

8.1 Синтезировать последовательное корректирующее устройство вида
Синтезируем последовательное корректирующее устройство с помощью «Оптимизации» МВТУ:
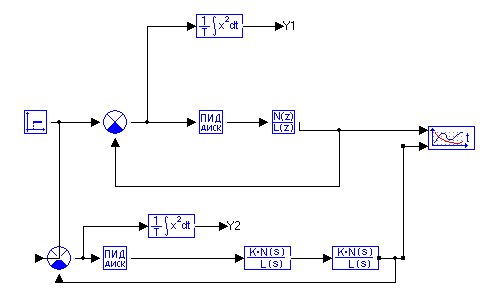
Схема 16 – Структурная схема (оптимизация ПИД для импульсной.mrj)
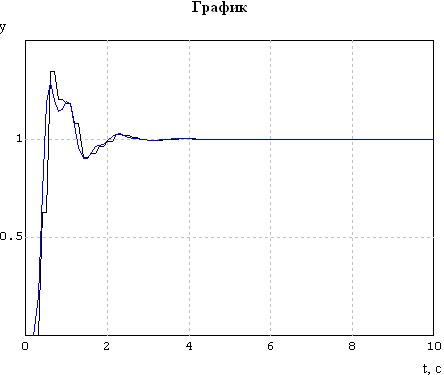
График 22.(оптимизация ПИД для импульсной.mrj)
9. Синтезировать импульсный регулятор состояния из условия минимальной конечной длительности переходного процесса.
Передаточная функция системы:
![]() ;
;

![]() ;
;
![]() ;
;
![]()
![]() ;
;
Блоки
![]() для регулятора:
для регулятора:
Блоки
![]() для
регулятора:
для
регулятора:

Блоки
![]() для регулятора:
для регулятора:
Так
же, заметим, что
![]() и блоки
и блоки
![]() ,
,
![]() используются для того, чтобы график
переходного процесса устанавливался
в 1.
используются для того, чтобы график
переходного процесса устанавливался
в 1.
Схема регулирования в МВТУ и ее график выглядят следующим образом:
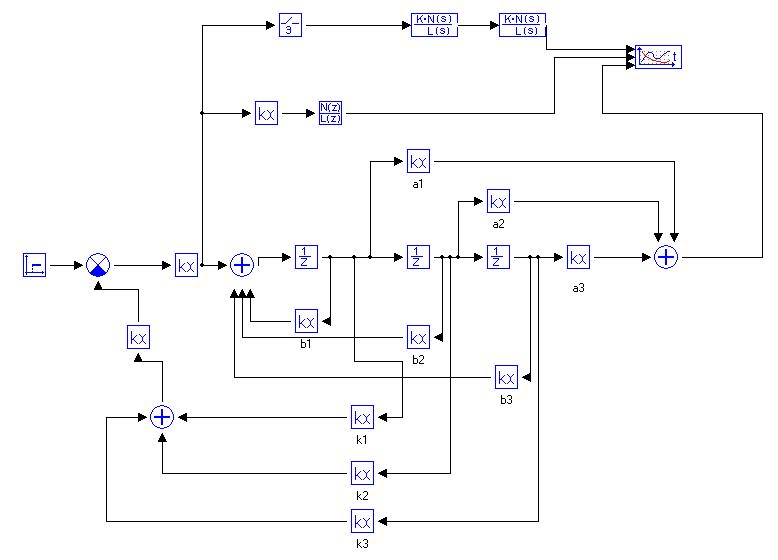
Схема 17 – Структурная схема (регулятор.mrj)
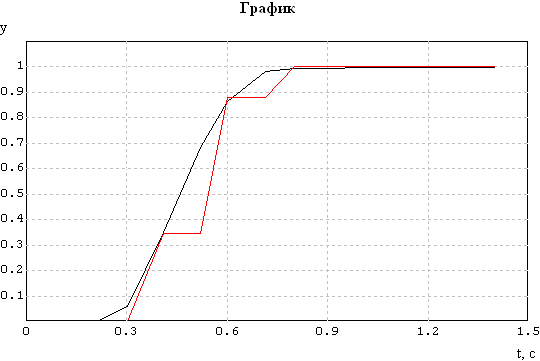
График 23.(регулятор.mrj)
2.10. Построить наблюдатель состояния.
Исходя из полученной векторно-матричной формы наблюдателя состояния, получаем следующее его представление:
![]() ;
;
![]() ;
;
Выберем значения коэффициентов
![]() ,
,
![]() и
и
![]() исходя из условия устойчивости системы.
Устойчивость определим по принадлежности
корней характеристического уравнения
единичному кругу.
исходя из условия устойчивости системы.
Устойчивость определим по принадлежности
корней характеристического уравнения
единичному кругу.
Построим в пакете МВТУ регулятор состояния:
Выберем:
![]()
![]()
Найдем корни данного уравнения:

