

3 Рулевые механизмы
Рулевой механизм усилие от рулевого колеса передает на РП. Кинематическое передаточное число РМ равно 15-25, а к.п.д. его в зависимости от конструкции - 0,7-0,9. Классификация РМ приведена на рисунке 5. Основные конструкции рулевых механизмов представлены на рисунке 6
Рисунок 5 –Схема классификации рулевых механизмов
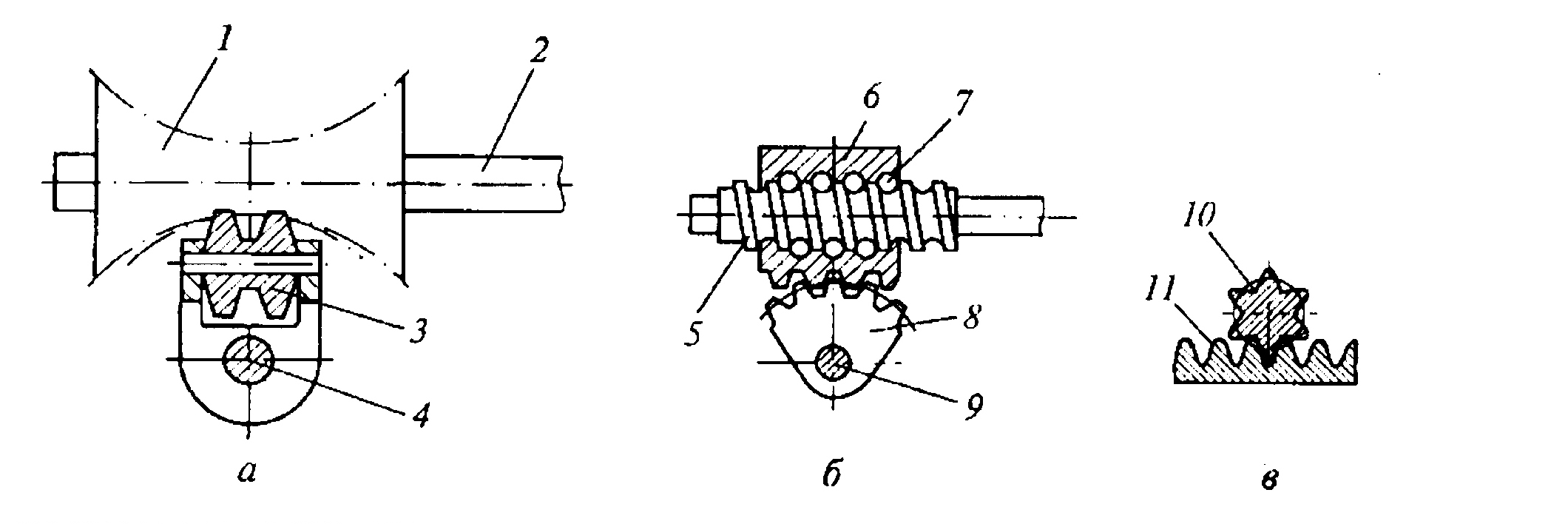
а – червячно-роликовый; б – винтореечный; в – реечный; 1 – червяк; 2, 4, 9 – валы; 3 – ролик; 5 – винт; 6 – шариковая гайка-рейка; 7 – шарик; 8 – зубчатый сектор; 10 – шестерня; 11 – рейка
Рисунок 6 – Рулевые механизмы
По количеству пар зацепления РМ могут быть одинарными, двойными, тройными. Последние позволяют увеличить передаточное отношение. Конструкция наиболее часто применяемого червячно-роликового механизма приведена на рисунке 7. Для компенсации износа подшипников и пары зацепления предусмотрена их регулировка. В картер РМ заливают трансмиссионное масло с целью уменьшения износов и потерь на трение.
