

Глава 5. Электропривод постоянного тока
5.1. Двигатель постоянного тока
Для работы ДПТ необходим выпрямитель с выходным напряжением постоянного тока. ДПТ имеет обмотку на якоре и обмотки возбуждения, добавочных полюсов и компенсационную – на статоре. В машинах малой и средней мощности вместо компенсационной обмотки используется сериесная обмотка. Напряжение на якорь подводится через щетки и коллектор. Щетки являются быстро изнашивающимися деталями, что делает необходимым периодическое обслуживание двигателя. Благодаря своим высоким регулировочным свойствам ДПТ находит применением в АЭП.
5.2. ДПТ независимого и последовательного возбуждения
Различают два принципиально отличающиеся механическими характеристиками варианта ДПТ:
ДПТ независимого возбуждения
Д
 ПТ
последовательного возбуждения
ПТ
последовательного возбуждения
Рис. 9. Схемы двигателей и их механические характеристики
Двигатели независимого возбуждения преобладают в промышленности, а последовательного возбуждения используются только для специального применения (подъемные и транспортные машины). Поэтому вся последующая информация относится только к двигателям независимого возбуждения.
5.3. Регулирование скорости вращения
Регулирование скорости ДПТ может осуществляться как изменением напряжения на якоре, так и изменением тока возбуждения (потока возбуждения). Различают часть диапазона регулирования скорости, в которой меняется напряжение на якоре при постоянном токе возбуждения (магнитном потоке), и часть, где изменяется поток возбуждения при постоянном напряжении на якоре. На рис. 10 представлена регулировочная характеристика. Наиболее часто используется регулирование напряжением при постоянном потоке возбуждения.
Р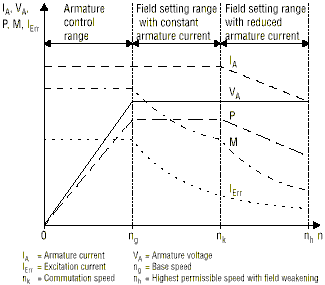 ис.10.
Рабочие характеристики ДПТ независимого
возбуждения
ис.10.
Рабочие характеристики ДПТ независимого
возбуждения
5.4. Мощность, пульсации, коэффициент формы
Табличка на двигателе содержит номинальные данные: мощность, скорость, напряжение и ток возбуждения и т.д. Приведенная в табличке мощность относится к двигателю при питании его гладким по форме током (без пульсаций).
При питании от
аккумуляторной батареи или от сети
чисто постоянного тока мощность на валу
соответствует номинальной мощности.
При питании двигателя от выпрямителя
она зависит от типа выпрямителя (1-, 2-,
3- или 6-фазная схема выпрямления), т.к.
ток имеет пульсирующий характер. При
работе на активную нагрузку ток в
зависимости от способа выпрямления
характеризуется параметрами,
представленными на рис. 11, где:
![]() - длительность периода;
- длительность периода;
![]() - коэффициент формы;
- коэффициент формы;
![]() - коэффициент пульсаций;
- коэффициент пульсаций;
![]() - среднее значение выпрямленного тока;
- среднее значение выпрямленного тока;
![]() - среднеквадратичное значение выпрямленного
тока;
- среднеквадратичное значение выпрямленного
тока;
![]() - пиковое значение тока.
- пиковое значение тока.
Р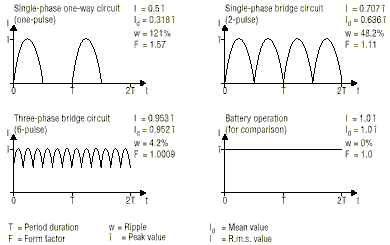 ис.
11. Форма кривых постоянного тока при
различных схемах включения выпрямителя
ис.
11. Форма кривых постоянного тока при
различных схемах включения выпрямителя
Пульсирующий ток
создает в ДПТ меньший момент, чем ток
без пульсации. Потери в двигателе из-за
высокочастотных гармоник, определяемых
величиной пульсаций
![]() и коэффициентом формы
и коэффициентом формы
![]() ,
превышают потери при токе без пульсации.
Из-за этого двигатель нагревается
сильнее.
,
превышают потери при токе без пульсации.
Из-за этого двигатель нагревается
сильнее.
Наиболее простое решение – это сглаживание выпрямленного тока соответствующей индуктивностью. Хотя якорь ДПТ также обладает индуктивностью, ее во многих случаях оказывается недостаточно. Тогда приходится вводить в якорную цепь дополнительный сглаживающий дроссель.
Д ля
двигателейSEW
указанная в табличке номинальная
мощность гарантируется при пульсациях
до
ля
двигателейSEW
указанная в табличке номинальная
мощность гарантируется при пульсациях
до
![]() =30%
или коэффициента формы
=30%
или коэффициента формы
![]() =1,05.
При большем коэффициенте формы или при
большем уровне пульсаций момент и
мощность надо уменьшать (рис.12).
=1,05.
При большем коэффициенте формы или при
большем уровне пульсаций момент и
мощность надо уменьшать (рис.12).
Рис. 12. Уменьшение момента по сравнению с номинальным в зависимости от коэффициентов формы и пульсаций
Однако, т.к. двигатели
при малых выходных напряжениях
преобразователя редко работают с
постоянной нагрузкой, то в этих случаях
рекомендуется принимать
![]() =1,11.
