

Глава 4. Сервопривод
4.1. Понятие о сервоприводе
В современной приводной технике во многих случаях предъявляются такие высокие требования как:
точность позиционирования;
стабилизация скорости;
широкий диапазон регулирования;
стабилизация момента;
перегрузочная способность;
высокая динамика.
Сервопривод – это система привода, которая в большом диапазоне регулирования скорости обеспечивает динамичные, высокоточные процессы. В машиностроительных отраслях они были преимущественно вспомогательными. Однако ситуация изменилась, так что теперь и главные приводы реализуются с использованием сервотехники.
Принципиально перечисленных выше качеств можно добиться с использованием: ДПТ независимого возбуждения; АД с короткозамкнутым ротором; СД с возбуждением от постоянных магнитов. Сравним эти двигатели по ряду параметров.
4.2. Сравнение двигателей сервоприводов
Сравнение приводится для конкретных двигателей SEW близкой мощности и с близкой номинальной скоростью.
|
Параметры |
АД, питающийся от сети |
ДПТ |
СД с постоянными магнитами |
|
Тип/типоразмер |
DFV132M2 |
GFVN160M |
DFY112ML |
|
Мощность, кВт |
7,5 |
8,3 |
7,5 |
|
Скорость, об/мин |
2900 |
3200 |
3000 |
|
Номинальный момент, Нм |
24,7 |
24,7 |
24 |
|
Полная масса, кг |
66 |
105 |
38,6 |
|
Масса ротора, кг |
17 |
29 |
8,2 |
|
Момент инерции, кгм2 |
0,028 |
0,0496 |
0,00874 |
|
Время разгона, мс |
191 |
420 |
38 |
|
Динамика, % |
20 |
10 |
100 |
Из таблицы видно, что СД имеет наименьшую массу. Это существенное достоинство, особенно в тех случаях, когда ЭП монтируется непосредственно на перемещающемся ИО. Получаются следующие соотношения массы и номинальной мощности: АД – 8,8 кг/кВт; ДПТ – 12,7 кг/кВт; СД – 5,2 кг/кВт.
Моменты инерции особенно сильно различаются у ДПТ и СД. Малый момент инерции двигателя выгоден, если ИО имеет небольшой момент инерции, приведенный к двигателю. Однако при большом моменте инерции ИО эта особенность СД оказывается недостатком.
4.3. СД с возбуждением от постоянных магнитов
СД с возбуждением от постоянных магнитов, называемые иногда также двигателями с электронной коммутацией или бесщеточными (бесколлекторными), в наибольшей степени соответствуют требованиям, предъявляемым к серводвигателям. Их статор можно сравнить со статором АД. Шихтованный статор имеет наклеенный магнит, который обеспечивает постоянное магнитное поле ротора. СД обычно изготавливают в закрытом исполнении (IP65) с самовентиляцией. Двигатель может работать при различных способах формирования тока. В дальнейшем рассматривается метод синусной коммутации, который применяется в электроприводах SEW. Все три фазы обмотки одновременно обтекаются током от соответствующего преобразователя MOVIDYN. Ток, индуцируемое напряжение и поток синусоидальны.
Двигатели с синусоидальным током, как правило, снабжаются резольвером в качестве датчика положения. Резольвер – это электрически и механически надежный вращающийся датчик. Совершенная электронная обработка данных дает возможность определять скорость и абсолютное перемещение ротора. Дополнительная система управления вырабатывает сигнал по перемещению, идентичный сигналу, который формируется вращающимся инкодером (импульсным датчиком). Этот сигнал может использоваться для систем позиционирования. Благодаря отсутствию дополнительного импульсного датчика можно сэкономить на стоимости затрат.
4.3.1. Устройство и принцип действия
СД
– это двигатель с вращающимся магнитным
полем, у которого поля статора и ротора
вращаются синхронно. Благодаря
пространственному распределению обмотки
статора и чередованию во времени фаз
входного тока, создается вращающееся
поле статора. Частота вращения поля
![]() определяется
формулой
определяется
формулой
![]() ,
где
,
где
![]() - частота напряжения питания;
- частота напряжения питания;
![]() - число пар полюсов.
