

3.3. Расчет механических характеристик электропривода.
Запишем выражения для момента АД, подставляя в него значения параметров с учетом частоты питающего напряжения:
![]()
 (3.8)
(3.8)
В результате элементарных преобразований выражения (3.8), подставив в него (3.5), получим окончательное выражение для построения механической характеристики:
 (3.9)
(3.9)
Подставив различные значения частоты
питающего напряжения
![]() и скорости от 0 до ω0(f) в
формулу (3.9), получим значения момента
для механических характеристик при
различных частотах (табл. 3.2).
и скорости от 0 до ω0(f) в
формулу (3.9), получим значения момента
для механических характеристик при
различных частотах (табл. 3.2).
Табл. 3.2.
|
50 Гц |
ω |
0 |
15 |
30 |
45 |
60 |
75 |
85 |
95 |
104 |
|
M |
37,73 |
43,59 |
51,56 |
62,92 |
80,14 |
107,81 |
133,38 |
142,80 |
25,33 | |
|
40 Гц |
ω |
0 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
|
M |
57,17 |
64,14 |
72,97 |
84,45 |
99,80 |
120,86 |
149,25 |
176,52 |
108,54 | |
|
30 Гц |
ω |
0 |
10 |
20 |
30 |
40 |
45 |
50 |
55 |
60 |
|
M |
95,41 |
110,36 |
130,32 |
157,55 |
193,71 |
212,91 |
224,93 |
207,82 |
112,62 | |
|
20 Гц |
ω |
0 |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
|
M |
182,71 |
199,92 |
219,96 |
243,02 |
268,54 |
293,33 |
306,19 |
273,08 |
115,73 | |
|
10 Гц |
ω |
0 |
4 |
8 |
10 |
12 |
14 |
16 |
18 |
20 |
|
M |
405,16 |
435,96 |
460,29 |
465,14 |
459,74 |
436,83 |
384,78 |
286,11 |
117,68 |
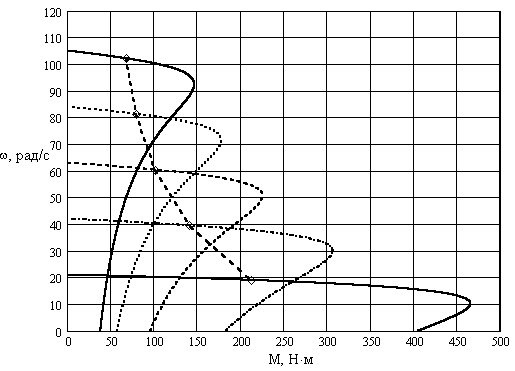
Рис. 3.3. Механические характеристики и статический момент Mc(f)=0,45Mкр(f)
4. Энергетические характеристики электропривода
4.1. Расчет потерь в электроприводе.
Суммарные потери состоят из постоянных потерь, и потерь переменных.
Суммарные потери:
![]() (4.1)
(4.1)
где
![]() – постоянные потери;
– постоянные потери;
![]() – переменные потери.
– переменные потери.
К постоянным потерям отнесем потери механические и потери в меди статора от намагничивающего тока:
![]()
Механические потери:
 , (4.2)
, (4.2)
где
![]() ;
;
![]() - найдем из формулы (3.5);
- найдем из формулы (3.5);
![]() - номинальная паспортная мощность
двигателя.
- номинальная паспортная мощность
двигателя.
Потери в меди статора:
![]() (Вт); (4.3)
(Вт); (4.3)
Переменные потери определим из выражения:
 ; (4.3)
; (4.3)
4.2. Расчет кпд
К. п. д. системы рассчитаем по формуле:
![]() ; (4.7)
; (4.7)
где М – момент нагрузки;
ω – скорость рабочей точки;
![]() – суммарные потери в системе.
– суммарные потери в системе.
Результаты расчетов занесем в табл. 4.1.
Табл. 4.1.
|
50 Гц |
ω |
5 |
15 |
30 |
45 |
60 |
75 |
85 |
100 |
104 |
|
η |
0,016 |
0,052 |
0,117 |
0,198 |
0,304 |
0,450 |
0,580 |
0,853 |
0,895 | |
|
40 Гц |
ω |
5 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
|
η |
0,027 |
0,055 |
0,119 |
0,193 |
0,281 |
0,387 |
0,517 |
0,679 |
0,877 | |
|
30 Гц |
ω |
5 |
10 |
20 |
30 |
40 |
45 |
50 |
55 |
60 |
|
η |
0,047 |
0,097 |
0,209 |
0,341 |
0,496 |
0,584 |
0,682 |
0,787 |
0,892 | |
|
20 Гц |
ω |
1 |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
|
η |
0,018 |
0,091 |
0,188 |
0,291 |
0,401 |
0,519 |
0,644 |
0,776 |
0,896 | |
|
10 Гц |
ω |
2 |
6 |
8 |
10 |
12 |
14 |
16 |
18 |
20 |
|
η |
0,087 |
0,264 |
0,355 |
0,447 |
0,540 |
0,634 |
0,727 |
0,816 |
0,867 |
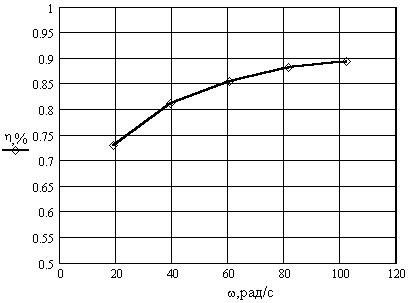
Рис. 4.1. Зависимость КПД=f(ω) при Mс(f)=0,45Mкр(f)