Все корни лежат внутри единичного круга, следовательно, система устойчива.
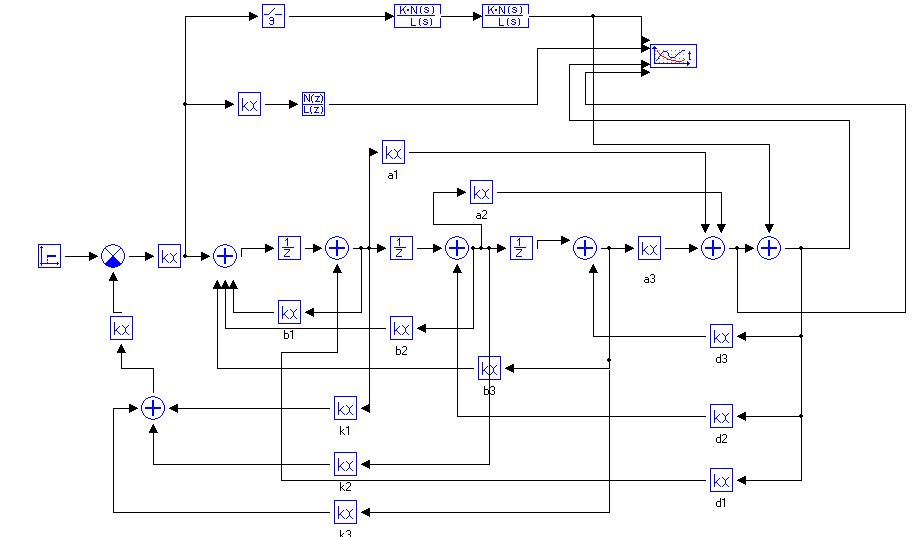
Схема 18 – Структурная схема (наблюдатель.mrj)
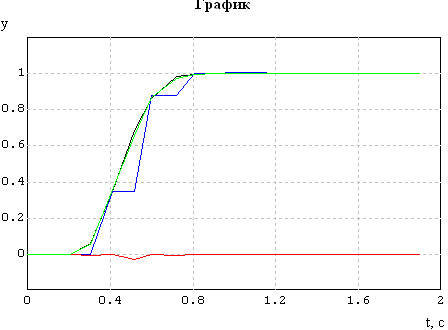
График 24.(наблюдатель.mrj)
11. Построить кривую переходного процесса с использованием векторно-матричного уравнения замкнутой системы.
Уравнение векторно-матричной формы для разомкнутой системы имеет вид:
![]()


Начальные условия:
![]()
1.
 ;
;
2.
 ;
;
 ;
;
3.
 ;
;
 ;
;
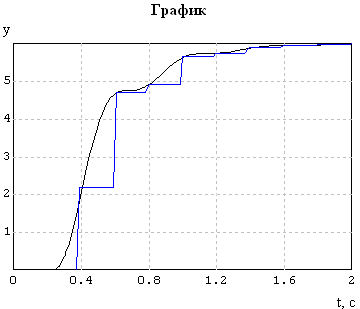
График 25.(импульсная.mrj)
Для замкнутой системы:
Уравнение векторно-матричной формы для замкнутой системы имеет вид:
![]()

Начальные условия:
1.
 ;
;

2.
 ;
;
 ;
;
3.
 ;
;
 ;
;
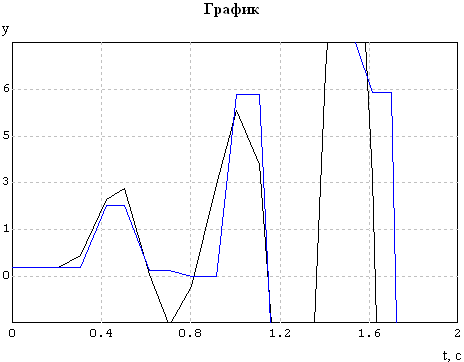
График 26.(ряд Лорана.mrj)