

3.Принципы построения цифровых измерительных приборов
3.1. Математические основы цифровой измерительной техники
Любое число может быть записано в произвольной системе счисления. Для человечества наиболее привычна десятичная система счисления, основанием которой является число 10 (поскольку используются десять цифр - от 0 до 9). Считается, что своим возникновением эта система обязана количеству пальцев на руках человека. Десятичная система счисления является позиционной, так как одна и та же цифра, размещаемая при записи числа на разных позициях, приобретает различный вес:
3593,138 = 3103 + 5102 + 9101 + 3100 + 110-1 + 310-2 + 810-3
аналогично могут быть построены системы счисления с любым другим основанием, но наибольшее распространение после десятичной, и прежде всего в цифровой измерительной технике, нашла двоичная система счисления (основание – 2, используется только две цифры – 0 и 1), также являющаяся позиционной:
10010,01 = 124 + 023 + 022 +121 +020 + 02-1 + 12-2 .
Ее применение обусловлено несравненно большей легкостью аппаратурного различения двух состояний в сравнении с десятью. Процесс счета в двоичной системе счисления аналогичен процессу счета в десятичной системе с тем лишь отличием, что перенос единицы в старший разряд реализуется при накоплении в данном разряде десятичного числа 2 (или, что то же самое, двоичного числа 10) (см. табл. 3.1).
Таблица 3.1
Эквивалентность чисел в десятичной и двоичной
системах счисления
Десятичная |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
Двоичная |
0000 |
0001 |
0010 |
0011 |
0100 |
0101 |
0110 |
0111 |
1000 |
Десятичная |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
|
Двоичная |
1001 |
1010 |
1011 |
1100 |
1101 |
1110 |
1111 |
10000 |
и т.д. |
Каждый двоичный разряд носит название двоичного числа называется старшим разрядом (максимальный вес), крайний правый – младшим разрядом (минимальный вес). В табл. 3.1 в основном представлены (за исключением самого последнего) 4-битовые числа.
Любое двоичное число путем «взвешивания» разрядов может быть элементарно «бит». Крайний левый бит преобразовано в эквивалентное десятичное число:
(101001)2 = 125 + 024 +123 + 022 + 021 +120 =(41)10 .
При подобных преобразованиях, чтобы не перепутать числа, изображенные в различных системах счисления, их обычно заключают в скобки и справа внизу указывают основание системы. Существуют специальные приемы и для обратного преобразования десятичных чисел в двоичные.
Арифметические операции с двоичными числами выполняются по тем же правилам, что и с десятичными числами, но перенос в старший разряд при суммировании производится при получении в данном разряде не (10)10 , а (2)10 или, что эквивалентно, (10)2:
+ 101101 _ 101101 х 1010 _ 110010 |1010
11110 11110 101 1010 |101
1001011 1111 + 1010 _ 1010
0000 1010
1010 0
110010
Своеобразным гибридом двоичных и десятичных чисел являются двоично-десятичные числа, которые формируются на основании более привычной для человека десятичной системы счисления, но каждая десятичная цифра записывается в виде ее двоичного эквивалента из табл. 3.1:
(9024)10 = (1001 0000 0010 0100)2/10 .
Двоично-десятичный код, как правило, используется при вводе-выводе измерительной информации из цифровых измерительных приборов.
3.2. Основные логические схемы.
Содержимое каждого бита двоичного числа (0 или 1) может рассматриваться как некоторая переменная величина. Операции с такими переменными величинами производятся с помощью ряда основных логических схем: инвертор, схема И, схема ИЛИ, схема И-НЕ, схема ИЛИ-НЕ.
Инвертор
(схема НЕ)
– это схема с одним входом и одним
выходом, формирующая выходной сигнал
в виде инверсии (отрицания) входного
сигнала. Если двоичная переменная на
входе А = 0, то двоичная переменная на
выходе В=1=![]() (
называется инверсией переменной А).
Если А=1, то В=0=
.
Таблица истинности, показывающая связь
между входными и выходными величинами
инвертора, и его условное графическое
обозначение на схемах приведены на
рис. 3.1,а.
(
называется инверсией переменной А).
Если А=1, то В=0=
.
Таблица истинности, показывающая связь
между входными и выходными величинами
инвертора, и его условное графическое
обозначение на схемах приведены на
рис. 3.1,а.
Схема И может иметь два или более входов и один выход. Логика ее работы такова, что выходная переменная С = 1 в том и только в том случае, когда все без исключения входные переменные также приняли единичные значения. Если хотя бы одна из входных переменных равна нулю. То и С = 0. Операцию И называют логическим умножением и обозначают С = АВ (легко убедиться в том, что и таблица истинности для данной логической операции подчиняется правилам чисто арифметического умножения). Если элемент И имеет два входа, его называют 2И, три – 3И и т.д. Условное графическое обозначение и таблица истинности схемы 2И показаны на рис. 3.1,б.
Схема ИЛИ также может иметь два или более входов и один выход. Логика ее работы такова, что входная переменная С = 1 в тех случаях, когда хотя бы одна из входных переменных принимает единичное значение. С = 0 лишь в том случае, когда все входные переменные равны нулю. Операцию ИЛИ называют логическим сложением и обозначают С = А + В (легко убедиться в том, что и почти вся таблица истинности для данной логической операции за исключением последней строки подчиняется правилам чисто арифметического сложения). По аналогии с элементом И двухвходовой элемент ИЛИ называют 2ИЛИ, трехвходовой – 3ИЛИ и т.д. Условное графическое обозначение и таблица истинности схемы 2ИЛИ изображены на рис. 3.1,в.
Р ассмотренные
схемы – инвертор (НЕ), И, ИЛИ – положены
в основу всей цифровой схемотехники.
На их базе может быть реализован
практически любой функциональный узел
более высокой степени сложности и
прежде всего схемы
И-НЕ
и ИЛИ-НЕ,
являющиеся комбинациями соответственно
схем И и ИЛИ и инвертора. Выходные части
(третьи столбцы) их таблиц истинности
получены инвертированием (заменой 0 на
1 и 1 на 0) в выходных частях таблиц
истинности схем И и ИЛИ. Оконечное
выполнение операции инвертирования в
элементах НЕ, И-НЕ и ИЛИ-НЕ на схеме
обозначается изображением маленькой
окружности в месте сочленения
прямоугольного контура элемента и его
выходной шины, а при
ассмотренные
схемы – инвертор (НЕ), И, ИЛИ – положены
в основу всей цифровой схемотехники.
