18) Использование z-преобразования
Передаточные функции разомкнутых импульсных систем
Р азомкнутая
линейная импульсная система может быть
схематически представлена в виде
последовательного соединения импульсного
элемента (ИЭ) и непрерывной части (НЧ)
).
азомкнутая
линейная импульсная система может быть
схематически представлена в виде
последовательного соединения импульсного
элемента (ИЭ) и непрерывной части (НЧ)
).
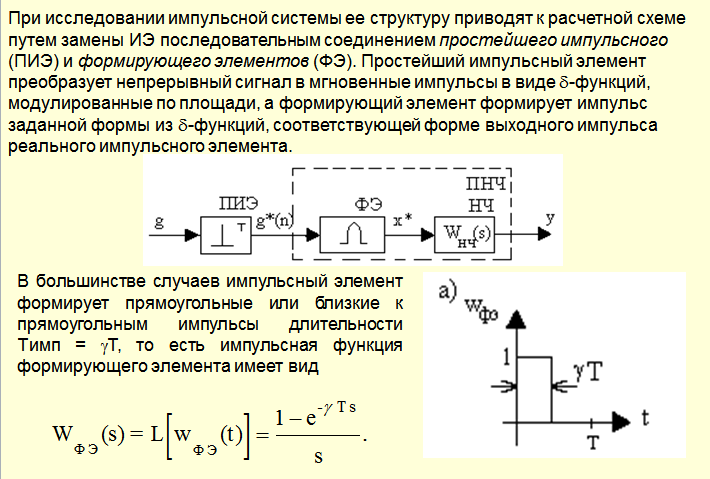
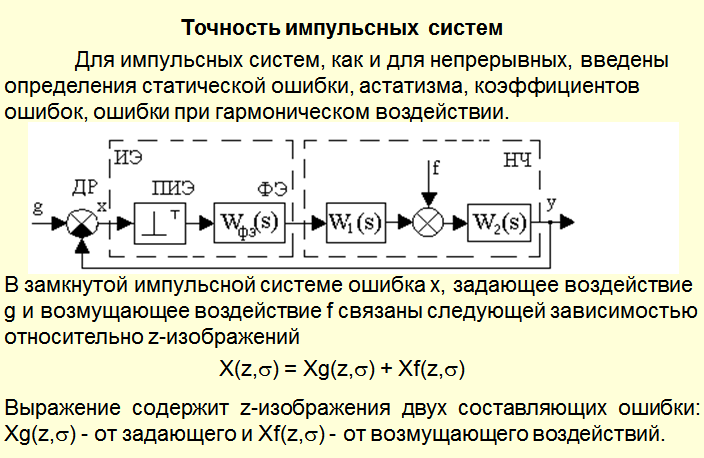
Импульсный элемент преобразует задающее воздействие g(t) в последовательность импульсов x*, амплитуда которых пропорциональна входному непрерывному сигналу. Импульсная последовательность после прохождения через непрерывную часть вследствие сглаживающих свойств последней превращается в непрерывную величину на выходе y(t).
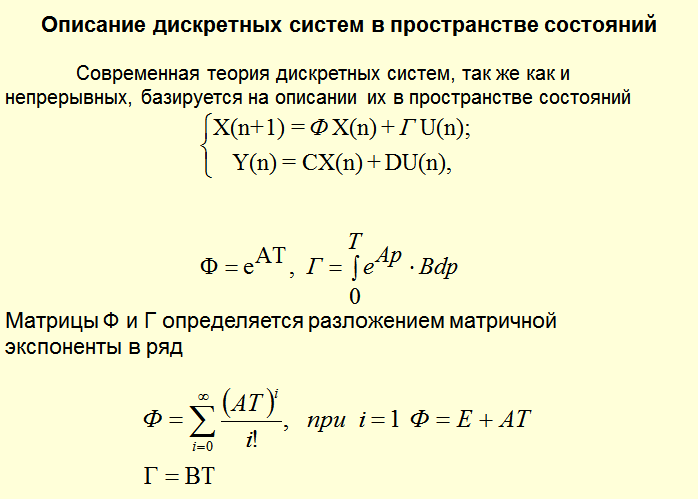
19) Импульсные системы в пространстве состояний
20)Фундаментальные свойства ис
21) Устойчивость ис
Устойчивость дискретных систем
Как и для непрерывных систем, устойчивость дискретных систем является необходимым условием их работоспособности.
Линейная дискретная система называется устойчивой, если переходная составляющая процесса регулирования yп[n,] затухает с течением времени.
Для устойчивости дискретной системы необходимо и достаточно, чтобы все корни характеристического полинома замкнутой системы (полюса передаточной функции замкнутой дискретной системы) удовлетворяли условию zi < 1; i = 1, 2, .., m.
Если хотя бы один корень zi > 1, система будет неустойчивой. Значением какого-либо корня zi = 1 при всех остальныхzi < 1 определяется граница устойчивости дискретной системы.
Г рафически
область устойчивости дискретной системы
на плоскости z корней характеристического
уравнения изображается единичным
кругом.
рафически
область устойчивости дискретной системы
на плоскости z корней характеристического
уравнения изображается единичным
кругом.
22) Цифровые системы (фильтры). Общие сведения
Цифровые корректирующие фильтры реализуются с помощью цифрового вычислителя. В этом случае входной сигнал фильтра x преобразуется в АЦП, и далее решение разностного уравнения на цифровом вычислителе u выводится в непрерывную часть импульсной системы через ЦАП.
Широкое распространение получили цифровые системы, в которых функцию вычислительного устройства выполняют микропроцессоры и компьютеры.
Синтез цифровых систем сводится к выбору цифрового корректирующего фильтра, последовательное включение которого с непрерывной частью системы, обычно включающей в себя объект управления, регулирующий орган, исполнительный механизм, усилитель мощности и датчик, позволяет получить систему с желаемыми характеристиками. Часто в качестве таких характеристик используют аналоговые эквиваленты: импульсные функции, переходные функции и частотные характеристики, что обосновано при достаточно высокой тактовой частоте работы цифрового вычислителя и большой разрядности преобразователей.
23) Дискретные алгоритмы и дискретная коррекция
Введение в систему корректирующих устройств необходимо, чтобы в результате этого система удовлетворяла заданным требованиям по точности и по качеству процесса управления, в том числе переходных процессов.
Исходя из требований составляются желаемые характеристики импульсной системы. Чтобы их реально получить, в систему вводятся корректирующие устройства. Для коррекции импульсных систем имеется большее разнообразие технических средств, чем у непрерывных систем, так как кроме непрерывных корректирующих устройств можно вводить импульсные и цифровые.
Непрерывная коррекция. В случае непрерывной коррекции изменяют характеристики непрерывной части импульсной системы путем введения либо последовательных или параллельных корректирующих устройств, либо местной отрицательной или положительной обратной связи, в результате чего формируется передаточная функция скорректированной системы.
При расчете непрерывных корректирующих цепей целесообразно перейти от желаемой характеристики импульсной системы к желаемой характеристике ее непрерывной части. После нахождения желаемых характеристик непрерывной части задача синтеза решается так же, как она решалась для обыкновенных линейных систем автоматического управления.