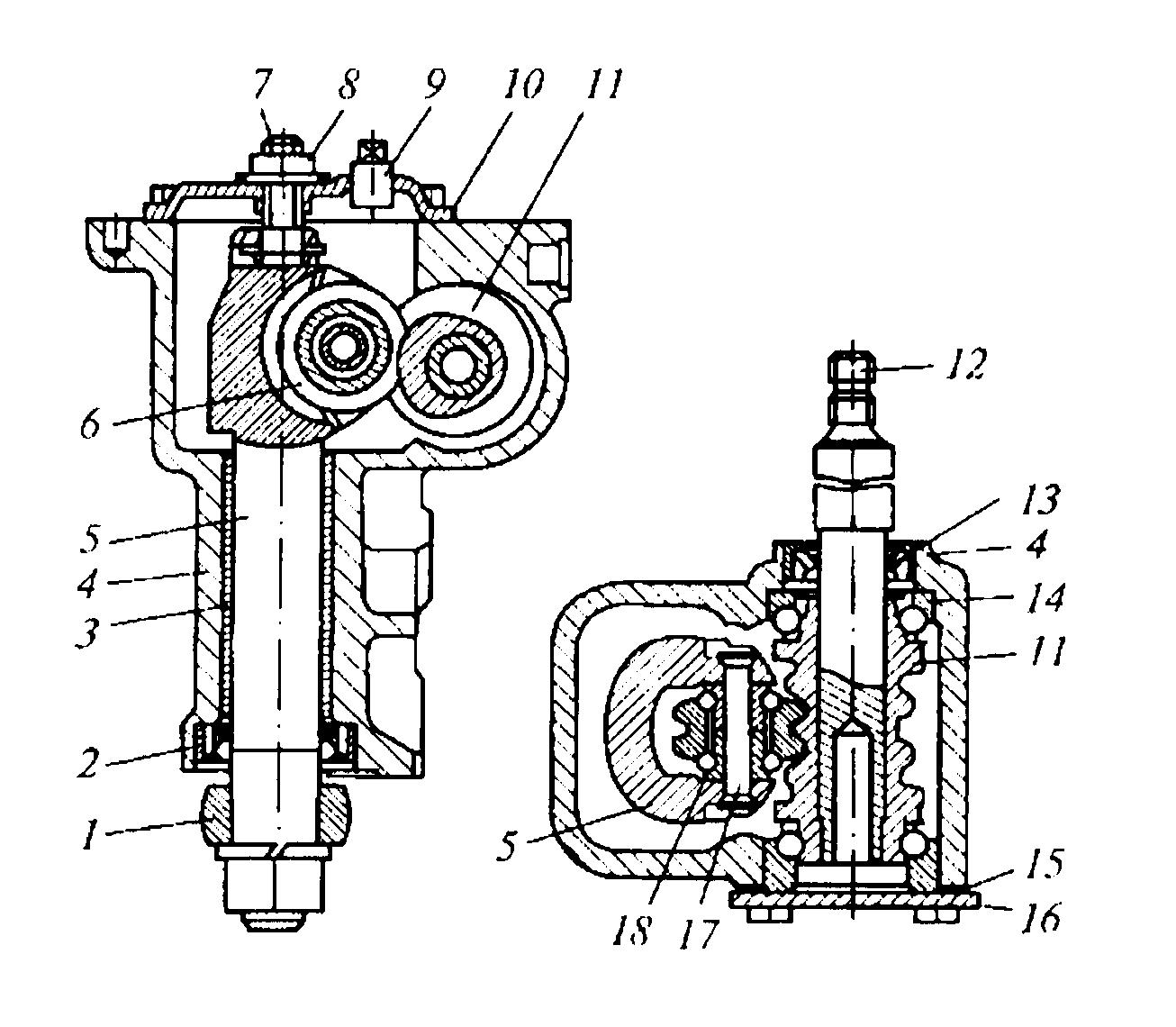
1 – сошка; 2,13 – манжеты; 3 – втулка; 4 – картер; 5,12 – валы; 6 – ролик; 7 – регулировочный винт; 8 – гайка; 9 – заливная пробка; 10,16 – крышки; 11 – червяк; 14,18 – шариковый и игольчатый подшипники; 15 – регулировочная прокладка; 17 – ось
Рисунок 7 – Рулевой механизм червяк- ролик
Для снижения тяжести травмирования водителя при ДТП привод к рулевому механизму иногда выполняются в травмобезопасном варианте (рисунок 8).