На их базе может быть реализован
практически любой функциональный узел
более высокой степени сложности и
прежде всего схемы
И-НЕ
и ИЛИ-НЕ,
являющиеся комбинациями соответственно
схем И и ИЛИ и инвертора. Выходные части
(третьи столбцы) их таблиц истинности
получены инвертированием (заменой 0 на
1 и 1 на 0) в выходных частях таблиц
истинности схем И и ИЛИ. Оконечное
выполнение операции инвертирования в
элементах НЕ, И-НЕ и ИЛИ-НЕ на схеме
обозначается изображением маленькой
окружности в месте сочленения
прямоугольного контура элемента и его
выходной шины, а при
Р ис.3.1.
Условные графические обозначения и
таблицы истинности инвертора (а), схем
И (б), ИЛИ (в), И-НЕ (г), ИЛИ-НЕ (д)
ис.3.1.
Условные графические обозначения и
таблицы истинности инвертора (а), схем
И (б), ИЛИ (в), И-НЕ (г), ИЛИ-НЕ (д)
буквенной записи – проведением горизонтальной линии поверх комбинации символов входных переменных: С = А В, С = А + В. Условные графические обозначения и таблицы истинности схем 2И-НЕ и 2ИЛИ-НЕ приведены на рис. 3.1,г и рис. 3.1,д.
Если внимательно сопоставить таблицы истинности, показанные на рис. 3.1,б и рис. 3.1,д, то нетрудно убедиться в справедливости логического соотношения
 А
+ В = А
В .
А
+ В = А
В .
Аналогично путем сравнения таблиц истинности на рис. 3.1,в и рис. 3.1,г доказывается тождественность равенства
 А
В = А + В .
А
В = А + В .
Оба последних соотношения весьма часто используются практически в цифровой технике и являются следствиями (частными случаями) фундаментальной теоремы булевой алгебры (науки, изучающей логические операции с двоичными переменными), которая носит название «теорема де Моргана».
Следует отметить, что схемы И-НЕ и ИЛИ-НЕ универсальны, поскольку на основе каждой из них может быть реализована любая из пяти рассмотренных логических операций. Покажем это на примере схемы 2И-НЕ (рис. 3.2). В том, что приведенные схемы выполняют указанные логические операции, можно убедиться самостоятельно, составив соответствующие таблицы истинности. При построении схем, изображенных на рис. 3.2,в и рис. 3.2,г использовано первое из приведенных выше следствий теоремы де Моргана, и учтена другая очевидная теорема булевой алгебры:
![]()
(двойное отрицание логической переменной равно самой этой переменной).
3.3. Функциональные узлы цифровых измерительных приборов
Кроме реализации собственно логических операций схема 2И-НЕ может применяться для построения разнообразных функциональных узлов цифровых измерительных приборов. На рис.3.3,а и рис.3.3,б представлены два варианта логических ключей, предназначенных для управления пропуском (или непропуском) последовательностей импульсов. Любой прямоугольный импульс может быть представлен чередованием значений логической переменной 0-1-0 (прямой импульс) или 1-0-1 (инверсный импульс). Повторение этих сочетаний во времени соответствуют последовательности импульсов.
Р ис.3.2.
Реализация основных логических операций
на базе схемы 2И-НЕ: инвертор (а), схемы
И (б), ИЛИ (в), ИЛИ-НЕ (г)
ис.3.2.
Реализация основных логических операций
на базе схемы 2И-НЕ: инвертор (а), схемы
И (б), ИЛИ (в), ИЛИ-НЕ (г)
Р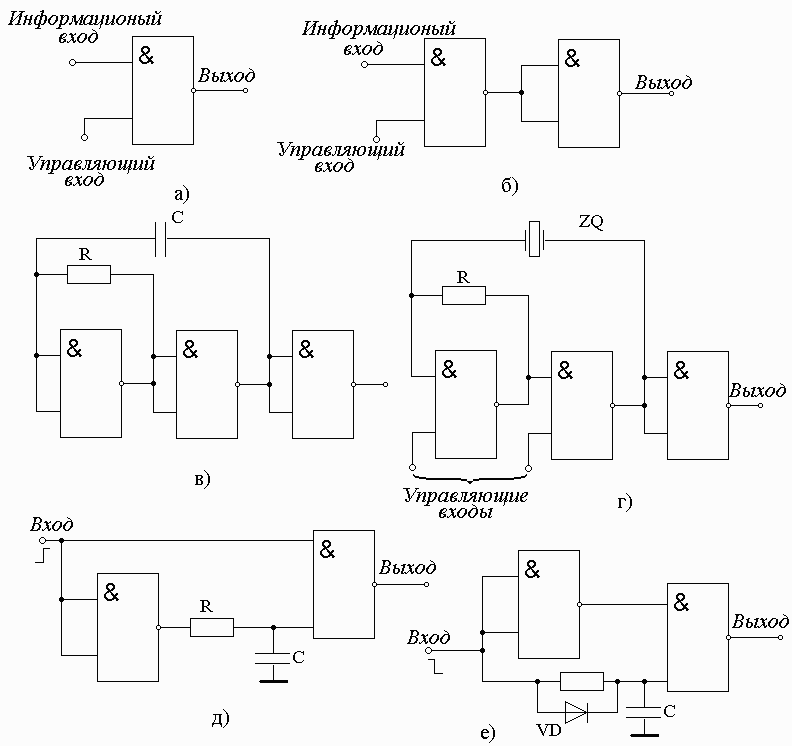 ис.3.3. Построение
функциональных узлов на базе схемы
2И-НЕ: инвертирующий (а) и неинвертирующий
(б) логические ключи, неуправляемый (в)
и управляемый (г) генераторы тактовых
импульсов, формирователи одиночных
импульсов по фронту (д) и срезу (е)
входного сигнала
ис.3.3. Построение
функциональных узлов на базе схемы
2И-НЕ: инвертирующий (а) и неинвертирующий
(б) логические ключи, неуправляемый (в)
и управляемый (г) генераторы тактовых
импульсов, формирователи одиночных
импульсов по фронту (д) и срезу (е)
входного сигнала
Если эти импульсы подавать на информационный вход схемы 2И-НЕ, в качестве которого может быть использован любой из двух ее входов, а другой вход использовать в качестве управляющего, то входные импульсы пройдут на выход логического ключа (ключ замкнут) лишь при наличии на управляющем входе разрешающего сигнала в виде логической единицы. Если на управляющем входе присутствует логический ноль, то ключ разомкнут, и входные импульсы через него не проходят (на выходе – постоянный потенциал). Различие двух приведенных схем ключей состоит лишь в том, что первый из них, когда замкнут, одновременно с пропуском входных импульсов инвертирует их, а второй за счет введения дополнительного инвертора не меняет форму пропускаемых импульсов.