=1,11.
При полностью управляемой трехфазной мостовой схеме выпрямления (шестипульсное выпрямление) обычно можно обойтись без сглаживающего дросселя. Но в этом случае обязательно требуется проверочный расчет.
Индуктивность
дополнительного дросселя в якорной
цепи для неблагоприятного угла управления
и
![]() =1,11
можно рассчитать по следующей формуле
=1,11
можно рассчитать по следующей формуле
![]() ,
мГн
,
мГн
где
![]()
![]() - номинальный ток якоря, А;
- номинальный ток якоря, А;
![]() - индуктивность якорной цепи, мГн;
- индуктивность якорной цепи, мГн;
![]() - коэффициент, зависящий от схемы
выпрямления и напряжения сети. Его
значения при частоте напряжения сети
50 Гц приведены в таблице. Для частоты
60 Гц эти значения необходимо уменьшить
на 17%.
- коэффициент, зависящий от схемы
выпрямления и напряжения сети. Его
значения при частоте напряжения сети
50 Гц приведены в таблице. Для частоты
60 Гц эти значения необходимо уменьшить
на 17%.
|
Схема выпрямителя |
Коэффициент С при напряжении сети (50 Гц) | ||
|
220 В |
380 В |
500 В | |
|
Полностью управляемый однофазный мост |
630 |
1090 |
|
|
Полууправляемый однофазный мост |
400 |
690 |
|
|
Полностью управляемый трехфазный мост |
85 |
145 |
190 |
Для имеющегося дросселя можно рассчитать коэффициент пульсаций в %:
![]()
и
коэффициент формы ![]() .
.
Мощность
двигателя: ![]() [Вт],
[Вт], ![]() [Вт]
[Вт]
где
![]() - потребляемая мощность;
- потребляемая мощность;
![]() - отдаваемая мощность (на валу, номинальная);
- отдаваемая мощность (на валу, номинальная);
![]() - среднее значение напряжения якоря
[В];
- среднее значение напряжения якоря
[В];
![]() - среднее значение тока якоря [А];
- среднее значение тока якоря [А];
![]() - КПД двигателя.
- КПД двигателя.
Щетки ДПТ SEW оптимально работают в диапазоне токов 50 – 150% от номинального значения тока якоря. Допустимо кратковременное увеличение тока до 200% от номинального. Длительная работа при токах якоря меньших, чем 50% от номинального, с одной стороны неэкономично, а с другой приводит к повышенному износу щеток (холодная коммутация). В связи с этим следует избегать необоснованного завышения мощности двигателя.
5.5. Включение и перегрузочная способность ДПТ
ДПТ SEW мощностью до 0,5 кВт могут включаться прямым включением в сеть постоянного тока. Двигатели большей мощности должны пускаться с использованием специальных способов пуска. При питании двигателя от управляемого выпрямителя пусковой ток ограничивается выпрямителем за счет плавного подъема напряжения. ДПТ вне зависимости от способа их производства и конструкции при номинальном напряжении допускают в течение 15 с момент в 1,6 раза больше номинального значения.
5.6. Охлаждение
Обычно ДПТ SEW выполняются с самовентиляцией. Поэтому на низких скоростях охлаждение двигателя оказывается недостаточным. В этом случае в зависимости от диапазона регулирования необходимо либо уменьшать мощность, либо применять независимое принудительное охлаждение. При температуре окружающей среды выше 40°С или высоте 1000 м над уровнем моря нужно соответственно уменьшать мощность двигателей так же, как это делалось у АД (см. п. 2.6)
5.7. Частота включений
В ДПТ частота включений ограничивается нагревом обмоток и условиями коммутации. поскольку при пуске ДПТ пусковой ток ограничивается на уровне двухкратного от номинального, он нагревается меньше, чем АД, при прямом пуске которого ток равен пяти- шестикратному от номинального значения. Независимое охлаждение и на низкой скорости обеспечивает достаточный отвод тепла.
Если желаемая частота включений не ограничивается нагревом обмотки, то ее граница может определяться коллектором. При большой частоте включений возможно подгорание коллектора, которое не устраняется при кратковременной нормальной работе. Это приводит к повышенному износу коллектора. В этом случае нужно руководствоваться рекомендациями производителя.
5.8. Регулирование скорости ДПТ
ДПТ независимого возбуждения имеют механическую характеристику, подобную короткозамкнутому АД. Разница скоростей при холостом ходе и под нагрузкой тем меньше, чем больше мощность двигателя. Однако эта разница скоростей в диапазоне регулирования до 1:40 может быть значительно уменьшена с помощью так называемого регулирования напряжения якоря с IR-компенсацией. IR-компенсация означает, что падение напряжения на сопротивлении якоря IR компенсируется соответствующим повышением напряжения якоря, поступающего от выпрямителя. При диапазонах регулирования больше 1:40 или при более высоких требуемых точностях регулирования применяют регулирование скорости с измерением ее фактических значений с помощью датчика скорости двигателя.
5.9. Виды защит классы изоляции, допуски
Виды защит и классы изоляции ДПТ SEW те же, что и у мотор-редукторов переменного тока за исключением IP65 и взрывоопасных.
|
Р / nH |
Допуски |
|
< 0,67 |
± 15% |
|
0,67 – 2,5 |
± 10 % |
|
2,5 – 10 |
± 7,5 % |
|
> 10 |
± 5% |