

1.2. Кинематические цепи
Кинематической цепью называется совокупность звеньев, соединенных в кинематические пары. Кинематические цепи подразделяются на простые, сложные, замкнутые, незамкнутые.
Простой кинематической цепью называется такая, у которой каждое звено входит не более чем в две кинематические пары (рис. 1.2). Кривошипно-шатунный механизм состоит из неподвижного звена – стойки и трех подвижных – 1, 2, 3. Кинематические пары: 1-0, 1-2, 2-3, 3-0. Каждое звено входит не более чем в две кинематические пары.
|
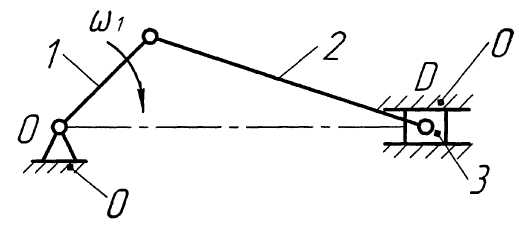
Рис. 1.2. Кинематическая схема кривошипно-шатунного механизма
Таблица 1.1
Схематические и условные изображения кинематических пар
Схематическое изображение кинематических пар |
Условное изображение |
Число условий связи |
Количество свобод относительного движения |
Класс кинематической пары |
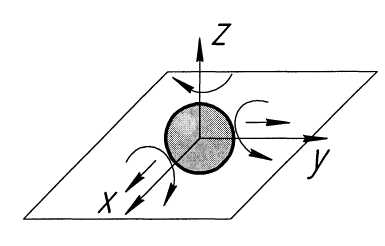
Шар на плоскости |
|
1 |
5 |
1 |
|
||||
Цилиндр на плоскости |
|
2 |
4 |
2 |
|

Продолжение табл. 1.1
Схематическое изображение кинематических пар |
Условное изображение |
Число условий связи |
Количество свобод относительного движения |
Класс кинематической пары |
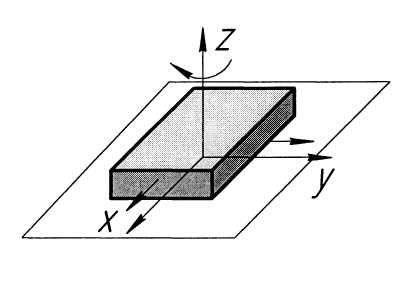
Призма на плоскости |
|
3 |
3 |
3 |
|
||||
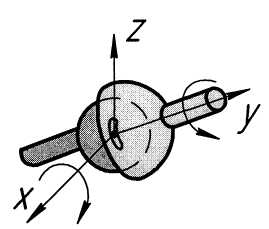
Сферическая |
|
3 |
3 |
3 |
|
||||
Сферическая с пальцем |
|
4 |
2 |
4 |
|
||||
Цилиндрическая |
|
4 |
2 |
4 |
|
||||
Вращательная |
|
5 |
1 |
5 |
|
||||
Поступательная |
|
5 |
1 |
5 |
|
||||
Винтовая |
|
5 |
1 |
5 |
|






Сложной называется такая кинематическая цепь, у которой имеется хотя бы одно звено, входящее более чем в две кинематические пары (рис. 1.1). Звено 2 входит в следующие кинематические пары 1-2, 2-3, 2-4.
Замкнутой кинематической цепью называется цепь, каждое звено которой входит, по крайней мере, в две кинематические пары (рис. 1.1, 1.2).
Незамкнутой кинематической цепью называется цепь, у которой есть звенья, входящие только в одну кинематическую пару (рис. 1.3). Звено 5 входит только в одну кинематическую пару 4-5.
|

Рис. 1.3. Кинематическая схема манипулятора