Важным
узлом – «сердцем» цифровых измерительных
приборов – является генератор
тактовых импульсов,
две модификации схем которого изображены
на рис.3.3,в и рис.3.3,г. Принцип действия
генератора – простейшего автоколебательного
мультивибратора – заключается в
периодическом чередовании процессов
заряда – разряда конденсатора C,
входящего в состав времязадающей RC
– цепочки.
Пусть в данный момент времени на входе
инвертора 1 (рис.3.3,в) присутствует
логический ноль, тогда на его выходе и
соответственно на входе инвертора 2 –
логическая единица, а на выходе инвертора
2 – тоже логический ноль. Конденсатор
C
через резистор R
постепенно заряжается таким образом,
что потенциал на его левой обкладке
приближается к потенциалу логической
единицы. Это, естественно, приводит к
тому, что за счет поступления данной
единицы на вход инвертора 1 последний
переключается в противоположное
состояние, и чередование логических
сигналов на входах и выходах инверторов
1 и 2 выглядит уже так: 1-0-1. Такая комбинация
способствует перезаряду конденсатора
C и
возвращению схемы в исходное состояние,
которое, напомним, также является
неустойчивым. Таким образом, на выходе
инвертора 2 наблюдается циклическое
чередование нолей и единиц, то есть
осуществляется генерация прямоугольных
импульсов. Частота генерации определяется
постоянной времени цепочки RC
и н аходится
в соответствии с выражением
аходится
в соответствии с выражением
Необходимость присутствия в схеме инвертора 3 обусловлена тем, что на практике подобные схемы генерируют последовательности не совсем прямоугольных импульсов (на фронтах и срезах последних практически всегда наблюдаются «хвосты» ярко выраженных колебательных процессов, обусловленных неидеальностью реальных логических элементов), а это в свою очередь может привести к сбоям и ложным срабатываниям в работе цифровых узлов, на которые поступают данные импульсы. Инвертор 3, не участвуя в процессе собственно генерации, осуществляет дополнительное формирование вырабатываемых импульсов, приближая их форму к максимально прямоугольной. Кроме того, его присутствие позволяет устранить зависимость частоты генерации от величины нагрузки (он играет роль буфера).
Под влиянием внешних дестабилизирующих факторов (изменение температуры, влажности и т.д.) параметры R, C, а так же логических элементов неизбежно «уходят», что ведет к нестабильности во времени частоты следования генерируемых импульсов. Для устройств и приборов, не связанных с измерением временных и частотных характеристик, для которых важно, например, лишь количество поступивших с генератора тактовых импульсов, данный фактор не играет никакой роли. Во всех же остальных случаях, когда частоту колебаний требуется стабилизировать на фиксированном уровне, вместо конденсатора C в схему генератора включают кварцевый резонатор ZQ (рис.3.3,г), ориентированный на одну конкретную стандартную частоту, например, 50 кГц, 100 кГц, 1МГц и т.д. Номинал резистора при этом можно взять равным R = 200 Ом. Кварцевая стабилизация позволяет существенно снизить нестабильность частоты генерации вплоть до уровня 10-5 (в относительных единицах). Еще более высокая стабильность (порядка 10-9) может быть достигнута за счет применения специальных конструктивных мер и прежде всего термостатирования генератора и кварцевого резонатора (когда их помещают в замкнутый механический кожух, в котором поддерживается постоянная температура).
В схеме генератора на рис.3.3,г кроме включения кварцевого резонатора ZQ имеется еще одна особенность: наличие управляющих входов. Такая схема будет генерировать импульсы лишь тогда, когда на обоих управляющих входах появится разрешающий сигнал логической единицы, т.е. данный генератор является управляемым (стробируемым). Если требуется только один управляющий вход, то эти входы могут быть объединены, либо один из них следует соединить с другим входом данного элемента 2И-НЕ, превратив последний тем самым в инвертор. В тех же случаях, когда управление генератором не требуется вовсе, подобную манипуляцию следует проделать с обоими элементами 2И-НЕ, что является возвратом к схеме на рис.3.3,в.
Достаточно часто при построении цифровых измерительных приборов возникает потребность в распознании фронта (перепада из 0 в 1) или среза (перепада из 1 в 0) входного прямоугольного импульса (в случае инверсного импульса его фронту, наоборот, соответствует перепад из 1 в 0, а срезу – перепад из 0 в 1). Эта служебная операция, реализуемая, как правило, путем генерации в соответствующий момент времени одиночного короткого импульса, необходима в основном для нормирования входных импульсов данного функционального узла по длительности, а также для создания микропрограмных автоматов, осуществляющих синхронизацию работы всех блоков цифрового измерительного прибора и управление их функционированием в нужной временной последовательности.
На рис.3.3,д и рис.3.3,е приведены две схемы таких формирователей, являющихся, по существу, одновибраторами и откликающихся на один соответствующий перепад на входе генерацией одного стандартного выходного импульса. Пусть на входе формирователя (рис.3.3,д) действует сигнал логического ноля, присутствие которого на одном из входов схемы 2И-НЕ обеспечивает наличие на ее выходе, являющемся выходом всего формирователя, логической единицы. В то же время конденсатор C постепенно заряжается через резистор R от напряжения логической единицы, формируемого инвертором. Поскольку напряжение, снимаемое с обкладок конденсатора, подается на второй вход схемы 2И-НЕ, то через некоторое время оказывается, что на этом входе действует логическая единица, что впрочем никак не сказывается на выходном сигнале формирователя в целом.
При перепаде входного сигнала из 0 в 1 получается, что на обоих входах схемы 2И-НЕ в течение определенного промежутка времени присутствуют сигналы логической единицы, а это, естественно, приводит к ее переключению в состояние логического ноля на выходе. Данное состояние является неустойчивым, поскольку при логической единице на входе формирователя на выходе инвертора присутствует логический ноль, и, следовательно, конденсатор C постепенно разряжается через резистор R и выходное сопротивление инвертора.
С течением времени напряжение на обкладках конденсатора приблизится к уровню логического ноля, на что схема 2И-НЕ откликнется восстановлением на выходе формирователя логической единицы. Несложно увидеть, что на перепад из 1 в 0 данный формирователь никак не откликнется.
Генерируемый формирователем импульс является инверсным (1-0-1). Если это нежелательно, то спасти положение можно, подключив к выходу формирователя дополнительный инвертор. Длительность формируемого импульса определяется параметрами RC – цепочки (ее постоянной времени) и находится из выражения
U 0,7 RC . Типовые номиналы: R = 200 Ом, C = 6800 пФ. При этом U1мкс.
