Действующее значение трансформаторной эдс
![]()
где ƒ— частота магнитного поля;
wc — число витков секции.
Условием линейной коммутации будет
![]()
12.15.5. Чтобы уменьшить трансформаторную ЭДС, сокращают число витков в секции (wc). Но, чтобы сохранить вращающий момент, увеличивают количество секций. Поэтому коллекторные двигатели переменного тока имеют много секций, а также коллектор с большим количеством пластин. Уменьшить еТ можно также уменьшением магнитного потока.
Однако, чтобы сохранить вращающий момент, увеличивают число пар полюсов. Поэтому коллекторные двигатели переменного тока обычно имеют много пар полюсов. Силу тока короткого замыкания, который возникает в секции, ограничивают сопротивлением, включенным в эту секцию. Ток якоря протекает через такое сопротивление лишь во время коммутации (рис. 12.35). |
|

12.15.6. Показатели двигателя при работе на переменном токе хуже, чем показатели работы на постоянном токе. В универсальном двигателе при питании от источника синусоидального тока используется только часть обмотки возбуждения.
Реакция якоря коллекторного двигателя переменного тока имеет пульсирующий характер. Для компенсации явления реакции якоря, кроме дополнительных полюсов, всегда используют компенсационные обмотки. Практически все коллекторные двигатели переменного тока имеют компенсационные обмотки.
13.1. Классификация и назначение
13.1.1. Электрические машины малой мощности (от единиц до нескольких сотен ватт) называются микромашинами. Электрические микромашины применяются в системах управления и регулирования, бытовых приборах, гироскопических устройствах, в устройствах вычислительной техники. Электрические микромашины дают возможность решать задачу комплексной механизации и автоматизации производственных процессов.
13.1.2. Есть несколько принципов классификации электрических микромашин. Микромашины общего применения — это обычно двигатели малой мощности постоянного и переменного тока. Микромашины автоматических устройств и приборов выполняют, кроме того, такие функции, как измерение угла, скорости и ускорения, преобразование напряжения, частоты и т. п.
Поэтому электрические микромашины можно разделить на такие группы
электрические микродвигатели;
информационные микромашины;
преобразователи и усилители мощности.
13.2. Коллекторные микромашины постоянного тока
13.2.1. Электрические микродвигатели можно классифицировать следующим образом:
коллекторные микродвигатели постоянного,
переменного тока и универсальные;
асинхронные;
синхронные.
13.2.2. Микродвигатели постоянного тока используют в различных приводах автоматических устройств. Двигатели, превращающие электрическую энергию (энергию электрического сигнала) в механическое перемещение вала, называются исполнительными двигателями постоянного тока.
Такие двигатели имеют якорь обычного типа или полый, или гладкий, или дисковый, или цилиндрический с печатной обмоткой.
13.2.3. Распространен микродвигатель с якорем обычного типа. Эта машина конструктивно не отличается от двигателя постоянного тока общепромышленного исполнения, но имеет малую мощность. Корпус и полюсы статора шихтуются в виде одного пакета. Обмотка якоря присоединяется к коллектору, ток подается с помощью щеточно-коллекторного узла. Такой двигатель и по характеристикам почти не отличается от двигателей общепромышленного исполнения.
Есть машины с возбуждением от постоянных магнитов. На статоре этих двигателей расположен постоянный магнит цилиндрической формы или несколько магнитов. В исполнительных двигателях магнитную систему делают ненасыщенной. В этом случае реакция якоря не влияет на магнитный поток машины, т. е. и на частоту вращения вала.
13.2.4. Конструкция двигателя постоянного тока с полым немагнитным якорем (рис. 13.1) включает в себя подвижные части — вал 1, полый якорь 2 и коллектор 3. В полости якоря расположен сердечник 4, который называется внутренним статором (неподвижный). На статоре находится обмотка возбуждения 5 с сердечником 6. Это — внешний статор.
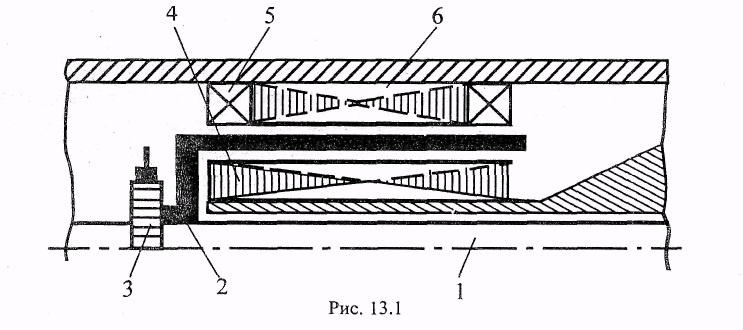
Полый якорь представляет собой пластмассовый стакан, в который запрессована обмотка якоря. Обмотка может наноситься также на поверхность полого якоря печатным методом.