- число пар полюсов.
Двигатели
SEW
всегда выполняются как шестиполюсные
(![]() =3).
Зависимость между скоростью и частотой
для них приведена в таблице.
=3).
Зависимость между скоростью и частотой
для них приведена в таблице.
|
|
100 |
150 |
225 |
|
|
2000 |
3000 |
4500 |
Такое число полюсов принято потому, что потери в железе при скорости 3000 об/мин малы и одновременно может быть достигнуто хорошее постоянство момента при малом значении потока возбуждения.
Статор,
как и в АД, состоит из корпуса, шихтованного
пакета магнитопровода и статорной
обмотки. Обмотка статора СД SEW
обычно соединена в звезду и ее нулевая
точка недоступна. Ротор состоит из вала,
листов стали и приклеенных постоянных
магнитов. Чтобы обеспечить высокую
динамику, листы ротора выполняются не
сплошными, а имеют пазы. Благодаря этому
уменьшается момент инерции ротора и,
соответственно, время разгона двигателя.
При изготовлении двигателей используется
сплав ниодима, железа и бора. Магниты
из этого сплава имеют лучшие по сравнению
с ферритовыми магнитные свойства и
могут создавать больший вращающий
момент. Если СД работает с постоянной
частотой подводимого напряжения, то
скорость ротора равна скорости вращения
поля статора. Если двигатель нагружать,
то произойдет сдвиг вращающегося поля
ротора от вращающегося поля статора на
определенный угол, н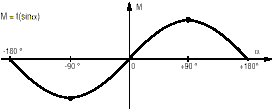 азываемый
углом синхронизации
азываемый
углом синхронизации
![]() .
Зависимость момента от угла синхронизации
представлена на рис. 4. При
.
Зависимость момента от угла синхронизации
представлена на рис. 4. При
![]() момент двигателя максимален. При
дальнейшем
момент двигателя максимален. При
дальнейшем
Рис. 4. Зависимость момента от угла синхронизации ротора СД при постоянной частоте
увеличении угла двигатель перегружается, его момент уменьшается, двигатель выпадает из синхронизма и останавливается.
4.3.2. Управление двигателем
Для того, чтобы СД
мог работать с возможно большим моментом,
нужно чтобы угол
![]() всегда
составлял 90 электрических градусов. В
этом случае в двигательном режиме поле
статора будет постоянно опережать а в
генераторном режиме отставать от поля
ротора на 90 электрических градусов.
Задача управления двигателем от
сервопреобразователя, таким образом,
состоит в том, что по заранее заданному
моменту нужно рассчитать значения трех
фазных токов двигателя, а затем установить
их для распределения по обмоткам статора.
всегда
составлял 90 электрических градусов. В
этом случае в двигательном режиме поле
статора будет постоянно опережать а в
генераторном режиме отставать от поля
ротора на 90 электрических градусов.
Задача управления двигателем от
сервопреобразователя, таким образом,
состоит в том, что по заранее заданному
моменту нужно рассчитать значения трех
фазных токов двигателя, а затем установить
их для распределения по обмоткам статора.
Для этого с помощью датчика положения определяется положение ротора. К полученной величине угла положения в сервопреобразователе в зависимости от направлений скорости и момента прибавляется или вычитается 90 электрических градусов и рассчитываются соответствующие этому положению токи.
Д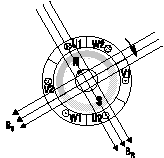 ля
каждого положения ротора определяется
соответствующее положение системы
токов статора, т.е. ротор определяет
направление системы токов статора. У
упоминавшихся в этой связи углов
синхронизации
ля
каждого положения ротора определяется
соответствующее положение системы
токов статора, т.е. ротор определяет
направление системы токов статора. У
упоминавшихся в этой связи углов
синхронизации
![]() это трактуется как электрический угол,
которому в шестиполюсном двигателе 90
электрическим градусам соответствует
30 механических градусов.