Функционирование формирователя (рис.3.3,е) полностью идентичного выше описанному с тем лишь отличием, что он откликается генерацией одиночного инверсного импульса фиксированной длительности, рассчитываемой по той же формуле, на входной перепад из 1 в 0, а на обратный не реагирует. Кроме того, параллельно резистору R здесь включен полупроводниковый диод VD. Его назначение – форсирование процесса заряда конденсатора C, что необходимо при сравнительно быстрых переключениях входного сигнала формирователя. Таким образом, заряд конденсатора C осуществляется через малое сопротивление открытого диода VD, а разряд – через резистор R. Точно так же диод может быть использован и в первом формирователе (рис.3.3,д).
Простейшими цифровыми схемами с памятью являются триггеры, под которыми понимаются устройства с двумя устойчивыми состояниями равновесия, предназначенные для записи и хранения двоичной информации (в одном триггере – один бит). Под действием входных управляющих сигналов триггер переключается из одного устойчивого состояния в другое и сохраняет его в случае дальнейшего отсутствия входных воздействий теоретически бесконечно долго (на практике эта идеализация работы триггера в режиме хранения может быть нарушена появлением статических или импульсных помех в сигнальных цепях или в цепях питания интегральных микросхем).
Существуют
самые различные модификации триггеров.
Все они могут быть построены на основе
базовых логических элементов, но
выпускаются и в виде специализированных
микросхем. Простейшим является RS
– триггер,
изображенный на рис.3.4,а. Он образован
двумя элементами 2И-НЕ, взаимно охваченными
перекрестными обратными связями, и
имеет устанавливающий
![]() (от англ.
set
–
установка)
и сбрасывающий
(от англ.
set
–
установка)
и сбрасывающий
![]() (от
англ. reset
– сброс) управляющие входы, а также
прямой Q
и инверсный
(от
англ. reset
– сброс) управляющие входы, а также
прямой Q
и инверсный
![]() информационные
выходы. Поскольку в таком исполнении
RS
– триггер управляется инверсными
импульсами (1-0-1), то в исходном состоянии
на входах
и
должны
присутствовать логические единицы.
Предположим,
что на выходе Q
триггера логический ноль, тогда на
входах элемента 2 соответственно ноль
и единицу, а на его выходе в соответствии
с логикой работы схемы 2И-НЕ – единицу.
Эта единица совместно с единицей,
присутствующей на входе
,
обеспечивает присутствие на выходе
элемента 1 логического ноля, что и было
нами предположено. Следовательно,
данное состояние является устойчивым
(аналогично можно доказать устойчивость
противоположного состояния).
информационные
выходы. Поскольку в таком исполнении
RS
– триггер управляется инверсными
импульсами (1-0-1), то в исходном состоянии
на входах
и
должны
присутствовать логические единицы.
Предположим,
что на выходе Q
триггера логический ноль, тогда на
входах элемента 2 соответственно ноль
и единицу, а на его выходе в соответствии
с логикой работы схемы 2И-НЕ – единицу.
Эта единица совместно с единицей,
присутствующей на входе
,
обеспечивает присутствие на выходе
элемента 1 логического ноля, что и было
нами предположено. Следовательно,
данное состояние является устойчивым
(аналогично можно доказать устойчивость
противоположного состояния).
При подаче на вход инверсного импульса на выходе элемента 1 и соответственно на выходе Q триггера появляется логическая единица, которая в совокупности с единицей, присутствующей на входе , обеспечивает появление на выходе элемента 2 логического ноля. Следовательно, триггер переключается в другое устойчивое состояние.
Р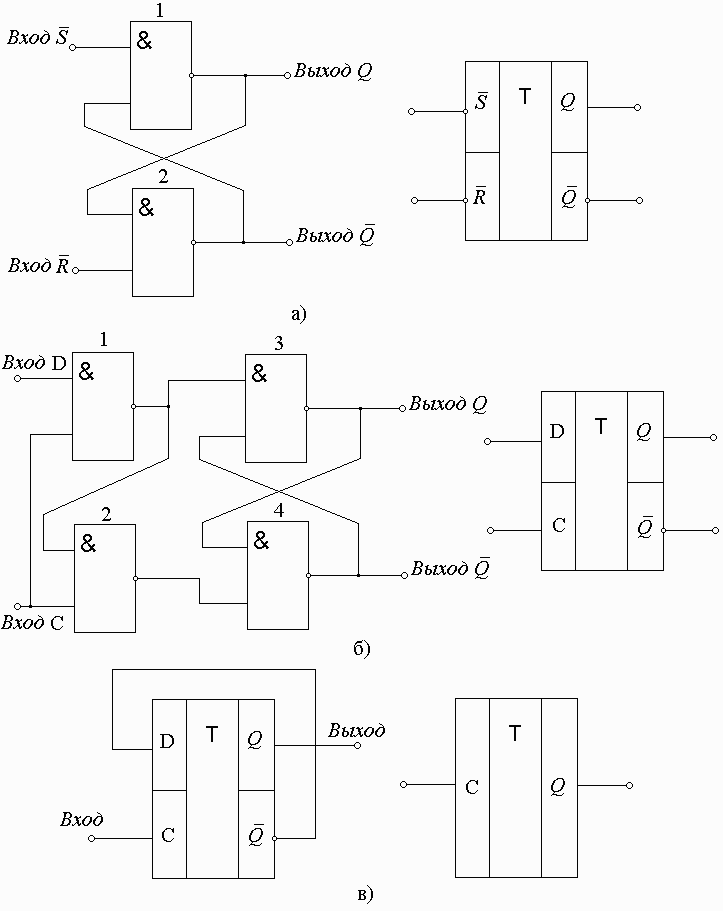 ис.3.4. Принципиальные
схемы и условные графические обозначения
RS-триггера
(а), D-триггера
(б) и Т-триггера (в)
ис.3.4. Принципиальные
схемы и условные графические обозначения
RS-триггера
(а), D-триггера
(б) и Т-триггера (в)
Если теперь подать инверсный импульс на вход , то триггер вновь возвратится в исходное состояние. Несложно убедиться, что в любой момент времени на выходах Q и присутствуют противоположные логические сигналы (соответственно, 0 и 1 или, наоборот, 1 и 0) и что последовательные переключения триггера из одного устойчивого состояния в другое и обратно возможны лишь при чередующемся поступлении управляющих импульсов на входы и . Иными словами, если на один из входов RS – триггера подать подряд несколько импульсов, то лишь первый перебросит его в противоположное состояние, а остальные будут игнорированы.