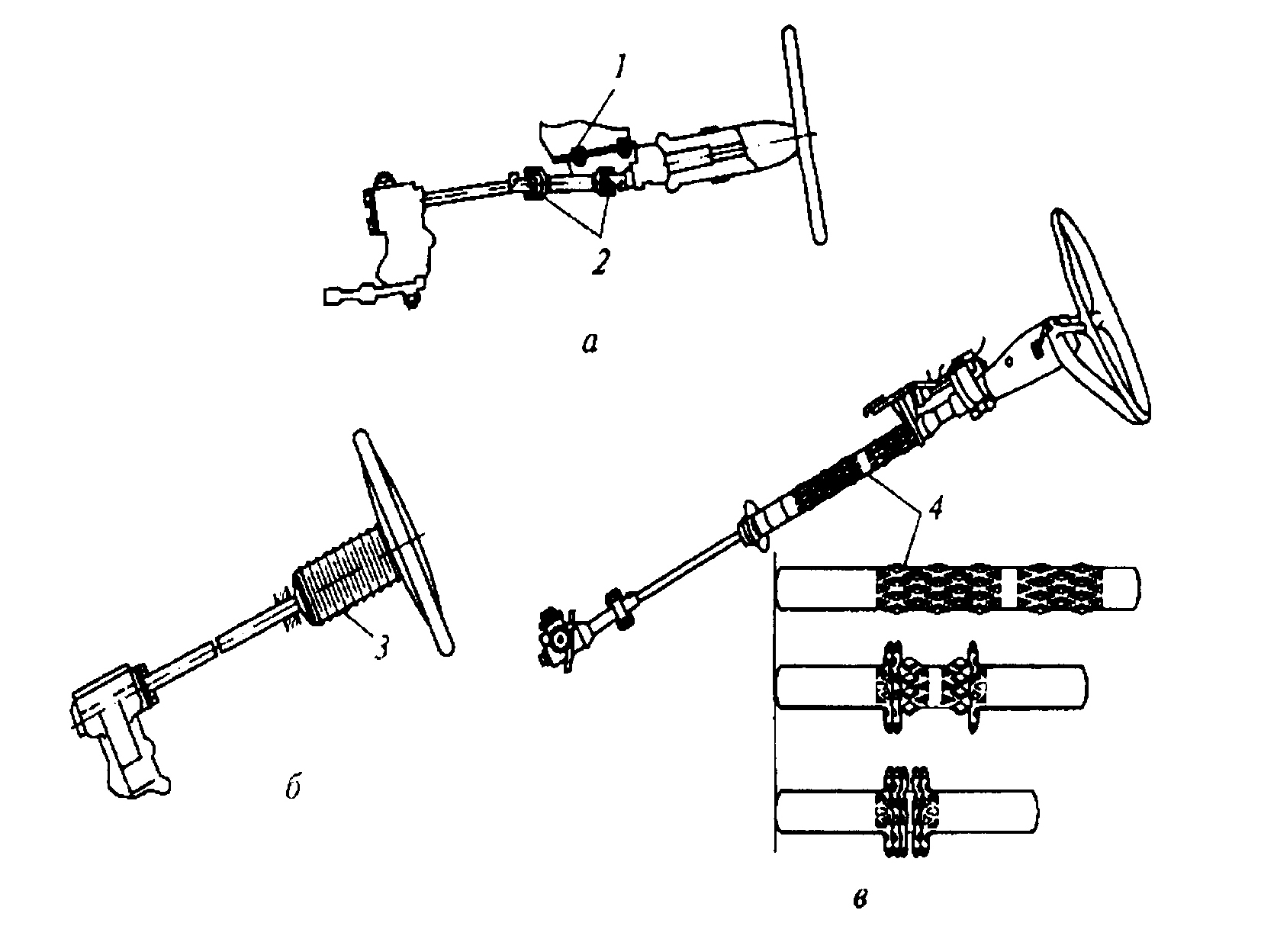
а – с составным валом; б – с сильфоном; в – с перфорированной трубкой; 1 – кронштейн; 2 – карданные шарниры; 3 – цилиндр; 4 – труба
Рисунок 8 – Травмобезопасный привод к рулевому механизму
4 Рулевой привод
РП- совокупность устройств для передачи усилий от рулевого механизма к управляемым колесам.
