

Практика аэп
ЛИТЕРАТУРА
-
Drive Engineering – Practical Implementation – Volume 1: Drive Arrangements with SEW Geared Motors. Calculation Methods and Examples. SEW-EURODRIVE. Edition 06/98.
Глава 1. Введение
SEW-EURODRIVE является ведущим предприятием на мировом рынке ЭП. Штаб-квартира находится в Брухзале, Германия. Производственные предприятия в Германии, Франции, США, Бразилии и Китае. Сборочные заводы в более чем 30 индустриально развитых странах мира. Представительства в более чем 50 странах.
Диапазон регулирования и выбор привода
Если в наиболее распространенном диапазоне мощностей до 45 кВт требуется иметь одну или две ступени скоростей, то для этого может быть использован питающийся от сети односкоростной или с переключением полюсов мотор-редуктор переменного тока. В малом диапазоне – до 1:8 имеется возможность использования двигателя с механическим вариатором (SEW: VARIBLOC или VARIMOT). При более чем двух- и бесступенчатом регулировании скорости в большом диапазоне (до 1:100) используются приводы с электронным регулированием (SEW: MOVITRAC или MOVIDYN), а также приводы постоянного тока. Еще больший диапазон (до 1:10000) может быть достигнут СД, работающим в режиме вентильного двигателя.
Глава 2. Эп перменного тока с одной или несколькими фиксированными скоростями
2.1. Принцип действия АД с короткозамкнутым ротором
Благодаря простой, не требующей обслуживания конструкции, высокой надежности и небольшой цене, АД с короткозамкнутым ротором является наиболее распространенным типом двигателя.
На статоре двигателя располагается трехфазная обмотка, при подключении которой к источнику трехфазного напряжения образуется вращающееся магнитное поле. Его синхронная скорость определяется по формуле
![]() ,
,
где
![]() -
частота напряжения питания, Гц;
-
частота напряжения питания, Гц;
![]() -
число пар полюсов обмотки статора.
-
число пар полюсов обмотки статора.
При
пересечении магнитным полем проводников
короткозамкнутой обмотки ротора, в них
индуцируется ЭДС, под действием которой
в роторе протекает ток. В результате
взаимодействия поля статора с током
ротора создается приложенный к ротору
электромагнитный момент, который
заставляет ротор вращаться со скоростью
![]() ,
несколько меньшей скорости поля
,
несколько меньшей скорости поля
![]() .
Величина
.
Величина
![]() называется скольжением. Электромагнитный
момент с определенной степенью точности
может быть определен по формуле
называется скольжением. Электромагнитный
момент с определенной степенью точности
может быть определен по формуле
 ,
,
где
![]() - напряжение на статоре;
- напряжение на статоре;
![]() - активное сопротивление фазы статора
и приведенное к статору сопротивление
фазы ротора;
- активное сопротивление фазы статора
и приведенное к статору сопротивление
фазы ротора;
![]() - индуктивное сопротивление К.З.
- индуктивное сопротивление К.З.
Анализ этого выражения показывает, что при некотором значении скольжения, называемом критическим
![]()
момент достигает своего максимального (критического) значения
 .
.
Подставив
![]() ,
т. е.
,
т. е.
![]() ,
можно
из выражения для
,
можно
из выражения для
![]() определить значение пускового момента.
Однако, для увеличения пускового момента
обычно принимают специальные конструктивные
меры, благодаря которым пусковой момент
больше, чем определенный по приведенной
формуле для
определить значение пускового момента.
Однако, для увеличения пускового момента
обычно принимают специальные конструктивные
меры, благодаря которым пусковой момент
больше, чем определенный по приведенной
формуле для
![]() .
Поскольку значения
.
Поскольку значения
![]() ,
а следовательно и
,
а следовательно и
![]() ,
зависят от числа пар полюсов, есть
возможность получать несколько
фиксированных значений скорости,
переключая обмотку статора так, чтобы
изменять число пар полюсов
,
зависят от числа пар полюсов, есть
возможность получать несколько
фиксированных значений скорости,
переключая обмотку статора так, чтобы
изменять число пар полюсов
![]() .