Другой разновидностью схем с памятью и развитием RS – триггера является D – триггер (рис.3.4,б). Он имеет информационный вход данных D (от англ. data – данные) и управляющий синхровход C (вход разрешения записи данных), а также выходы Q и . Если на входе C присутствует запрещающий запись сигнал логического ноля, то какая бы двоичная информация (0 или 1) ни подавалась на вход D, на выходах элементов 1 и 2 в соответствии с их таблицами истинности неизменно будут поддерживаться сигналы логической единицы, и, следовательно, RS – триггер, построенный на элементах 3 и 4, останется в исходном состоянии.
Если же на вход C подать разрешающий запись кратковременный прямой импульс, то в оконечный RS – триггер на элементах 3 и 4 независимо от его исходного состояния запишется состояние логического сигнала (0 или 1), присутствовавшего на входе D в момент среза разрешающего импульса. Это состояние в дальнейшем можно «прочесть» на выходе Q триггера, а его инверсию – на выходе . Таким образом, D – триггер может запоминать один бит двоичной информации.
Как именно происходит процесс записи, несложно проследить по его принципиальной схеме: если по входу C разрешается запись (кратковременным сигналом логической единицы), то оба инвертирующих логических ключа 1 и 2 замкнуты, и логическая единица на входе D превращается за счет инвертирования элементом 1 в логический ноль, который, поступая на вход оконечного RS – триггера, устанавливает на его выходе Q логическую единицу, что и присутствовала на входе D. Аналогично логический ноль на входе D, превратившись в логическую единицу на выходе элемента 1, никак не воздействуют на RS – триггер по входу , но, претерпев еще одно инвертирование элементом 2 и вновь став логическим нолем, поступает на вход RS – триггера и способствует появлению на его выходе Q логического ноля, т.е. записи последнего.
И, наконец, третьей распространенной модификацией триггеров является T – триггер или, как его еще часто называют, триггер со счетным входом (рис.3.4,в). Он элементарно строится на основе D – триггера и имеет один вход и один выход. Логика его работы такова, что с каждым новым поступившим на вход импульсом двоичное состояние на выходе меняется на противоположное. Почему так происходит, несложно уяснить, если вспомнить принципы функционирования D – триггера. Пусть в исходном состоянии на выходе Q присутствует логический ноль, тогда на выходе и соответственно на входе D – логическая единица. Поступающий на вход (фактически это вход C D – триггера) импульс записывает эту единицу, и отныне она поддерживается на выходе Q (соответственно на выходе и на входе D – теперь логический ноль). Следующий входной импульс записывает в триггер упоминавшийся последним логический ноль и т.д. Следовательно, такой триггер может считать поступившие на его вход импульсы.
RS – триггер обычно используют в каналах микропрограммного управления цифровыми измерительными приборами: для реализации циклов запуска и сброса, для формирования промежутков времени определенной длительности, для устранения дребезга контактов механических переключателей. Дребезг контактов, под которым понимаются кратковременные затухающие механические колебания упругого элемента переключателя, практически не сказывается к примеру, при включении и отключении питающей силовой цепи, но великолепно чувствуется маломощными и быстродействующими интегральными микросхемами. В результате задаваемый механическим переключателем, скажем, единичный перепад из ноля в единицу из-за дребезга контактов воспринимается как пачка (короткая последовательность) прямоугольных импульсов, что, естественно, приводит к неверному функционированию цифрового устройства.
Радикальным средством борьбы с этим нежелательным явлением служит типовая схема на базе RS – триггера (рис.3.5,а). Ее работа не требует подробных комментариев. Отметим лишь, что средняя точка переключателя связана с земляной шиной (поскольку такой RS – триггер управляется инверсными импульсами) и что управляющие входы схемы через резисторы R связаны с положительным полюсом источника питания микросхем E (поскольку в исходном состоянии на обоих входах должны присутствовать логические единицы). Обычно R=1 кОм. Перемещение подвижного элемента переключателя из одного крайнего положения в другое в этой схеме, несмотря на дребезг контактов, приводит к однократному перепаду на каждом из выходов триггера, что и требуется. При этом используется упоминавшееся выше свойство RS – триггера реагировать только на первый из поступившей на один и тот же его вход пачки импульсов.
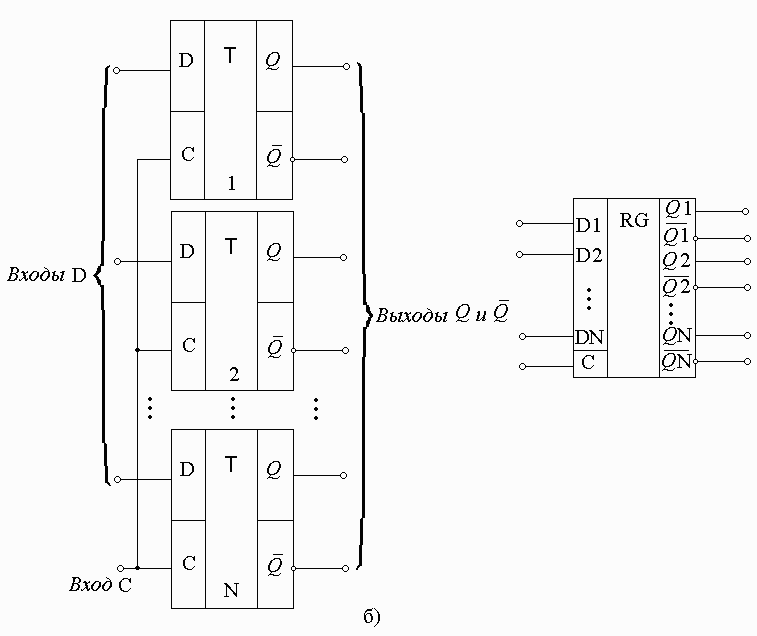
Поскольку D – триггер способен запомнить только один бит информации, а двоичные числа, как правило, имеют гораздо большее число разрядов, то для их запоминания используют одновременно несколько D – триггеров, управляющие синхровходы которых объединены (рис.3.5,б). Получаемый таким образом функциональный узел цифровой измерительной техники называется параллельным регистром памяти и используется в качестве оперативного запоминающего устройства. Количество D – триггеров должно равняться максимально возможной разрядности запоминаемого двоичного слова (числа). Обычно на вход D1 подают младший разряд кода, который следует запомнить, а на вход DN – старший разряд (N – число разрядов кода). После прохождения синхроимпульса, разрешающего запись, код запоминается и может быть считан с выходов Q. Аналогично с выходов может быть считана инверсия хранимого кода. Регистры памяти выпускаются в виде специализированных микросхем, каждая из которых содержит не менее четырех D – триггеров. В отдельных случаях выходы в таких микросхемах могут отсутствовать.
