

Возникновение “слепых” скоростей и их влияния на работу рлс
Напряжение на выходе фазового детектора для неподвижных целей будет неизменным (рис.5.3б), а для движущихся целей будет изменяться (рис.5.3в).
Если фаза отраженного сигнала относительно когерентного за период посылок изменяется на четное число , то амплитуда импульсов на выходе фазового детектора не меняется.
Радиальные скорости цели и частоты Доплера, при которых наблюдается это явление, называются “слепыми”:
![]() .
.
где
-
![]() -
период посылок.
-
период посылок.
![]() -
номер гармоники спектра радиоимпульсов
передатчика.
-
номер гармоники спектра радиоимпульсов
передатчика.
“Слепая” скорость опасна тем, что сигналы от цели, обладающие такой скоростью, так же, как и сигналы от местного неподвижного предмета, подавляются.
Из формулы “слепых“ скоростей
![]() ,
,
следует,
что их уменьшение
(т.e.
- уменьшение их влияния на работу РЛС)
достигается изменением периода повторения
зондирующих импульсов
![]() .
.
При
приеме сигналов от подвижных и неподвижных
объектов, с выхода фазового детектора
импульсы поступают на компенсационную
часть системы СДЦ, которая подавляет
импульсы только с постоянной амплитудой
(сигналы от местных предметов или
дипольных отражателей) и сохраняет
импульсы, имеющие существенно изменяющуюся
амплитуду (сигналы, отраженные от
подвижных целей). Компенсационная часть
содержит задерживающее и вычитающее
устройства. Импульсные сигналы с фазового
детектора проходят на один из выходов
вычитающего устройства без задержки,
а на другой – с задержкой на период
посылок
![]() (рис.5.4).
(рис.5.4).

Рис. 5.4. Структурная схема компенсирующего устройства
Если сигналы приняты от пассивных помех, тогда вычитающим устройством будут скомпенсированы практически все импульсы, останутся некомпенсированными только первый и последний импульсы пачки отраженных импульсов (рис.5.5).

Рис.5.5. К работе компенсатора СДЦ
При приеме сигналов от движущейся цели в результате вычитания из незадержанной пачки импульсов задержанной на время на выходе вычитающего устройства формируются импульсы, амплитуда которых отлична от нуля (рис.5.5,г).
Когерентно-импульсные системы малой скважности
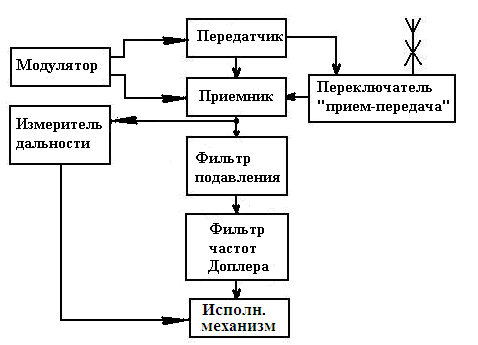
Рис.5.6. Структурная схема когерентно-импульсной
системы малой скважности
Системы измерения дальности, построенные по принципу разделения во времени работы передающего и приемного устройств РЛС называются когерентно-импульсными системами малой скважности.
На
структурной схеме системы (рис.5.6)
модулятор попеременно включает
передатчик и
приемник на
одинаковое время
![]() ,
где Тп
— период
повторения. Следовательно, длительность
излучаемых импульсов будет равна
(рис.5.7,а).
,
где Тп
— период
повторения. Следовательно, длительность
излучаемых импульсов будет равна
(рис.5.7,а).
Отраженные сигналы на входе приемника будут иметь такую же длительность (рис.5.7, б).

Рис.5.7. Временные диаграммы, поясняющие работу когерентно-импульсной
системы малой скважности
Т.к.
приемник отпирается периодически на
время
![]() ,
отраженные
сигналы на выходе его оказываются
укороченными на величину
,
отраженные
сигналы на выходе его оказываются
укороченными на величину
![]() (рис.5.7, в).
(рис.5.7, в).
Длительность выходных сигналов приемника (рис.5.7, г)
![]() .
.
Т.о., по длительности выходных сигналов приемника можно судить о дальностях до целей.
Селекция сигналов, отраженных от движущихся целей, основана на отличии спектров этих сигналов от спектров сигналов, отраженных от неподвижных целей.
При помощи детектора приемного устройства отраженные сигналы сравниваются по фазе с высокочастотными колебаниями передатчика (точнее его задающего генератора), которые используются в качестве опорного сигнала.


Рис.5.8. Принцип селекции сигналов, отраженных от движущихся целей для когерентно-импульсных систем малой скважности:
а - спектральный состав выходных сигналов детектора при отражении от неподвижного объекта;
б - спектральный состав выходных сигналов при отражении от движущейся цели;
в - амплитудно-частотная характеристика гребенчатого фильтра подавления;
г - частотная характеристика фильтра частот Доплера;
д - сигнал, поступающий на вход индикаторного (исполнительного) устройства
Спектральный состав выходных сигналов детектора при отражении от неподвижного объекта показан на рис.5.8,а, а при отражении от движущейся цели - на рис.5.8,б.
Отличие
спектров этих сигналов заключается в
том, что сигналы от неподвижных целей
имеют составляющие, кратные только
частоте повторения Fn
=![]() (kFn),
в
то время как сигналы от движущихся
целей, кроме последних, содержат еще
составляющие типа kFn
± Fд,
где k
= 0, 1,2, 3...
(kFn),
в
то время как сигналы от движущихся
целей, кроме последних, содержат еще
составляющие типа kFn
± Fд,
где k
= 0, 1,2, 3...
Избавиться от сигналов, отраженных от неподвижных объектов возможно подавлением всех спектральных составляющих типа kF n. Для чего , после детектора включается гребенчатый фильтр подавления, амплитудно-частотная характеристика которого изображена на рис.5.8, в.
Отфильтрованные составляющие сигналов, отраженных от движущихся целей, поступают на фильтр частот Доплера, ширина полосы пропускания которого соответствует диапазону возможных скоростей движения целей (рис.5.8,г). Т.о., на индикаторное (исполнительное) устройство попадают только сигналы от движущихся целей (рис.5.8,д).