

4. Построить кривые переходного процесса на единичное ступенчатое воздействие по задающему и возмущающему воздействиям. Определить прямые показатели качества.
Преобразуем исходную схему:



Схема 4. Преобразование схемы 3.
![]()
Построим кривую переходного процесса замкнутой системы по задающему воздействию. Передаточная функция замкнутой системы по задающему воздействию будет иметь вид:

![]()
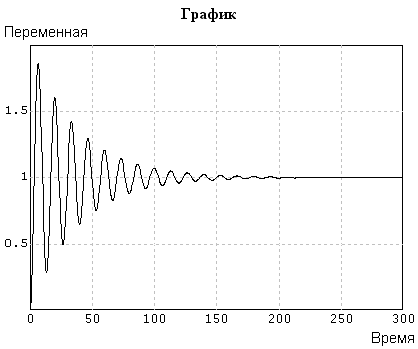
График 2. ( Кривые переходного процесса.mrj)
![]()
Время регулирования:
![]()
Перерегулирование:
![]()
Затухание:
Построим кривую переходного процесса замкнутой системы по возмущающему воздействию. Передаточная функция замкнутой системы по возмущающему воздействию будет иметь вид:


5. С помощью пакета мвту, оптимизируем значения параметров Тку и Кку, по среднеквадратичному критерию.
Собираем следующую схему:

Схема 6. Оптимизация Кку и Тку.mrj.
Задаем параметры оптимизации:

Результаты оптимизации:

В результате оптимизации получаем следующие значения Тку и Кку при которых среднеквадратичная ошибка минимальна: K=48,3816; T=50;
Кривая переходного процесса по задающему воздействию при оптимизированных значениях К и Т:

График 3. Кривая переходного процесса по задающему воздействию после оптимизации. (Оптимизация Кку и Тку(среднеквадратичный критерий).mrj)
Время регулирования:
![]()
Перерегулирование:
![]()
Затухание:
![]()
6. Выполнить пункты 3,4,5 для пропорционально-интегрального корректирующего устройства. Сравнить полученные результаты с результатами п.5. Сделать выводы.
![]()
Передаточная функция разомкнутой цепи по задающему воздействию:
![]()
Характеристическое уравнение замкнутой системы по задающему воздействию:
![]()
Так как
![]() ,
то:
,
то:
![]() .
.
Производим замену
![]() на
на
![]() :
:
![]()
Выделяем вещественную и мнимую часть:
![]()
![]()
Для того чтобы система находилась на границе устойчивости необходимо, чтобы выполнялось равенство нулю мнимой и действительной части характеристического уравнения. Решим следующую систему уравнений:

Из уравнения вещественной
части выражаем
![]() :
:
![]()
Подставляя в уравнение вещественной части получаем:

![]()
График зависимости
![]() от
от
![]() :
:
![]()

График 4. Область устойчивости. (Зависимость Куи от Куп.xls)
Выбираем из области
устойчивости значения:
![]() и
и
![]() .
.
Получаем передаточное
звено корректирующего устройства:
![]()
Строим кривую переходного процесса по задающему воздействию:

Схема 7. Структурная схема с корректирующим устройством (см. 6.1.mrj)

График 5. Кривая переходного процесса по задающему воздействию. (6.1.mrj).
Из графика видно, что выбранная точка действительно соответствует устойчивой работе. Прямые показатели качества:
Время регулирования:
![]()
Перерегулирование:
![]()
Затухание:
![]()

Схема 8. Структурная схема. (6.2.mrj)
Строим кривую переходного процесса по задающему и возмущающему воздействию:

График 6. Кривая переходного процесса по задающему и возмущающему воздействию (6.2.mrj)
Возможно задать пропорционально-интегрирующее звено двумя способами:
1 Способ: Собираем следующую схему для оптимизации:

Схема 9. Структурная схема для оптимизации (Оптимизация 6.3.mrj)
Запускаем редактор глобальных параметров проекта (клавиша F8) и создаем 2 глобальных
переменных К1 и К2 и
присваиваем им ранее выбранные значения
![]() и
соответственно,
делая запись: K1=0.4;K2=10; И нажимаем кнопку
«Применить».
и
соответственно,
делая запись: K1=0.4;K2=10; И нажимаем кнопку
«Применить».
Затем задаем параметры оптимизации, в соответствии с построенной областью допустимых значений:

Критерии оптимизации:

Затем запускаем расчет и получаем следующие результаты оптимизации:

Нажимаем кнопку
«Применить» и в результате оптимизации
получаем следующие значение
![]() и
и
![]() .
При которых среднеквадратичная ошибка
минимальна.
.
При которых среднеквадратичная ошибка
минимальна.
Кривая переходного процесса по задающему воздействию при оптимизированных значениях:

График 7. Кривая переходного процесса по задающему воздействию при оптимизированных значениях (Оптимизация 6.3.mrj)
Прямые показатели качества:
Время регулирования:
![]()
Перерегулирование:
![]()
Затухание:
![]()