На основе T – триггера строятся счетчики импульсов (рис.3.5,в). Если соединить несколько таких триггеров последовательно (выход Q предыдущего связать со входом C следующего), подавать на самый первый вход C единичные импульсы и анализировать код, снимаемый каждый раз с выходов 20 (младший разряд) – 2N (старший разряд), то окажется, что его отсчеты последовательно повторяют значения табл.3.1, т.е. полученная структура в двоичном коде подсчитывает количество поступивших входных импульсов. Легко увидеть, что максимальное число, до которого может досчитать счетчик, равно 2N+1-1, где N+1 – число триггеров, входящих в его состав. Первый же пришедший сверх этого числа импульс приводит к самообнулению счетчика (на всех его выходах устанавливаются сигналы логического ноля), и вся процедура счета повторяется сначала.
Р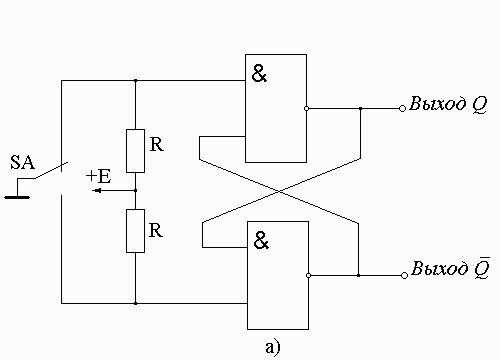
 ис.3.5. Применение
триггеров: устройство для устранения
дребезга контактов (а), схемы и условные
графические обозначения регистра
памяти (б) и счетчика импульсов (в)
ис.3.5. Применение
триггеров: устройство для устранения
дребезга контактов (а), схемы и условные
графические обозначения регистра
памяти (б) и счетчика импульсов (в)
Уяснить принцип функционирования счетчика станет проще, если вспомнить, что триггер со счетным входом на каждую пару входных импульсов откликается одним выходным, длительность которого равна периоду следования входных импульсов. Таким образом, если самый первый T – триггер считает «единицы» входных импульсов, то второй считает уже «пары» (ведь на его период поступают удлиненные импульсы с выхода триггера), третий – «четверки» и т.д. Кроме счетного входа и выходов любой счетчик импульсов обязательно должен иметь сбрасывающий вход R, аналогичный одноименному входу RS – триггера (хотя на рис.3.4,в такой вход отсутствует). При подаче на вход R управляющего импульса текущее содержимое счетчика обнуляется, и он подготавливается к следующему циклу счета.
Промышленностью выпускаются счетчики импульсов в виде специализированных микросхем, причем кроме уже рассмотренного, называемого двоичным счетчиком, широко применяются и счетчики двоично-десятичные. Последние за счет организации внутренних обратных связей считают в двоично-десятичном коде, т.е. такой счетчик сомообнуляется с поступлением на его вход каждого десятого импульса. Существуют также так называемые реверсивные счетчики импульсов (как двоичные, так и двоично-десятичные). Их особенностью является наличие двух счетных входов – суммирующего и вычитающего. При поступлении импульсов на первый из них код на выходе такого счетчика монотонно возрастает, а на второй – монотонно уменьшается.
Достаточно часто при построении цифровых измерительных приборов возникает потребность в таком функциональном узле как делитель частоты, понижающий частоту входной импульсной последовательности в фиксированное целое число раз. Эта задача элементарно решается соответствующим счетчиком импульсов (если надо поделить частоту, к примеру, в десять раз, то берется и счетчик на десять), счетный вход которого является входом делителя частоты, а выход старшего разряда – выходным последнего.
Рассмотренными функциональными узлами номенклатура их далеко не исчерпывает. Широко применяются также такие узлы как сумматор, селектор, схема сравнения, преобразователь кодов и др. Однако и на базе описанных выше функциональных узлов могут быть построены разнообразные цифровые измерительные приборы, в том числе многие из тех, что представлены в гл.2: например, электронно-счетный частотомер, периодометр, измеритель временных интервалов и т.д. Практические рекомендации по их построению изложены в руководстве к лабораторной работе «Принципы построения цифровых измерительных приборов на интегральных микросхемах», приведенном в приложении 1.
4. ЭЛЕКТРИЧЕСКИЕ ИЗМЕРЕНИЯ НЕЭЛЕКРИЧЕСКИХ ВЕЛИЧИН
4.1 Электрические приборы для измерения неэлектрических величин
В целом ряде практических приложений (при контроле технологических процессов, в научных исследованиях и т.д.) возникает необходимость в измерении не только электрических, но и различных неэлектрических величин (температура, давление, влажность, перемещение, скорость и др.). В большинстве случаев наиболее целесообразно измерять неэлектрические величины электрическими приборами, поскольку последние традиционно имеют высокие метрологические характеристики.
Электрические приборы для измерения неэлектрических величин (рис.4.1) обязательно содержат измерительный преобразователь ИП
н
Рис.4.1. Электрический
прибор для измерения неэлектрических
величин
Для упрощения построения электрических приборов для измерения неэлектрических величин применяют унификацию выходных сигналов ИП с помощью унифицирующих преобразователей, которые обеспечивают один и тот же уровень выходного сигнала y для различных диапазонов изменения разнообразных измеряемых величин x. Наиболее распространены унифицированные сигналы в виде постоянного тока и напряжения (0 – 5) мА, (0 – 20) мА, (0 – 1) В, (0 – 10) В, а также частоты (4 – 8) кГц.
4.2. Резистивные преобразователи механических величин
Реостатными называются преобразователи, выполненные в виде реостата, движок которого перемещается под действием входной преобразуемой величины. Выходной величиной таких ИП является электрическое сопротивление, функционально связанное с положением движка. Реостатные преобразователи бывают проволочными и непроволочными. Проволочные отличаются высокой точностью и стабильностью функции преобразования и вместе с тем низкой разрешающей способностью (ступенчатая функция преобразования при переходе от витка к витку) и невысоким сопротивлением (до десятков кОм). Непроволочные преобразователи, наоборот, характеризуются большими значениями сопротивления и разрешающей способности, но в то же время недостаточными точностью и стабильностью функции преобразования.