это трактуется как электрический угол,
которому в шестиполюсном двигателе 90
электрическим градусам соответствует
30 механических градусов.
Рис. 5. Линии магнитных полей статора и ротора
4.3.3. Механические характеристики
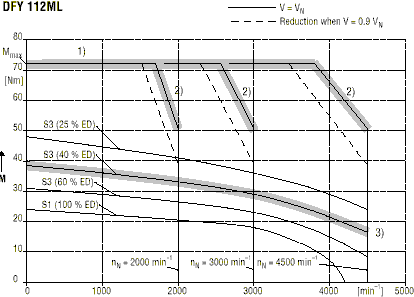
У механических характеристик рассматриваемого серводвигателя очевидны три границы, которые должны приниматься во внимание при проектировании привода (рис. 6)
Максимальный момент двигателя ограничивается нагрузочной способностью постоянного магнита. Если двигатель нагружен слишком сильно и ток возрастает до больших значений, то магнит размагничивается и двигатель "теряет свой момент". При правильном выборе и согласовании двигателя и преобразователя размагничивания можно не допустить.
Ограничение момента в верхней части диапазона скоростей определяется напряжением на зажимах. Оно зависит от напряжения промежуточного контура и падения напряжения в подводящих проводах. Из-за действия противо-ЭДС не удается поддерживать максимальный ток. Этим и определяется уменьшение момента.
С
 ледующая
граница – это термическая перегрузка
двигателя. При проектировании
рассчитывается эквивалентное значение
момента двигателя. Он может быть меньше
момента трогания. Нужно иметь в виду,
что превышение термической границы
может привести к размагничиванию
магнита или повреждению изоляции.
ледующая
граница – это термическая перегрузка
двигателя. При проектировании
рассчитывается эквивалентное значение
момента двигателя. Он может быть меньше
момента трогания. Нужно иметь в виду,
что превышение термической границы
может привести к размагничиванию
магнита или повреждению изоляции.
Рис. 6. Механические характеристики серводвигателя DFY112ML
4.3.4. Резольвер
Р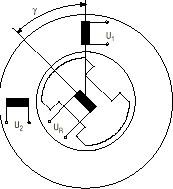 езольвер
(англ.resolver)
работает по принципу вращающегося
трансформатора. У вращающегося
трансформатора ротор состоит из катушки
(обмотки), которая вместе с обмоткой
статора образует трансформатор.
Принципиально резольвер устроен точно
так же с той лишь разницей, что статор
выполнен не из одной, а из двух расположенных
под углом 90° друг к другу обмоток.
Резольвер служит для определения
абсолютного положения вала двигателя
внутри одного оборота. Кроме того, по
сигналу резольвера определяется значение
скорости и моделируется инкрементный
датчик для регулирования положения.
Ротор резольвера закреплен на валу
двигателя. Для того чтобы можно было
передавать переменное несущее напряжение
на ротор без щеток, на статоре и роторе
размещены дополнительные обмотки. По
двум выходным синусоидальным напряжениям
езольвер
(англ.resolver)
работает по принципу вращающегося
трансформатора. У вращающегося
трансформатора ротор состоит из катушки
(обмотки), которая вместе с обмоткой
статора образует трансформатор.
Принципиально резольвер устроен точно
так же с той лишь разницей, что статор
выполнен не из одной, а из двух расположенных
под углом 90° друг к другу обмоток.
Резольвер служит для определения
абсолютного положения вала двигателя
внутри одного оборота. Кроме того, по
сигналу резольвера определяется значение
скорости и моделируется инкрементный
датчик для регулирования положения.
Ротор резольвера закреплен на валу
двигателя. Для того чтобы можно было
передавать переменное несущее напряжение
на ротор без щеток, на статоре и роторе
размещены дополнительные обмотки. По
двум выходным синусоидальным напряжениям
![]() и
и
![]() ,
сдвинутым на 90° (рис. 7), можно определить
угол поворота ротора, скорость и
инкрементный сигнал по положению
(моделирование инкрементного датчика).
