

3.4. Ферродинамические измерительные механизмы.
Ферродинамический измерительный механизм отличается от магнитоэлектрического измерительного механизма тем, что магнитный поток в нём создаётся не постоянным магнитом, а электромагнитом.
Устройство ферродинамического измерительного механизма показано на рис. 3.4.1. Магнитная цепь электромагнита, состоит из ярма 1 и сердечника 2, выполнена из листовой мягкой стали или из прессованного ферромагнитного порошка, обладающего малыми потерями на гистерезис и вихревые токи. Ток в катушках 3, надетых на ярмо, индуцирует (возбуждает, наводит) в воздушном зазоре равномерное радиальное поле, в котором помещена подвижная катушка (рамка) 4, Противодействующий момент создается двумя пружинами 5, одновременно служащими для подвода тока к рамке. Ферродинамический измерительный механизм применяемый для измерений на переменном токе i = Im sin t
где i – мгновенное значение силы переменного тока;
Im - амплитуда переменного тока в данный момент.
При мгновенных значениях тока в рамке и потоке можно написать выражение для мгновенного значения вращающего момента в виде:
МВРt = Bt*S*N*i,
Где: Bt и i — мгновенные значения магнитной индукции в зазоре и тока в рамке; S и N — активная площадь рамки и число витков в рамке.
Положим, что Bt = Вmaxsin α t,
Где: Вmax — максимальная индукция в зазоре; α— угол отклонения; iР = Iр max sin (αt - φ)
Где: I max — максимальный ток в рамке; φ— сдвиг по фазе между током в рамке и магнитным потоком.
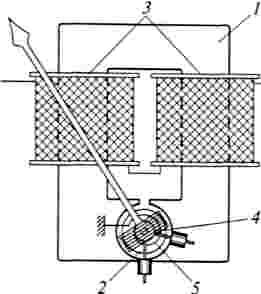
Рис. 3.4.1. Ферродинамический измерительный механизм
1 – ярмо; 2- сердечник, 3- катушки; 4- подвижная катушка;
5 - токоподводы (пружины)
Подвижная часть механизма из-за своей инерционности не может следовать за мгновенными изменениями вращающего момента, и ее отклонение будет пропорционально среднему значению вращающего момента за период Т:
Переходя к действующим значениям, получим:
![]()
Противодействующий момент, создаваемый пружинами:
![]()
Где: W — удельный противодействующий момент пружины;
α — угол отклонения подвижной части.
Установившееся отклонение будет иметь место при равенстве вращающего и противодействующего моментов:
![]()
Откуда:
![]()
Так как индукция в зазоре пропорциональна току в неподвижных катушках, т.е. В = кL IL то
![]() (3.4)
(3.4)
где IL — сила тока в неподвижных катушках; 1Р — сила тока в рамке.
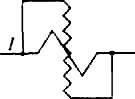
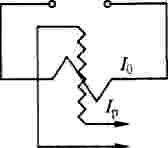
В зависимости от назначения измерительного механизма катушки возбуждения 2 и рамка 1 между собой могут соединяться последовательно (рис. 3.9, а), параллельно (рис. 3.9, б) или же включаться в различные участки измеряемой цепи (например, в случае ваттметра).
Если катушки возбуждения питаются независимо от измерительной цепи и в нее включается лишь рамка измерительного механизма (рис. 3.9, в), то справедлива формула (3.4). В данном случае шкала а= f(Iр)) измерительного механизма получается равномерной.
При соединении катушек последовательно (см. рис. 3.9, а)I1 = I = I,
где I — измеряемый ток и cosψ = 1. Тогда:
![]() (3.5)
(3.5)
При соединении катушек параллельно (см. рис. 3.9, б) токи в катушках будут пропорциональны измеряемому току I: IL = k2 I;
Iр = k 3I. Следовательно:
![]() (3.6)
(3.6)
где: k, k1...k3, — коэффициенты пропорциональности.
Формулы (3.5) и (3.6) показывают, что шкала неравномерная (квадратичная).

а) б)
в)
Рис. 3.4.2. Схемы соединений катушек ферродинамического измерительного механизма:
а) — последовательно (вольтметр); б) — параллельно (амперметр);
в) — независимо (ваттметр);
1 — рамка; 2 —катушки возбуждения