

Раздел 5. Защита рлс от пассивных помех Когерентной обработкой сигнала
Системы защиты РЛС от пассивных помех основаны на использовании различия в скорости перемещения пассивных помех (отражателей) и реальной цели.
А. Когерентный метод обработки при непрерывном излучении сигналп
Когерентный метод обработки при непрерывном излучении сигнала (рис.5.1) использует биения прямого сигнала передатчика, работающего в непрерывном режиме, и сигнала, отраженного от движущейся цели.
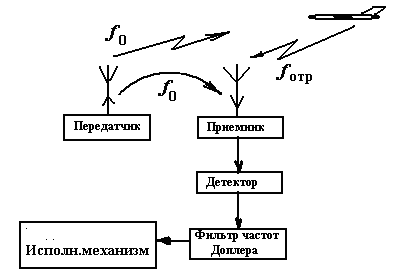
Рис.5.1. Структурная схема РЛ системы селекции
движущихся целей с непрерывным излучением
Этот сигнал когерентный потому, что имеет место строгая связь по времени любой части сигнала с любой другой его частью. Отсюда происходит и название метода: когерентный метод непрерывного излучения.
В РЛС, работающих в непрерывном режиме, подавление пассивных помех может быть достигнуто режекторными (заграждающими) фильтрами помех, при этом спектр сигнала, отраженный от движущейся цели, оказывается вне области режекции.
Б. Когерентный метод обработки при импульсном излучении сигнала
В
РЛС, работающих в импульсном режиме
каждая составляющая спектра
последовательности радиоимпульсов![]() ,
отраженных от приближающейся цели,
будут иметь частоту
,
отраженных от приближающейся цели,
будут иметь частоту
![]()
где
![]() - гармоника спектра радиоимпульсов
передатчика; Vц.р
- радиальная составляющая скорости
цели;
- гармоника спектра радиоимпульсов
передатчика; Vц.р
- радиальная составляющая скорости
цели;
С - скорость распространения радиоволн; Fд - частота Доплера.
Частотный
интервал
![]() между соседними гармониками спектра
отраженного сигнала
между соседними гармониками спектра
отраженного сигнала
![]()
где
![]() - частота зондирующих радиоимпульсов.
- частота зондирующих радиоимпульсов.
Т.о.,
спектр сигнала от движущейся цели
сдвигается в сторону больших частот.
Частотный интервал
между
центральной частотой и первым нулем
спектра отраженной последовательности
радиоимпульсов длительностью
![]() составляет
составляет
![]() ,
,
т.е.
спектр отраженного сигнала от движущейся
цели расширяется. Вместе с этим происходит
изменение и периода следования отраженных
импульсов в результате непосредственного
движения цели за период повторения
![]() на расстояние
на расстояние
![]() ,
,
что соответствует изменению времени запаздывания на величину
![]() .
.
Отраженные
импульсы имеют меньшую длительность
по сравнению с зондирующим,
так как деформация спектра приводит к
деформации сигнала по временной оси на
величину
![]() ,
,
где
![]() .
.
Если цель удаляется от локатора, то все изменения параметров сигнала будут иметь обратный знак.
Для селекции движущейся цели (СДЦ) на фоне помех по радиальной составляющей, изменения частоты и длительности импульса настолько мало, что их непосредственное измерение затруднительно.
Селекция движущейся цели на фоне помех производится по изменению периода следования отраженных импульсов. Однако численное изменение промежутка между импульсами, обусловленное радиальной скоростью, так же невелико.
Деформация сигнала четко фиксируется по изменению фазы колебания высокой частоты принимаемого сигнала от импульса к импульсу.
Если
расстояние до цели остается неизменным
(при
![]() ),
то сдвиг
фаз между
высокочастотными колебаниями излучаемого
и принимаемого сигналов остается
постоянным.
),
то сдвиг
фаз между
высокочастотными колебаниями излучаемого
и принимаемого сигналов остается
постоянным.
Если
цель движется равномерно, то дальность
до цели
за период
посылок
![]() зондирующих импульсов изменяется на
величину
зондирующих импульсов изменяется на
величину
![]() , а изменение
фазы отраженного сигнала за это же время
составит
, а изменение
фазы отраженного сигнала за это же время
составит
![]() ,
где:
,
где:
![]() - частота Доплера,
- частота Доплера,
![]() .