,
сдвинутым на 90° (рис. 7), можно определить
угол поворота ротора, скорость и
инкрементный сигнал по положению
(моделирование инкрементного датчика).
4.4. Сервопреобразователь MOVIDYN
Цифровой сервопреобразователь MOVIDYN служит для регулирования скорости и момента серводвигателя. Сервопреобразователи MOVIDYN выпускаются в двух исполнениях: модульном, предназначенном для многодвигательного привода, и компактном. Компактное исполнение имеет то преимущество, что сервопривод представляет полный комплект. В то же время имеется возможность для дополнительного электрического монтажа между отдельным компонентами, которые необходимы в модульных системах. Компактные преобразователи предназначены главным образом для отдельных, небольших приводов. Они обладают всеми функциями модульной сервотехники, исключая возврат энергии в сеть. Достоинство модульного исполнения (сетевой и осевой модули) проявляется в многодвигательном приводе, в котором можно к одному сетевому модулю подключать несколько осевых модулей. При этом мощность сетевого модуля является выходной мощностью и определяется суммой мощностей подключенных осевых модулей.
4.4.1. Сетевой модуль MOVIDYN
Сетевой модуль состоит их входного выпрямителя, промежуточного контура постоянного напряжения сервопреобразователя, тормозного прерывателя или устройства возврата энергии в сеть, сетевого выключателя, который выполняет функции защиты, и устройства сопряжения.
При торможении привода кинетическая энергия превращается в электрическую и передается в промежуточный контур. Т.к. емкость конденсатора промежуточного контура ограничена, напряжение промежуточного контура повышается. Для того чтобы привод мог тормозиться, нужно гарантировать отвод энергии. Это необходимо, потому что избыточная энергия будет накапливаться или превращаться в другие виды энергии. Для этого принципиально имеется три возможности:
Отдача энергии в сеть
Тормозной прерыватель и тормозное сопротивление (преобразование энергии в тепло)
Обмен энергии в многодвигательном приводе (использование электрической энергии подключенных двигателей)
С помощью сетевого модуля MOVIDYN можно реализовать любой из названных вариантов.
4.4.2. Осевой модуль MOVIDYN
Осевой модуль подключается к сетевому через токовые шины и шину данных. Осевой модуль содержит инвертор, от которого питается серводвигатель. Осевые модули могут использоваться в режимах регулирования скорости или момента. Они формируют синусоидальный выходной ток, так что даже при малых скоростях гарантируется точное вращение с малыми пульсациями момента. Одновременно минимизируются потери в двигателе и обеспечивается хорошее использование двигателя по мощности. Параметрирование осевого модуля и карты опций осуществляется с помощью ПК через стандартный интерфейс RS-232 или управления от ЭВМ верхнего уровня через интерфейс RS-485.
Модель инкрементного датчика
Из выходных сигналов
резольвера создается 6 выходных сигналов,
которые используются управлением
верхнего уровня для позиционирования.
Выходы этих каналов А, В и С (рис. 8) и их
инверсные сигналы. Модель инкрементного
датчика выдает 1024 импульса на один
оборот. Они позволяют системе управлением
позиционирования с помощью импульсного
умножителя частоты удваивать или
учетверять разрешающую способность.
Тем самым можно один оборот двигателя
разделить на 4096 импульсов. Импульсы
каналов А и В сдвинуты относительно
друг друга на 90 электрических градусов.
При движении направо положительные
фронты импульсов канала А опережают
т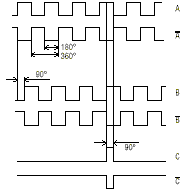 акие
же импульсы канала В и наоборот. Канал
С за каждый полный оборот вала двигателя
выдает один импульс, который можно
использовать как опорный сигнал.
акие
же импульсы канала В и наоборот. Канал
С за каждый полный оборот вала двигателя
выдает один импульс, который можно
использовать как опорный сигнал.
Рис. 8. Моделирование инкрементного датчика