

Когерентно-импульсные системы с высокой скважностью
Когерентно-импульсный метод с высокой скважностью сочетает особенности обычного импульсного режима радиолокатора (с малой скважностью) с доплеровским методом селекции сигналов. В основе когерентно-импульсного метода лежит использование эффекта Доплера при импульсной работе радиолокатора.
Для селекции движущихся целей в данном случае, как и при непрерывном доплеровском методе, используется информация о разности фаз между принятым сигналом и специальным опорным напряжением, которое когерентно с излученным сигналом. Определение дальности до цели производится так же, как и при обычном импульсном методе.
Раздел 6. Особенности сдц при взаимном перемещении рлс и облака пассивных помех
Если когерентно-импульсный РЛ расположен на движущихся объектах (самолет, корабль, ракета и т. д.) работающий по движущимся целям на фоне малоподвижных пассивных помех возникают трудности компенсации мешающих отражений, т.к. отраженные сигналы от таких помех, на выходе фазового детектора оказываются промодулированными по амплитуде с частотой Доплера, величина которой определяется скоростью движения РЛС.
Перемещение
мешающих отражателей характеризуется
некоторым значением средней
радиальной скорости
![]() .,
при котором спектр высокочастотного
отраженного сигнала смещается на
доплеровскую поправку частоты
.,
при котором спектр высокочастотного
отраженного сигнала смещается на
доплеровскую поправку частоты
![]() ,
а спектральные
полосы дополнительно (в сравнении
со случаем неподвижных объектов)
расширяются в соответствии со спектром
флуктуации сигналов. В подобных случаях
взаимные перемещения когерентно-импульсного
РЛС и мешающего объекта должны
компенсироваться еще до
фазового детектирования сигналов.
Для этого необходимо
обеспечить неизменность разности фаз
сравниваемых напряжений на входе
фазового детектора от периода к периоду
повторения импульсов.
Это можно
достигнуть только изменением
фазы когерентного напряжения,
аналогичным изменению фазы отраженного
сигнала
,
а спектральные
полосы дополнительно (в сравнении
со случаем неподвижных объектов)
расширяются в соответствии со спектром
флуктуации сигналов. В подобных случаях
взаимные перемещения когерентно-импульсного
РЛС и мешающего объекта должны
компенсироваться еще до
фазового детектирования сигналов.
Для этого необходимо
обеспечить неизменность разности фаз
сравниваемых напряжений на входе
фазового детектора от периода к периоду
повторения импульсов.
Это можно
достигнуть только изменением
фазы когерентного напряжения,
аналогичным изменению фазы отраженного
сигнала
![]() (6.1)
(6.1)
Если фаза напряжения когерентного гетеродина изменяется в каждом периоде повторения импульсов в соответствии с радиальной скоростью движения источника помех (6.1), то разность фаз напряжений полезного сигнала и когерентного гетеродина в каждом цикле работы РЛС остается для данной отражающей цели неизменной.
Вместе
с тем фаза сигналов от местных предметов,
являющихся неподвижными относительно
РЛС, в каждом периоде повторения импульсов
также смещается на величину вводимой
поправки ±Ωд.n
t,
в результате
чего отраженные от них сигналы на выходе
фазового детектора будут промодулированы
по амплитуде частотой Доплера. Другими
словами, местные предметы оказываются
как бы движущимися относительно РЛС с
радиальной скоростью
![]() .
Сигналы, отраженные от местных предметов
будут выделены, например, индикаторами.
.
Сигналы, отраженные от местных предметов
будут выделены, например, индикаторами.
Фазы
сигналов, отраженных от движущихся
целей, также получают поправку ±Ωдn
t,
в результате
чего фазовая флуктуация этих сигналов
теперь уже будет соответствовать не
действительной радиальной скорости
движения целей, а радиальной скорости
![]() .
.
Так как начальная фаза сигнала когерентного гетеродина жестко связана с начальной фазой зондирующего импульса передатчика РЛС, то изменение фазы когерентного напряжения от цикла к циклу работы РЛС возможно только за счет изменения частоты когерентного гетеродина на величину доплеровской поправки
![]()
Последнее может быть осуществлено с помощью дополнительного преобразователя частоты, как показано на рис.6.1.