.
Т.о.
фаза
сигналов,
отраженных от цели с радиальной скоростью
отличной от нуля, изменяется на величину,
зависящую от радиальной скорости цели,
длинны волны и частоты посылок зондирующих
импульсов локатора
![]() .
.
Для селекции движущихся целей по признаку фазовых изменений отраженных сигналов необходимо располагать опорным напряжением, фаза которого принимается за эталон.
В качестве эталонного может использоваться либо синусоидальное напряжение специального генератора, входящего в состав системы СДЦ (система СДЦ с внутренней когерентностью), либо сигнал, отраженный неподвижным объектом (система СДЦ с внешней когерентностью).
Один из возможных вариантов структурной схемы системы СДЦ с внутренней когерентностью показан на рис.5.2.
Построение стабильного генератора на несущей частоте РЛС и сравнение фаз на высокой частоте вызывают ряд технических трудностей, генератор опорного напряжения работает и фазируется на промежуточной частоте и называется когерентным гетеродином, а опорное напряжение Uкг – когерентным.
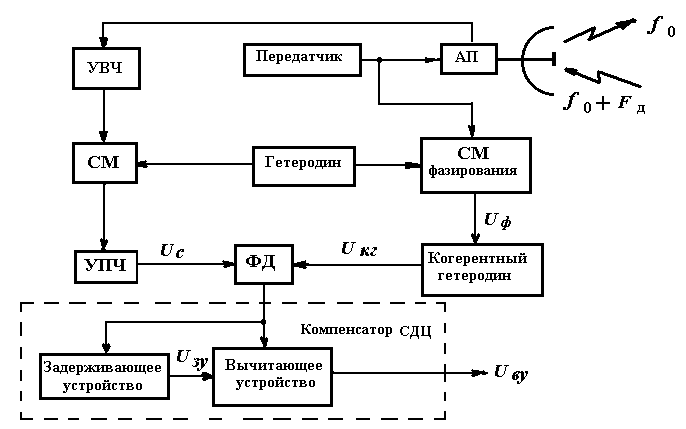
Рис. 5.2. Вариант структурной схемы системы СДЦ
с внутренней когерентностью
Сигналы, формируемые передатчиком РЛС, одновременно подаются на антенну и на выход смесителя фазирующего импульса. Импульсное напряжение промежуточной частоты, фаза которого жестко связана с фазой зондирующего импульса, с выхода смесителя фазирующего импульса Uф подается на когерентный гетеродин, навязывая его колебаниям фазу высокочастотных колебаний передатчика, обеспечивая тем самым эталонность фазы опорного напряжения.
Отраженные импульсы, имеющие частоту fo Fд, усиливаются усилителем высокой частоты и попадают на смеситель сигнала, на выходе которого формируется напряжение fп Fд. Фаза отраженного сигнала Uс сравнивается с фазой частоты когерентного гетеродина Uкг на фазовом детекторе.
Фазовый детектор, реагируя на изменение модуля геометрической суммы напряжений отраженного сигнала и когерентного гетеродина (рис.5.3а), осуществляет преобразование фазовых изменений отраженного сигнала в амплитудные.
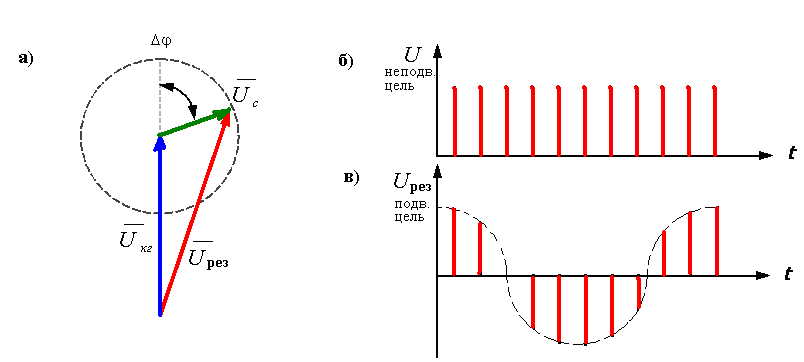
Рис. 5.3. Характер изменения напряжения на выходе фазового детектора:
а) - векторная диаграмма;
б) - напряжение на выходе ФД при приеме сигнала от неподвижной цели;
в) - сигнал от движущейся цели