Особенностью РП является изменяющееся передаточное отношение (0,8-1,1) в зависимости от угла поворота управляемых колёс. Эта особенность объясняется изменением длин плеч рычагов рулевой трапеции при повороте колёс. Трапеция должна быть такой конструкции и размеров, чтобы обеспечивался поворот управляемых колёс на разный угол, тем самым предотвращая их проскальзывание (рисунок 9)
сtg θв =ctg θн +В /L (1)
Минимальный радиус поворота характеризует управляемость автомобиля и равен для схем (а) и (в)
Rн min = L /sin θн max (2)
Для схемы (б), на которой управляемыми являются передние и задние колеса, наименьший радиус равен
Rн min = L / 2∙sin θн max
а) б) в)
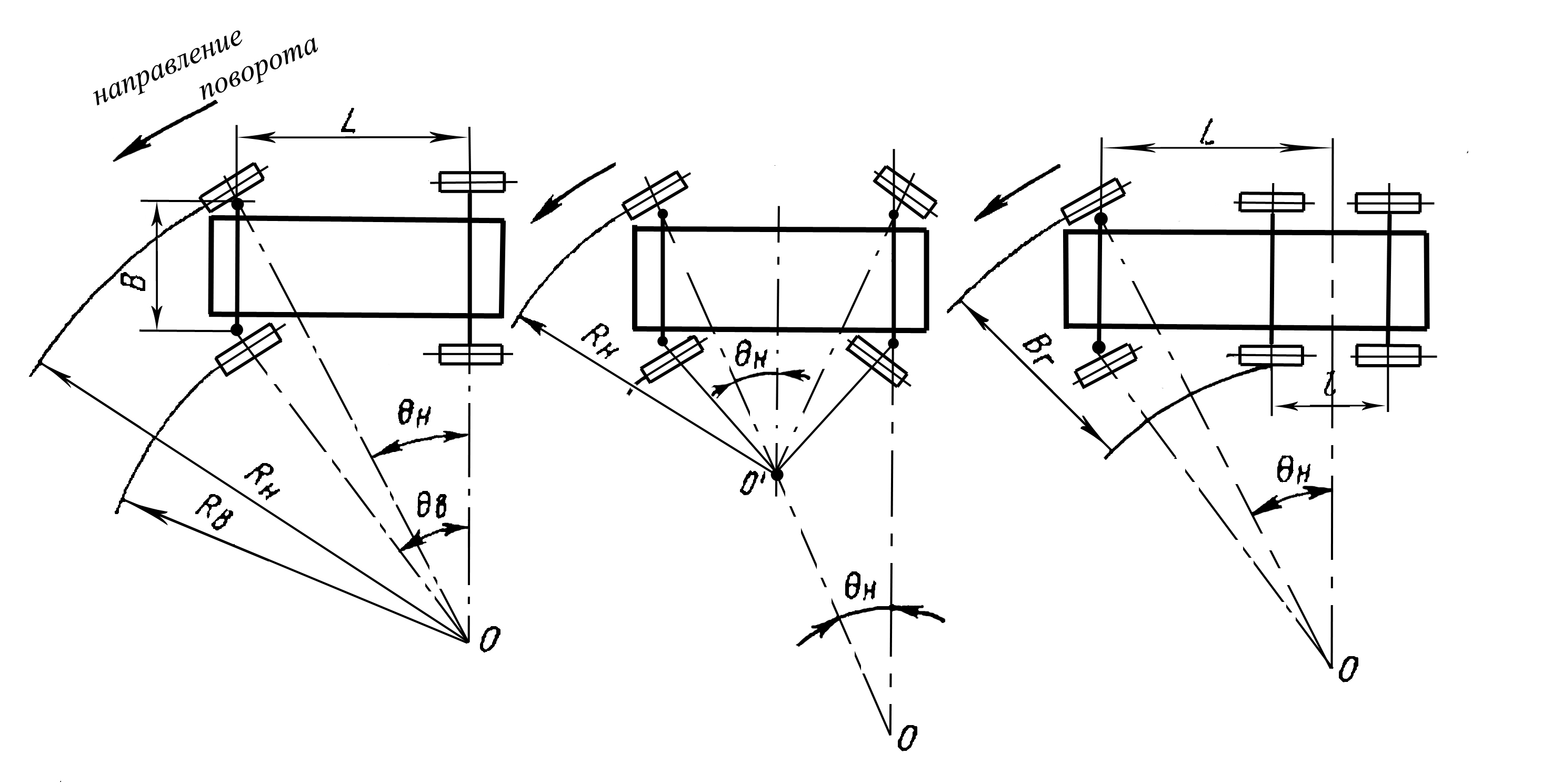
Рисунок 9- Схемы поворота автомобиля: а, в- управляемыми являются колеса одной оси; б-управляемыми являются колеса двух осей
Классификация РП приведена на рисунке 10. Для возможности изменения относительного положения рычагов и тяг привода при повороте рулевого колеса они имеют шарнирные (подвижные) соединения (рисунок 11).