Р
 еостатные
преобразователи в зависимости от
конструктивного исполнения делятся
на преобразователи с вращательным
и линейным
перемещениями подвижного элемента
(рис.4.2). Наиболее часто преобразователи
изготавливают с линейной
зависимостью
между изменением выходного сопротивления
и входным перемещением. В этом случае
функции преобразования преобразователей,
изображенных на рис.4. 2,
соответственно имеют вид:
еостатные
преобразователи в зависимости от
конструктивного исполнения делятся
на преобразователи с вращательным
и линейным
перемещениями подвижного элемента
(рис.4.2). Наиболее часто преобразователи
изготавливают с линейной
зависимостью
между изменением выходного сопротивления
и входным перемещением. В этом случае
функции преобразования преобразователей,
изображенных на рис.4. 2,
соответственно имеют вид:
где Rp – полное сопротивление реостатного преобразователя (между крайними выводами), l – его длина, x и x – входные угловое (в радианах) и линейное перемещения.

Рис. 4.2. Реостатные преобразователи с вращательным (а) и линейным (б) перемещением подвижного элемента
В ряде случаев применяются реостатные преобразователи с нелинейным распределением сопротивления вдоль каркаса. Заданная функция преобразования Rx = F(x) обеспечивается либо изменением профиля каркаса, как это, к примеру, показано на рис.4.2,б, либо применением намотки с переменным шагом, либо шунтированием участков линейного реостата дополнительными резисторами (данный прием использован, в частности, при построении синусно-косинусного потенциометра).
П огрешность
квантования
проволочных преобразователей, являющаяся
следствием их ступенчатой функции
преобразования, определяется очевидным
выражением
огрешность
квантования
проволочных преобразователей, являющаяся
следствием их ступенчатой функции
преобразования, определяется очевидным
выражением
где Rв – сопротивление витка, W – число витков преобразователя. Поскольку на практике величина W достигает сотен и тысяч, то значение кв может быть сведено к минимуму. Результирующая погрешность реостатных преобразователей находится в диапазоне (0,05 – 0,1)%.
Т
Рис.4.3. Проводниковый
тензорезистор

Типовые параметры проводниковых тензорезисторов: длина чувствительного элемента – (20 – 500) Ом, коэффициент относительной тензочувствительности – (0,5 – 4).
Полупроводниковые тензорезисторы конструктивно бывают как с подложками, так и без них. Они имеют заведомо более высокую чувствительность (К=100…200). В то же время погрешности полупроводниковых тензорезисторов – (0,5 – 1)%, тогда как проводниковых – (0,1 – 0,2)%. Тензорезисторы применяются для измерения сил, давлений, перемещений.
4.3. Электростатические преобразователи механических величин
Е
 мкостным
называется преобразователь в виде
конденсатора, емкость которого зависит
от измеряемой неэлектрической величины.
Наибольшее распространение получили
преобразователи с плоскостными
и цилиндрическими
электродами (рис.4.4). Их функции
преобразования соответственно имеют
вид:
мкостным
называется преобразователь в виде
конденсатора, емкость которого зависит
от измеряемой неэлектрической величины.
Наибольшее распространение получили
преобразователи с плоскостными
и цилиндрическими
электродами (рис.4.4). Их функции
преобразования соответственно имеют
вид:
Где 0 – электрическая постоянная, r – относительная диэлектрическая проницаемость среды между электродами, S – эффективная площадь взаимодействия обкладок, d – расстояние между ними, h – длина цилиндрической поверхности, R1 – внутренний радиус внешнего цилиндра, R2 – внешний радиус внутреннего цилиндра.
Р ис.4.4. Емкостные
преобразователи с плоскостными (а) и
цилиндрическими (б) электродами
ис.4.4. Емкостные
преобразователи с плоскостными (а) и
цилиндрическими (б) электродами
Емкостные
преобразователи используются для
измерения свойств материалов (измерение
величины r),
а также для измерения перемещений.
Поскольку в преобразователях с
плоскостными электродами Cx
линейно зависит от r
и S, но
нелинейно от d,
то их диапазон преобразования обычно
не превышает нескольких процентов
начального значения d
(чтобы работать на квазилинейном участке
функции преобразования). Расширить
диапазон преобразования можно путем
использования дифференциального
преобразователя
(рис.4.5), в котором верхний и нижний
электроды неподвижны, а средний может
перемещаться, реагируя на соответствующее
изменение измеряемой неэлектрической
величины. Очевидно, что приращения
выходных емкостей С1
и С2
такого преобразователя имеют
противоположные знаки. Это эффективно
используется путем включения С1
и С2
в смежные плечи моста переменного тока,
в результате чего существенно возрастает
чувствительность измерительной схемы
и уменьшается н
Рис.4.5. Дифференциальный
емкостной преобразователь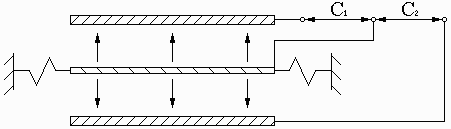 елинейность
функции преобразования. Начальная
емкость емкостных п
елинейность
функции преобразования. Начальная
емкость емкостных п
Пьезоэлектрическим называется преобразователь, использующий прямой пьезоэлектрический эффект, который заключается в электрической поляризации некоторых диэлектриков при механическом напряжении в их кристаллах. Наиболее известный пьезоэлектрический кристалл – кварц (SiO2). Особенностью пьезоэффекта является знакочувствительность, т.е. изменение знака заряда при переходе от сжатия кристалла к растяжению. Функция преобразования подобных преобразователей:
Ux = kFx
Где Ux – выходное переменное напряжение, снимаемое с преобразователя, Fx – выходная измеряемая знакопеременная сила, k – коэффициент пропорциональности.
Пьезоэлектрические преобразователи нельзя использовать для преобразования статических входных величин, поскольку из-за конечности входного сопротивления нагрузки генерируемый заряд постепенно стекает с поверхности преобразователей. Пьезопреобразователи позволяют измерять механические величины, меняющиеся с частотой (7 – 10) кГц. Погрешности – (3 – 4)%.
4.4. Электромагнитные преобразователи механических величин
В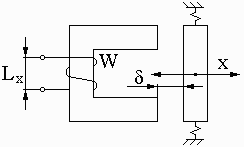 индуктивных
преобразователях используется
зависимость индуктивности катушки от
изменения сопротивления магнитной
цепи. На рис.4.6 представлен преобразователь
с переменной
длиной воздушного зазора.
индуктивных
преобразователях используется
зависимость индуктивности катушки от
изменения сопротивления магнитной
цепи. На рис.4.6 представлен преобразователь
с переменной
длиной воздушного зазора.