Такие двигатели дешевле приводов с
регулированием скорости и поэтому часто
используются в приводах перемещения и
подъема. При этом высокая скорость
служит для быстрых перемещений, а низкая
для позиционирования.
.
Такие двигатели дешевле приводов с
регулированием скорости и поэтому часто
используются в приводах перемещения и
подъема. При этом высокая скорость
служит для быстрых перемещений, а низкая
для позиционирования.
2.2. Номинальные данные АД с короткозамкнутым ротором
Основными
данными являются: типоразмер, номинальные
мощность, скорость, ток и напряжение,
![]() ,
относительная продолжительность
включения, тип защиты и класс изоляции.
В соответствии с VDE
0530 эти данные приводятся при температуре
окружающей среды 40°С и максимальной
высоте над уровнем моря 1000 м.
,
относительная продолжительность
включения, тип защиты и класс изоляции.
В соответствии с VDE
0530 эти данные приводятся при температуре
окружающей среды 40°С и максимальной
высоте над уровнем моря 1000 м.
Односкоростные асинхронные мотор-редукторы обычно выполняются как 4-полюсные, т.к. 2-полюсные имеют повышенный шум и меньший срок службы редуктора. 4-полюсная обмотка соответствует синхронной скорости двигателя 1500 об/мин при частоте сети 50 Гц. При одной и той же мощности размеры двигателя тем больше, чем больше чило полюсов.
2.3.
КПД и
![]()
На
табличке двигателя в качестве номинальной
указывается отдаваемая мощность, т.е.
мощность на валу двигателя. У больших
двигателей КПД и
![]() выше, чем у двигателей малой мощности.
Как
выше, чем у двигателей малой мощности.
Как
![]() ,
так и КПД зависят от степени загрузки
двигателя, ухудшаясь при ее уменьшении,
как это показано в табл. на примере
двигателя SEW
DV132S4 5.5 кВт
,
так и КПД зависят от степени загрузки
двигателя, ухудшаясь при ее уменьшении,
как это показано в табл. на примере
двигателя SEW
DV132S4 5.5 кВт
|
|
1/4 |
1/2 |
3/4 |
1 |
5/4 |
|
|
0,44 |
0,67 |
0,79 |
0,85 |
0,87 |
|
|
0,79 |
0,84 |
0,86 |
0,85 |
0,82 |
Полная
электрическая потребляемая мощность:
![]()
Активная
электрическая потребляемая мощность:
![]()
Механическая
мощность на валу:
![]()
2.4. Классы изоляции
|
Класс изоляции |
Допустимый нагрев по EN 60034, °С |
Допустимый нагрев по ГОСТ 8805-87, °С |
|
B |
120 |
130 |
|
F |
145 |
155 |
|
H |
165 |
180 |
Наиболее часто двигатели выпускаются с классом изоляции В. По желанию для всех АД SEW может быть применена изоляция F и Н. Все двигатели с переключением числа полюсов с раздельными обмотками выпускаются с изоляцией класса F.
Используя омметр, можно определить значение температуры обмотки из медного провода через значение ее сопротивления (при постоянной температуре окружающей среды):
![]()
где
![]() - температура холодной обмотки;
- температура холодной обмотки;
![]() - температура обмотки в конце испытаний;
- температура обмотки в конце испытаний;
![]() - сопротивление холодной обмотки;
- сопротивление холодной обмотки;
![]() - сопротивление в конце испытаний.
- сопротивление в конце испытаний.
2.5. Допуски по EN 60034
|
Напряжение и частота |
допуск А |
|
КПД при
|
|
|
Коэффициент мощности |
|
|
Скольжение:
при
при
|
± 20% ± 30% |
|
Пусковой ток |
+ 20% |
|
Пусковой момент |
от – 15% до + 25% |
|
Критический момент |
- 10% |
|
Момент инерции |
± 10% |
2.6. Уменьшение мощности в зависимости от температуры окружающей среды и высоты над уровнем моря
Номинальная
мощность двигателя зависит от температуры
окружающей среды и высоты над уровнем
моря. Номинальная мощность указана в
табличке двигателя для температуры
окружающей среды 40°С и высоты над уровнем
моря не более 1000 м. При отклонении от
этих значений номинальную мощность
двигателя надо уменьшать соответственно
следующей формуле:
![]() .