По наличию усилителя
С усилителем
Без усилителя
Рисунок 10-Схема классификации рулевых приводов
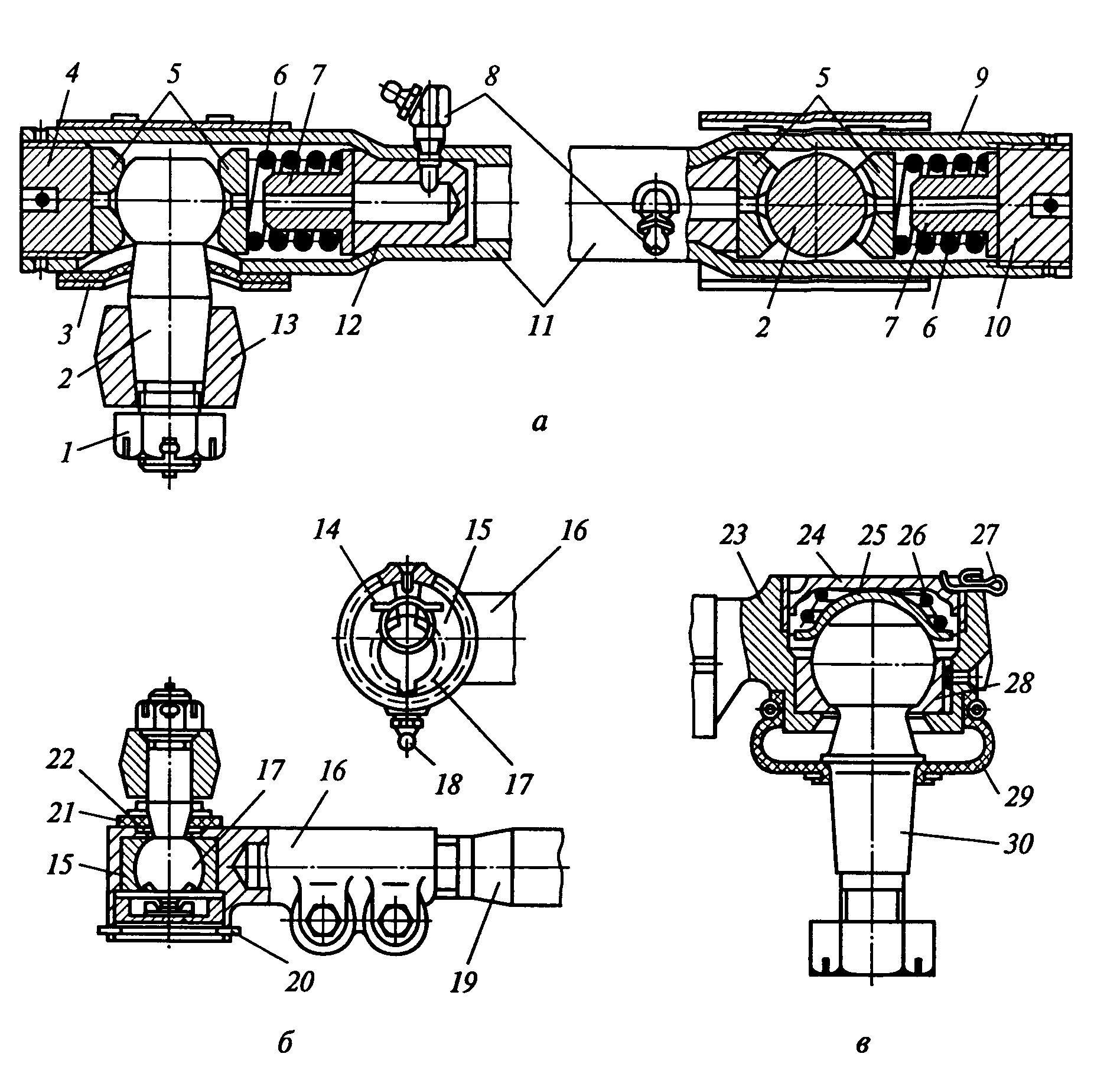
а – продольной; б, в – поперечной; 1 – гайка сошки продольной рулевой тяги; 2 – шаровой палец; 3 – сальник; 4, 10 , 24 – регулировочные пробки сухарей; 5 – сухари продольной тяги; 6 – пружины сухарей продольной тяги; 7 – упор; 8, 18 – маслёнки; 9, 12 – головки шаровых пальцев; 11 – продольная тяга; 13 – сошка рулевого механизма; 14, 22 – пружины сухарей поперечной тяги; 15 – сухари поперечной тяги; 16 – наконечники; 17 – шаровой палец нижнего рычага поворотного кулака; 19, 23 – поперечные тяги; 20 – пробка; 21 – сальник; 25 – вогнутая тарелка; 26 – коническая пружина; 27 – шплинт пробки; 28 – металлокерамический вкладыш; 29 – защитный колпак; 30 шаровой палец
Рисунок 11 – Шарнирные соединения рулевых тяг