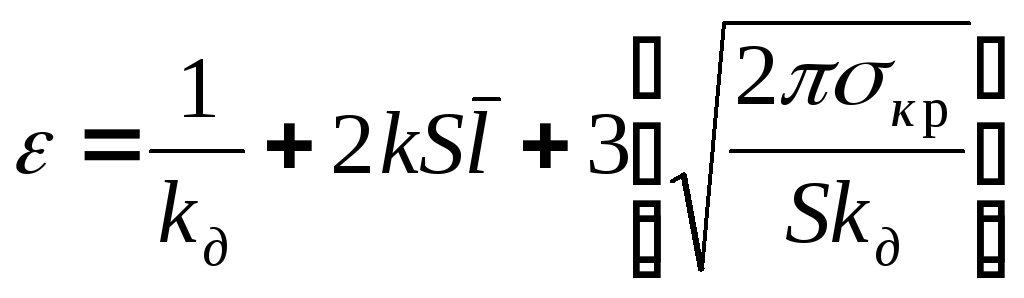 . (3.4)
. (3.4)
Время вхождения в синхронизм при максимальной расстройке фаз тактовой частоты (0/2) определяется формулой [58]
![]()
(3.5)
(3.5)
где
![]() -
скорость манипуляции в радиоканале;
-
скорость манипуляции в радиоканале;
о - длительность элементарной посылки.
Время поддержания синхронизма между двумя подстройками определяется выражением [60]
![]()
(3.6)
(3.6)
где - исправляющая способность приемника, определяемая способом регистрации принимаемых элементарных посылок [33]
ост=t/o - остаточная погрешность устройства синхронизации;
t - шаг смещения тактового импульса за интервал подстройки (см. рис. 7).
При проектировании устройства тактовой синхронизации его параметры устанавливают из условий допустимых краевых искажений, определяемых исправляющей способностью используемого способа считывания информационных посылок. Повышение устойчивости устройства достигается за счет максимального снижения времени синхронизации tсин. и увеличения времени поддержания синхронизма tп.с.
Таким образом решается проблема обеспечения устойчивой работы устройства тактовой синхронизации при прогнозируемых дестабилизирующих факторах: нестабильности местных генераторов тактовой частоты и флуктуационных помехах эфира.