.
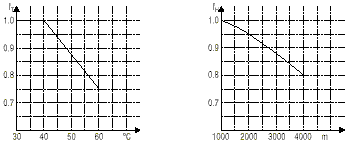
Рис. 1. Уменьшение допустимой мощности двигателя в зависимости от температуры окружающей среды и высоты над уровнем моря
2.7. Режимы работы по EN 60034 (соответствует ГОСТ 17154-71)
Обычное исполнение рассчитано на установившийся режим S1, т.е. режим с постоянной нагрузкой, длительности которого достаточно, чтобы двигатель достиг установившегося теплового состояния.
S2 – кратковременный режим - это режим с постоянным уровнем нагрузки при ограниченном времени включения и последующей паузой, за время которой двигатель вновь достигает температуры окружающей среды.
S3 – повторно-кратковременный режим без влияния процессов пуска на нагрев двигателя. он характеризуется относительной продолжительностью включения (ПВ). Цикл S3 состоит из однородных чередующихся рабочих участков с одинаковой нагрузкой и пауз, в течение которых двигатель неподвижен.
S4 – повторно-кратковременный режим с влиянием процессов пуска на нагрев двигателя. он характеризуется относительной продолжительностью включения и частотой включений.
Имеются также режимы S5 – S10 с условиями, частично аналогичными S1 – S4.
Если двигатель рассчитан на режим S1 с ПВ 100%, но предназначается для использования с меньшей ПВ, мощность на валу двигателя может быть увеличена в соответствии с табл.
|
Режим работы |
Коэф. увеличения мощн. |
|
|
S2 |
Продолжительность работы 60 мин 30 мин 10 мин |
1,1 1,2 1,4 |
|
S3 |
Относительная ПВ 60% 40% 25% 15% |
1,1 1,15 1,3 1,4 |
![]() -
отношение времени работы под нагрузкой
ко времени цикла. Максимальное время
цикла 10 минут.
-
отношение времени работы под нагрузкой
ко времени цикла. Максимальное время
цикла 10 минут.
2.8. Защита обмотки
Выбор правильного защитного устройства в значительной степени определяет надежность работы двигателя. Различают защитные устройства, действующие в зависимости от тока и от температуры двигателя. В качестве токовой защиты используются ПП или АВ. Температурозависящими защитными устройствами являются температурные зонды (позисторы) или биметаллические выключатели (термостаты).
Три температурных зонда включаются последовательно и через клеммную коробку выводятся на специальный отключающий аппарат в распределительном шкафу. Три выключателя с биметаллическими пластинами, также включенные в двигатель последовательно, через клеммную коробку включаются прямо в цепь управления двигателем.
Температурные зонды или термопары срабатывают при предельно допустимой температуре обмотки. Они обладают тем достоинством, что измеряют температуру непосредственно в обмотке. Плавкие же предохранители защищают двигатель не от перегрузок, а исключительно от короткого замыкания. Автоматические выключатели обеспечивают достаточную защиту от перегрузки при нормальной работе с небольшой частотой включений, коротким временем разгона и малым пусковым током. Для приводов с большой частотой включений (>60 циклов в час) и механизмов с тяжелым пуском такая защиты неприменима. Если тепловая постоянная времени двигателя и автомата не согласованы, то при уставке, выбранной по номинальному току, может произойти слишком раннее или слишком позднее отключение.
2.9. Виды защит двигателей переменного тока см. Приложение
2.10. Выбор двигателя по моменту нагрузки, моменту инерции и частоте включений
Каждый двигатель рассчитывается на определенную термическую нагрузку. В случае режима S1 номинальная мощность двигателя равна требуемой мощности.