Е
Рис.4.6. Индуктивный
преобразователь с переменной длиной
воздушного зазора![]()
где 0 – магнитная постоянная, W – число витков катушки, S – площадь поперечного сечения магнитной цепи, - длина воздушного зазора. Таким образом, функция преобразования Lx() нелинейна и близка к гиперболической. Линейной характеристику можно считать лишь при малых относительных изменениях
П
Рис.4.7. Дифференциальный
индуктивный преобразователь
П ри
последовательном и встречном включении
обмоток их суммарная индуктивность:
ри
последовательном и встречном включении
обмоток их суммарная индуктивность:
где - приращение зазора, вызванное воздействием входной измеряемой неэлектрической величины. Поскольку отношение в выражении для функции преобразования возведено в квадрат, то линейность характеристики дифференциального преобразователя обеспечивается в более широких пределах по сравнению с соответствующим недифференциальным аналогом.
И
Рис.4.8. Индуктивный
преоб-разователь с пере-менной площадью
воздушного зазора
Рис.4.9. Магнитоупругий
преобразователь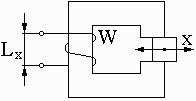

Р абота
трансформаторных
преобразователей основана на соотношении
для ЭДС, наводимой в измерительной
обмотке:
абота
трансформаторных
преобразователей основана на соотношении
для ЭДС, наводимой в измерительной
обмотке:
где
W1
и W2
– числа
витков намагничивающей и измерительной
обмоток, I1
– ток в намагничивающей обмотке W1,
ZM
– магнитное сопротивление цепи,
являющееся функцией тех же параметров,
что и в случае индуктивных преобразователей.
По конструкции трансформаторные
преобразователи напоминают индуктивные
и могут быть как с
переменным воздушным зазором,
так и с
переменной площадью воздушного зазора
(рис.4.10). Главное их отличие от индуктивных
состоит в том, что выходной величиной
является не индуктивность, а ЭДС, для
чего обмотка W1
и запитывается
током I1
от источника переменного напряжения,
а выходной сигнал снимается с
дополнительной обмотки W2.
По сравнению с индуктивными трансформаторные
преобразователи имеют такое важное
преимущество, как отсутствие
гальванической связи между питающими
и выходными цепями,
что способствует значительному повышению
их п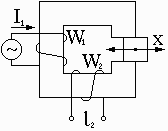 омехозащищенности.
омехозащищенности.
Рис.4.10.
Трансформаторный преобразователь с
переменной площадью воздушного зазора
4.5. Оптико-электрические преобразователи
Оптико-электрическими называют преобразователи, в которых измеряемая неэлектрическая величина и выходная электрическая связаны потоком электромагнитного излучения оптического диапазона волн – (300 – 0,003) мкм. Оптико-электрический преобразователь, как правило, содержит источник излучения, оптический канал и приемник излучения, в котором энергия излучения преобразуется в выходной электрический параметр.
Источники оптического излучения делятся на тепловые (лампы накаливания) и люминесцентные (газоразрядные лампы, оптические квантовые генераторы – лазеры и светодиоды). Во многих случаях источником излучения является сам объект измерения.
Приемники оптического излучения делятся на тепловые и фотоэлектронные. Принцип работы тепловых приемников основан на преобразовании энергии излучения в тепловую с последующим ее преобразованием в электрический параметр. К ним относятся термоэлементы, болометры и пироэлектрики. Термоэлемент – это тонкий металлический диск с зачерненной поверхностью, которой касается рабочий спай термопары (диск под воздействием лучистой энергии нагревается). В болометрах используется изменение электрического сопротивления зачерненной тонкой полоски из проводникового или полупроводникового материала под действием повышения температуры, вызванного облучением. Пироэлектрик – это кристалл, электрическая поляризация которого изменяется при повышении температуры, вызванном поглощением падающего на него излучения.
Принцип работы фотоэлектронных приемников основан на использовании фотоэффекта. Фотоэлемент с внешним фотоэффектом представляет собой электронную лампу, в которой падающий на фотокатод свет вызывает эмиссию электронов. Фотоэлементом с внешним фотоэффектом является фотоумножитель (рис.4.11), в котором поток фотоэлектронов усиливается на нескольких ступенях вторичной эмиссии. Он является наиболее чувствительным фотоприемником.
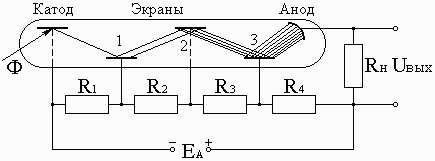
Рис. 4.11. Фотоумножитель
Фотоэлемент с внутренним фотоэффектом представляет собой полупроводниковый фоторезистор, в котором действие света вызывает непосредственное изменение его электрической проводимости, не зависящее от направления тока. Также в качестве приемников оптического излучения применяются вентильные фотоэлементы, в которых под действием светового потока между электродами возникает ЭДС, и фотодиоды, смещенные внешним источником в обратном направлении (возросший потенциальный барьер облегчает движение для неосновных носителей, возникающих под действием излучения).
Исследуемая среда вводится в оптический канал. При этом используются свойства светового потока ослабляться, рассеиваться, отражаться, отклоняться при его прохождении сквозь исследуемую среду.
4.6. Терморезистивные преобразователи
Терморезистором называется резистор с большим температурным коэффициентом сопротивления (ТКС), сопротивление которого определяется температурой окружающей среды. Проводниковые терморезисторы в основном выполняются из медной, платиновой или никелевой проволоки. Для медных терморезисторов в диапазоне от минус 200С до +200С функция преобразования линейна
R = R0(1+,
где - ТКС, температура, С, R0 – сопротивление при 0С.
Платина допускает нагрев до 1200С (без окисления и расплавления). Функция преобразования нелинейна:
от 0 до +660С R=R0(1+A+B2);
от 0 до минус 180С R=R[1+A+B2+C(100)3],
где А, В, С – числовые коэффициенты.
Никелевые терморезисторы в диапазоне от 0 до 100С имеют линейную функцию преобразования, высокое удельное сопротивление (в пять раз выше, чем у меди) и большой ТКС.
 Полупроводниковые
терморезисторы (термисторы)
имеют отрицательный ТКС, в восемь-девять
раз больший, чем у металлов, большее
номинальное сопротивление (до 10 МОм).
Температурный диапазон – от минус
100С
до +300С.
Недостатки полупроводниковых
терморезисторов – плохая воспроизводимость
характеристик от образца к образцу и
нелинейный характер функции преобразования:
Полупроводниковые
терморезисторы (термисторы)
имеют отрицательный ТКС, в восемь-девять
раз больший, чем у металлов, большее
номинальное сопротивление (до 10 МОм).
Температурный диапазон – от минус
100С
до +300С.
Недостатки полупроводниковых
терморезисторов – плохая воспроизводимость
характеристик от образца к образцу и
нелинейный характер функции преобразования:
где А, В – числовые коэффициенты, к – абсолютная температура, К.
Для измерения сопротивления терморезисторов используют мостовые схемы.