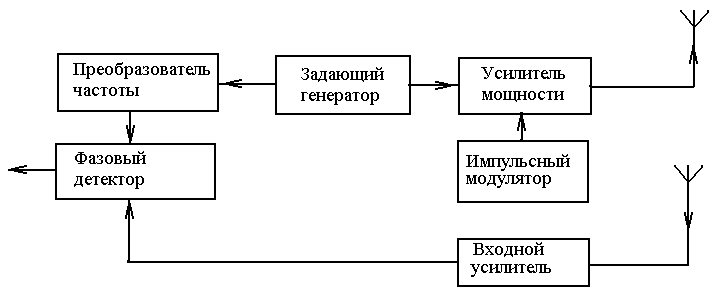
Рис.6.1. Схема введения доплеровской поправки с помощью дополнительного преобразователя частоты
Однако, при таком преобразовании вводимая доплеровская поправка частоты весьма мала в сравнении с частотой опорного (когерентного) напряжения и простое разрешение преобразованных и не преобразованных опорных колебаний с помощью фильтра на входе фазового детектора практически невозможно. Поэтому осуществляется двойное преобразование частоты (рис.6.2).
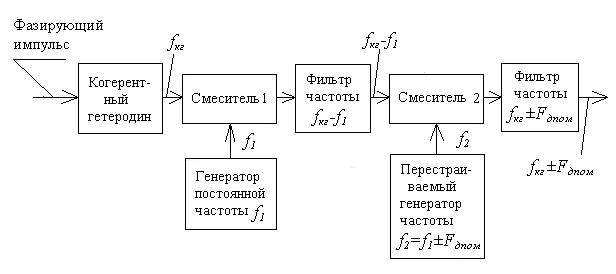
Рис.6.2. Структурная схема устройства введения поправки Доплера на частоту
когерентного гетеродина путем двойного «смешивания» частот
Преобразователь состоит из двух гетеродинов, один из которых является перестраиваемым, и двух смесителей с фильтрами на выходе.
Принцип работы – см. рис.6.3.
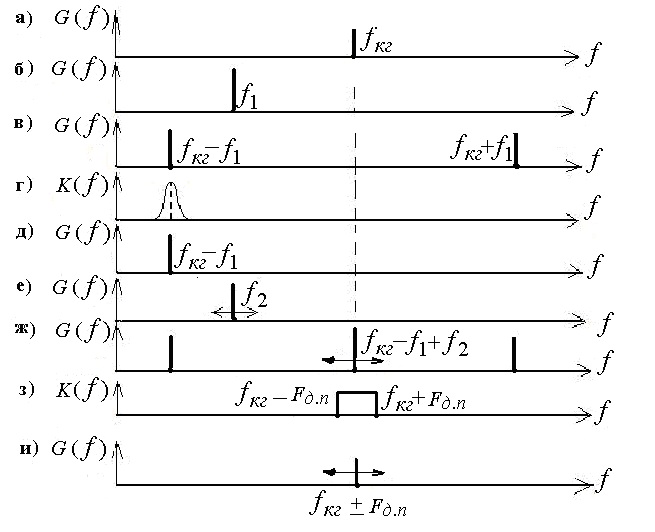
Рис.6.3. Графики, поясняющие принцип введения поправки Доплера на частоту когерентного гетеродина путем двойного «смешивания» частот
В первом смесителе 1 происходит первое «смешивание» частот: на смеситель подаются сигналы когерентного гетеродина (рис.6.3,а) и генератора постоянной частоты f1 (рис.6.3,б).
Из ряда комбинационных составляющих, образующихся при биении частот fкг и f1 (рис.6.З,в), фильтр (амплитудно-частотная характеристика которого показана на рис.6.З,г) выделяет частоту f кг — f 1 (рис.6.3,д).
Во - втором смесителе 2 осуществляется второе «смешивание» частот: частоты f кг - f1 и частоты f2 перестраиваемого генератора (рис.6.З,е).
В результате биения частот (f кг- f1) и f2 также образуется ряд комбинационных составляющих (рис.6.З,ж), из которых фильтр (амплитудно-частотная характеристика которого показана на рис.6.З,з) пропускает только частоту (рис.6.3,и)
![]() .
.
Этот способ введения поправки Доплера на частоту когерентного гетеродина получил широкое практическое применение.
Недостаток рассмотренного способа введения поправки Доплера на частоту когерентного гетеродина - некоторая громоздкость устройства введения поправки (два отдельных генератора, два смесителя с фильтрами).