В приводах с высокой частотой включений при небольших моментах нагрузки (например, привод перемещения) решающим является не требуемая мощность, а число пусков двигателя. При частых включениях каждый раз протекает большой ток и двигатель перегревается.
Допустимая
частота включений указывается
производителем как частота включений
вхолостую
![]() двигателя без нагрузки и с моментом
инерции только самого ротора
двигателя без нагрузки и с моментом
инерции только самого ротора
![]() при ПВ=50%. Допустимая частота включений
в каждом конкретном случае может быть
приближенно определена по формуле
при ПВ=50%. Допустимая частота включений
в каждом конкретном случае может быть
приближенно определена по формуле
![]()
г де
де
![]() - расчетные коэффициенты, которые могут
быть определены из рис. 2.
- расчетные коэффициенты, которые могут
быть определены из рис. 2.
Рис. 2. Зависимость частоты включений от дополнительного момента инерции, момента при разгоне, статической мощности и ПВ. На рисунке обозначены:
![]() -
момент инерции двигателя;
-
момент инерции двигателя;
![]() - сумма всех внешних моментов инерции,
приведенных к валу двигателя;
- сумма всех внешних моментов инерции,
приведенных к валу двигателя;
![]() - момент инерции тяжелого вентилятора;
- момент инерции тяжелого вентилятора;
![]() - момент сопротивления при пуске;
- момент сопротивления при пуске;
![]() - пусковой момент двигателя; cdf
– ПВ;
- пусковой момент двигателя; cdf
– ПВ;
![]() - статическая (установившаяся) мощность;
- статическая (установившаяся) мощность;
![]() - номинальная мощность двигателя.
- номинальная мощность двигателя.
2.11. Плавность пуска и переключений АД с короткозамкнутым ротором
На момент АД можно влиять:
-
включением внешних дросселей или сопротивлений
-
снижением напряжения
-
переключением статорных обмоток со звезды на треугольник (момент 1/3 номинала)
-
с помощью пускового трансформатора, соответствующих дросселей и сопротивлений
-
переключение на две фазы
 (нельзя использовать в механизмах
подъема по соображениям безопасности)
(нельзя использовать в механизмах
подъема по соображениям безопасности) -
использование электронных плавных переключателей (WPU по обозначению SEW), которые при помощи электроники разрывают три фазы, а затем через соответствующее время снова включают
2.12. Двигатели со встроенными тормозами
В случаях, когда требуется относительно точное позиционирование, двигатель может быть дополнительно оснащен механическим тормозом. Кроме этого применения, в котором механический тормоз используется как рабочий, используются также двигатели со встроенными тормозами, если это вызывается требованиями безопасности (например, в приводе подъема). Дисковые тормоза возбуждаются постоянным током и в возбужденном состоянии растормаживают двигатель. При отключении двигателя или при исчезновении напряжения тормоз накладывается автоматически усилием пружины.
Тормозной момент дискового тормоза варьируется соответствующим выбором пружин и их количеством. При заказе двигателя необходимо соответственно требованиям выбрать по каталогу желаемый тормозной механизм. Например, по соображениям безопасности в механизмах подъема тормозной момент нужно выбирать примерно вдвое больше требуемого номинального момента двигателя.
Тормоз может дополнительно растормаживаться механически. Для этого на тормозе монтируется рычаг с самовозвратом или резьбовая шпилька для фиксации тормоза в освобожденном состоянии. Для таких особых условий как, например, работа на открытом воздухе, требуется защищать тормоза от замерзания. Для этого существует специальное устройство.
Торможение противовключением или реверс двигателя при максимальной скорости создает для двигателя большую механическую и термическую перегрузку. Механическая перегрузка действует и в следующих за ним редукторах и передаточных элементах. Двигатели без тормозов при электродинамическом торможении с питанием статора постоянным током можно более или менее тормозить в зависимости от величины постоянного тока. При этом виде торможения происходит дополнительный нагрев двигателя, что необходимо учитывать.