

7. Синтезировать новое корректирующее устройство из условия обеспечения следующих показателей качества:
Астатизм первого порядка.
Добротность
по скорости:
![]() .
.
Перерегулирование:
![]() .
.
Время
регулирования:
![]() .
.
Построить кривую переходного процесса.
Неизменяемая часть системы:
![]()
Из выражения
неизменяемой части определим
![]() и
и
![]() :
:

![]() и
и
![]() ,
отсюда
,
отсюда
![]() .
.
2) Строим запретную зону:
![]() -
добротность по скорости
-
добротность по скорости
Проводим
через
![]() прямую под наклоном
прямую под наклоном
![]()
3) Для выполнения требований по точности
поднимем исходную характеристику над
запретной зоной на уровень не менее
![]() .
Полученная характеристика удовлетворяет
требованиям точности.
.
Полученная характеристика удовлетворяет
требованиям точности.
4) По первой номограмме Солодовникова
для
![]() определяем
определяем
![]() .
.
По полученному
![]() по первой номограмме определяем
по первой номограмме определяем
![]() .
.
По заданному
![]() находим
находим
![]()
По второй
номограмме Солодовникова для
![]() вычисляем
вычисляем
![]() -
ордината начала и конца среднечастотного
участка.
-
ордината начала и конца среднечастотного
участка.

5) Строим желаемую ЛФЧХ.
6) Графически вычитаем из Желаемой ЛФЧХ, ЛФЧХ неизменяемой части и получаем ЛФЧХ корректирующего устройства.
7) По графику определяем
![]() :
:
![]() =>
=>![]()
В результате построения получаем следующую передаточную функцию корректирующего устройства:

Собираем схему:

Получаем следующий переходный процесс:

Вывод: Полученное корректирующее устройства обеспечивает заданные показатели качества.
7А. Синтезировать корректирующее устройство частотным методом из условия обеспечения следующих показателей:
1. Астатизм первого порядка;
2. Добротность по скорости: D>200![]() ;
;
3. Время регулирования <0.48c;
Получить передаточную функцию корректирующего устройства (КУ) аналитическим способом и с помощью программного комплекса МВТУ, сравнить полученные результаты.
Построить кривую переходного процесса с учетом нового корректирующего устройства, проверить, как изменились параметры переходного процесса.
Синтез представляет собой подбор параметров для корректирующего устройства согласно эталонной модели, которую можно получить построением желаемой логарифмической амплитудно-частотной характеристики или же использовать уже существующую модель, обладающую требуемыми качествами.

Передаточная
функция корректирующего устройства
эталонной модели:
![]()
Передаточная
функция неизменяемой части:
![]()
Собираем следующую структурную схему:

Схема 10. Структурная схема при частотном методе синтеза КУ (Синтез_1.mrj)
Параметры
корректирующего устройства
![]() задаем как глобальные полиномы N
и D:
задаем как глобальные полиномы N
и D:

Эти полиномы определяем в редакторе глобальных переменных следующим образом:
N[4]=[1 0.0 0.0 0.0 ];
D[4]=[0 0.0 0.0 1.0 ];
Блоки памяти запоминают сигналы:
X – вход для обеих моделей;
Y эт. – выход эталонной модели;
Y мод. – выход реальной модели;
Y ку-вх. - вход синтезируемого КУ;
Y ку-вых. – выход синтезируемого КУ;
Обозначим соответствующие параметры синтеза в закладке «Синтез» - «Частотный метод» и начнем расчет:
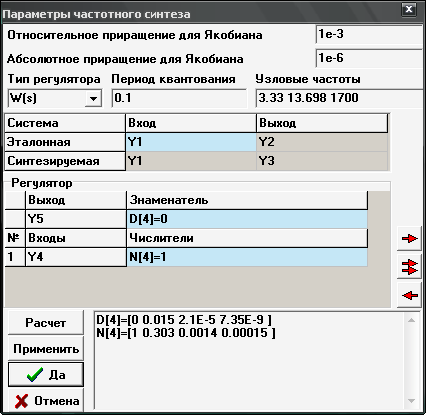
Получаем следующую передаточную функцию корректирующего устройства:
![]()
Получаем следующую переходный процесс:

График 8. Переходный процесс при частотном методе синтеза (Синтез_1.mrj)
Вывод: Синтезированное корректирующее устройство с помощью частотного метода, полностью соответствует по всем показателям качества эталонной модели.
8. Включить на вход апериодического регулятора с параметрами из п.5. нелинейное звено с характеристикой

0.2Кдр
0.2Кдр
= arctg(Nгр)
![]()
![]()
![]()
Линейная часть системы:

Получаем следующую схему:

Схема 11. Структурная схема с нелинейным элементом (НЭ.mrj)

График 9. Кривая переходного процесса для НЭ (НЭ.mrj)
9. Определить устойчивость нелинейной системы по критерию Попова.
Производим
замену в линейной части системы![]() :
:
![]()
Домножаем на комплексно сопряженное число:

Выделяем действительную и мнимую часть:
![]()
![]()
Строим
модифицированный годограф Попова:
![]()

График 10- Критерий Попова
Граничное значения Кгр находится
в точке пересечения годографа и оси
U()
в левой полуплоскости в данном случае
в точке (-43; 0), и т.к.
![]() =>
Кгр=0.023.
=>
Кгр=0.023.