

2. Планетарные передачи
2.1. Общие сведения
Планетарными называют передачи, имеющие зубчатые колеса с перемещающимися осями. Наиболее широко применяют простую однорядную передачу (рис. 2.1), которая состоит из центрального вращающегося колеса а с неподвижной геометрической осью и наружными зубьями, неподвижного центрального колеса b (колесо соединено с корпусом) с внутренними зубьями, сателлитов g – колес с наружными зубьями, которые зацепляются одновременно с колесами а и b (число сателлитов nw в передаче может быть от 3 до 6, на рисунке nw = 3), и водила h, на котором расположены оси сателлитов. Водило соединено с тихоходным валом.
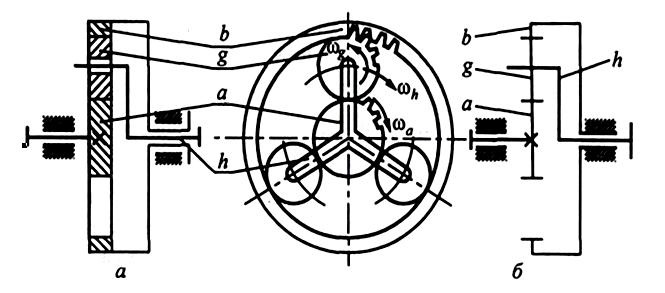
Рис. 2.1. Планетарные передачи:
а – конструктивная схема, б – кинематическая схема
Передача работает следующим образом: при неподвижном колесе b вращение колеса а вызывает вращение сателлита g относительно собственной оси, а обкатывание сателлита по колесу b перемещает его ось и вращает водило h. Сателлит совершает вращение относительно водила и вместе с водилом вращается вокруг центральной оси. Движение сателлитов схоже с движением планет вокруг Солнца, поэтому передачи назвали планетарными.
При неподвижном колесе b чаще ведущим бывает центральное колесо а (тогда движение передаются oт колеса а к водилу h), но возможна передача движения и от водила h к колесу а.
При неподвижном колесе b ведущим в планетарной передаче может быть (чаще всего) центральное колесо а (и тогда движение передается oт колеса а к водилу h) или водило (и тогда движение передается от водила h к колесу а).
Основными звеньями планетарной передачи являются звенья, воспринимающие внешние вращающие моменты. На рис. 2.1. основные звенья а, b, h – два центральных колеса (2К) и водило (h). Кратко такую передачу обозначают как «2К-h». Внешние моменты на звеньях обозначают: Та – момент на ведущем валу, Тb – момент на неподвижном колесе b (на корпусе), Th – на ведомом (тихоходном) валу.
Следует иметь ввиду:
в планетарных передачах применяют не только цилиндрические, но и конические колеса с прямым или косым зубом;
для наиболее часто применяемых схем передач характерно наличие либо высокого КПД, либо большого передаточного отношения в одной передаче;
для получения больших передаточных отношений в силовых приводах применяют многоступенчатые планетарные передачи.
Достоинствами планетарных передач являются:
широкие кинематические возможности, позволяющие использовать их в силовых передачах и приборах в качестве редуктора с постоянным передаточным отношением (в передаче, изображенной на рис. 2.1. при заданной угловой скорости ведущего звена угловые скорости всех остальных звеньев принимают вполне конкретные значения, поэтому рассматриваемая передача имеет постоянное передаточное число); в качестве коробки скоростей, передаточное отношение в которой изменяют путем поочередного торможения различных звеньев; в качестве дифференциального механизма в автомобилях, тракторах, станках, приборах (см. ниже); часто применяют планетарную передачу, совмещенную с электродвигателем (мотор-редуктор, мотор-колесо);
компактность и малая масса (масса по сравнению с непланетарными зубчатыми может быть уменьшена в 2–4 раза), так как передаваемая мощность распределяется по нескольким потокам (равным числу сателлитов), что позволяет снизить нагрузку на зубья в каждом зацеплении в несколько раз;
внутренне зацепление (колеса b и g) обладает повышенной нагрузочной способностью, т.к. у него больший приведенный радиус кривизны в зацеплении (см. знаки « ±» в формуле определения приведенного радиуса кривизны);
большие передаточные отношения при малом числе колес (до тысячи и больше) без применения многоступенчатых передач (но нужно помнить, что с увеличением передаточного отношения в одной передаче КПД уменьшается);
малая нагрузка на опоры, т.к. при симметричном расположении сателлитов радиальные нагрузки на валы и их опоры уравновешиваются;
работа с меньшим шумом по сравнению с обычными зубчатыми передачами за счет повышенной плавности внутреннего зацепления, замыкания сил в механизме, обуславливающими передачу меньших сил на корпус.
К недостаткам планетарных передач относятся:
повышенные требования к точности изготовления и монтажа;
большое число подшипников качения;
необходимость использования долбяка (зубодолбежных станков) для нарезания колес с внутренними зубьями.
Если в планетарной передаче создать условия, когда все основные звенья подвижны (освободив неподвижное колесо и придав ему вращение), передачу называют дифференциальной: такая передача позволяет суммировать движения двух звеньев на одном или раскладывать движения одного звена на два остальных (рис. 2.2).
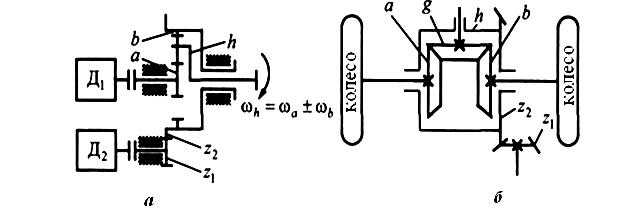
Рис. 2.2. Планетарные дифференциальные передачи:
а – суммирующая скорости движения, б – раскладывающая скорости движения
Схема, приведенная на рис. 2.2, а, обеспечивает суммирование движений звена а (двигатель Д1) и звена b (двигатель Д2) на водиле h. Здесь между двигателем Д2 и колесом b поставлена дополнительная передача z1, z2 для получения необходимого вращающего момента на колесе b. Схема применяется в системах автоматического управления.
Схема, приведенная на рис. 2.2, б, представляет собой дифференциал заднего моста автомобиля. Он состоит из конических зубчатых колес, которые насаживаются на ведущие полуоси автомобиля и сцепляются с сателлитом g, свободно сидящим на оси, закрепленной во вращающемся водиле h. Двигатель приводит водило в движение посредством конической зубчатой пары z1, z2 . Пока автомобиль движется по прямой дороге, силы сцепления колес с дорогой одинаковы, угловые скорости полуосей также одинаковы и равны угловой скорости водила. На закруглённом участке дороги колесо, движущееся по внешней кривой, проходит больший путь, чем колесо, движущееся по внутренней кривой. Если бы оба колеса автомобиля были закреплены на одной оси, то наблюдалось бы скольжение покрышек по дороге, что обусловливало бы их значительный износ. При использовании дифференциала сателлит g обкатывает колеса и одновременно вращается вокруг своей оси, в результате чего угловые скорости полуосей и ведущих колес автомобиля оказываются различными (т.е. при повороте одно колесо вращается быстрее другого). Скольжение покрышек по дороге прекращается или сводится к минимуму.