У такой конструкции есть преимущества перед обычным коллекторным двигателем постоянного тока:
якорь имеет очень малую инерционность;
у якоря нет ферромагнитных участков, поэтому влияние реакции якоря незначительно;
из-за отсутствия радиальных сил притяжения якоря к статору уменьшается момент трения и соответственно механические потери двигателя;
якорь не имеет зубцов, поэтому индукция в зазоре распределяется равномерно, что исключает возникновение пульсаций.
13.2.5. Для еще большего уменьшения инерции подвижных частей используют микродвигатели с дисковым якорем. Якорь представляет собой тонкий неметаллический диск с печатной обмоткой. Как коллектор работают неизолированные участки проводников, расположенные на поверхности диска. Дисковые и полые якори изготовляют также из -алюминия.
Двигатели с дисковым якорем недолговечны вследствие износа меди печатных проводников в месте расположения щеток. Двигатели с полым и дисковым якорем менее надежны при вибрациях и ударах.
КПД двигателей с полым и дисковым якорем, почти такой же, как КПД микродвигателя постоянного тока с барабанным якорем (0,3...0,45).
13.2.6. В исполнительных микродвигателях постоянного тока
|
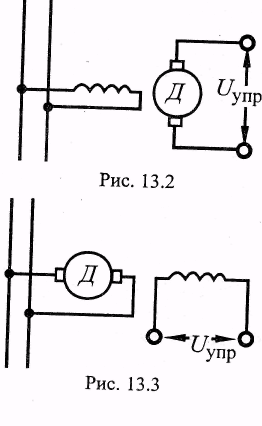
обмотка возбуждения не присоединяется к обмотке якоря, и микромашины используют как двигатели постоянного тока независимого возбуждения. Поэтому регулировать скорость вращения вала можно таким путем: изменением напряжения управления на обмотке якоря (якорное управление, рис. 13.2); изменением напряжения управления на обмотке возбуждения (полюсное управление, рис. 13.3).
|
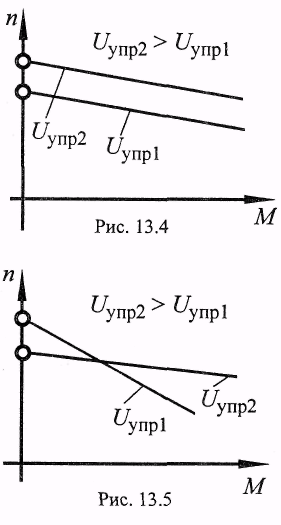
В соответствии с законом регулирования обычных двигателей постоянного тока с независимым возбуждением при якорном управлении механическая характеристика двигателя не меняет линейности характера (рис. 13.4). Якорное управление устраняет возникновение самохода двигателя. Полюсное управление микродвигателем вызывает как изменение скорости вращения вала, так и наклон кривых механической характеристики (рис. 13.5). При полюсном управлении (сравнительно с якорным) потребляется меньшая мощность управления, но изменяется жесткость механической характеристики.
|
|
13.2.7. Ряд микромашин выполняют без обмотки якоря, с постоянными магнитами. В этом случае в пустоты полого якоря (рис. 13.1) вместо сердечника 4 размещают постоянный магнит, а ротор выполняют без обмотки. При этом можно применять только полюсное управление.
13.2.8. Тахогенератором называют электрическую машину, которая преобразует энергию вращения вала в электрический сигнал.
Конструкция тахогенератора постоянного тока не отличается от конструкции микродвигателя постоянного тока. Якорь может быть обычным барабанным, или полым, или дисковым с печатной обмоткой. Тахогенератор может иметь постоянные магниты или независимое возбуждение. Ток возбуждения поддерживается постоянным.
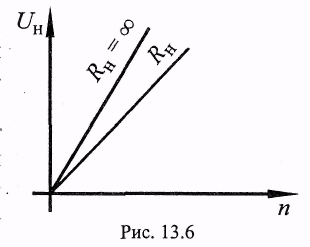
Основной является выходная характеристика тахогенератора — зависимость напряжения на нагрузке от скорости вращения вала.
Обычно ЭДС генератора постоянного тока
л
|
|