

5. Контрольные вопросы
1. |
С какой целью проводится структурный анализ плоских механизмов? |
|
2. |
Что называют звеном, кинематической парой, кинематической цепью? |
|
3. |
3.Каким образом определяют класс кинематической пары и механизма? |
|
4. |
Как определяют число степеней свободы механизма? |
|
5. |
Какие кинематические цепи называют структурными группами Асура и по какому принципу составляется схема любого механизма? |
|
6. |
Порядок проведения структурного анализа плоского механизма и выводы по его результатам. |
|
7. |
Задачи, решаемые при кинематическом анализе плоского механизма. |
|
8. |
Что понимают под масштабным коэффициентом и как он формируется для длин звеньев, скоростей и ускорений. |
|
9. |
Метод планов для определения скоростей точек звеньев и угловых скоростей звеньев. |
|
10. |
Как определить натуральную величину скорости некоторой точки звена и угловую скорость звена, используя план скоростей? |
|
11. |
Метод планов для определения ускорений точек звеньев и угловых ускорений звеньев. |
|
12. |
Методика определения сил в кинематических парах. |
|
13. |
Кинетостатический расчет механизма без учета сил трения (на примере одной из групп Ассура). |
|
|
13.1. |
Активные и реактивные силы, действующие на звенья диады. |
|
13.2. |
Вычисление сил инерции и моментов сил инерции. |
|
13.3. |
Определение реакций с использованием уравнений равновесия. |
|
13.4. |
Масштабный коэффициент сил. |
|
13.5. |
Векторное уравнение сил и его решение путем построения плана скоростей. |
14. |
Определение уравновешивающей силы для плоского рычажного механизма. |
|
6. Условие и варианты второго домашнего задания
Вариант задания выбирается по последней цифре шифра, а вариант числовых данных – по предпоследней (задания 0…9).
Условие. По заданным исходным данным выполнить расчеты и проектирование узла тихоходного вала редуктора в объеме, приведенном в содержании задания.
Содержание второго задания
1. |
Подбор электродвигателя привода. |
||
|
1.1. |
Определение потребной мощности электродвигателя. |
|
|
1.2. |
Определение предполагаемой частоты вращения электродвигателя. |
|
|
1.3. |
Подбор электродвигателя по двум условиям:
а)
б)
|
|
2. |
Определение общего передаточного числа привода и его разбивка по передачам. |
||
3. |
Определение
мощности (Р),
частоты вращения (n),
угловой скорости ( |
||
4. |
Расчет цилиндрической зубчатой передачи редуктора. |
||
5. |
Проектный расчет валов и их эскизы. |
||
6. |
Подбор типа подшипников качения и схемы их установки. |
||
7. |
Компоновка редуктора. |
||
8. |
Конструирование узла вала, определение размеров деталей узла. |
||
9. |
Расчет шпоночных соединений. |
||
10. |
Расчет подшипников на заданный ресурс. |
||
|
10.1. |
Составление расчетной схемы сил. |
|
|
10.2. |
Определение реакций опор. |
|
11. |
Определение марки масла для зубчатой передачи редуктора. |
||
12. |
Посадки в сопряжениях. |
||
13. |
Сборка и регулировка узла вала. |
||
14. |
Спецификация к сборочному чертежу вала. |
||
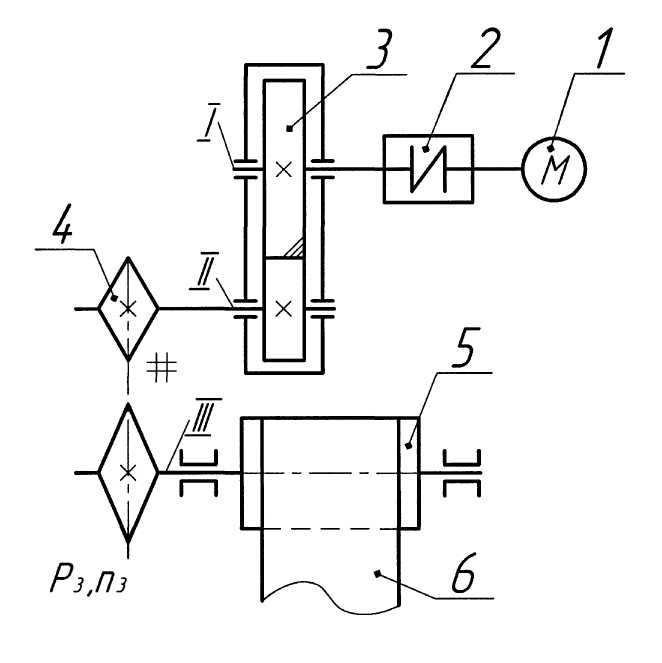
Задание 0 Привод к ленточному конвейеру Кинематическая схема |
||||||||||
|
||||||||||
1 – электродвигатель; 2 – клиноременная передача; 3 – редуктор цилиндрический; 4 – муфта упругая; 5 – барабан; 6 – лента конвейера
|
||||||||||
Исходные данные |
Варианты |
|||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
0 |
|
Тяговое усилие F, кН |
2 |
4 |
6 |
8 |
10 |
1,5 |
3,5 |
5,5 |
7,5 |
9,5 |
Скорость ленты V, |
1 |
1,2 |
0,8 |
1,4 |
1,2 |
1,3 |
1,5 |
1,1 |
1,2 |
1,6 |
Диаметр барабана D, м |
0,2 |
0,25 |
0,2 |
0,45 |
0,4 |
0,375 |
0,275 |
0,6 |
0,65 |
0,2 |
Срок службы t |
32 |
16 |
8 |
6 |
4 |
3 |
30 |
15 |
9 |
7 |
Режим нагружения |
0 |
I |
II |
III |
IV |
V |
0 |
I |
II |
III |
Вариант ТО |
I |
II |
III |
IV |
I |
II |
III |
IV |
I |
II |

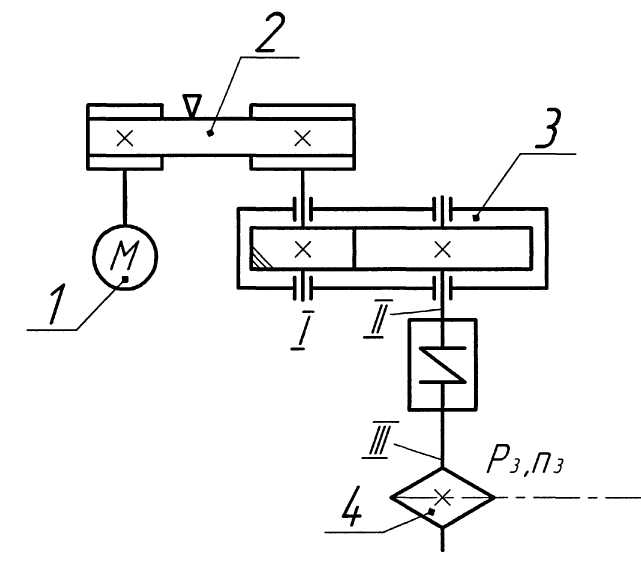
Задание 1 Привод к мешалке Кинематическая схема |
||||||||||
|
||||||||||
1 – электродвигатель; 2 – ограждение; 3 – клиноременная передача; 4 – цилиндрический редуктор; 5 – муфта упругая с торообразной оболочкой; 6 – мешалка; 7 – смесь; 8 – задвижка
|
||||||||||
Исходные данные |
Варианты |
|||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
0 |
|
Момент сопротивления
вращению T,
|
0,15 |
0,18 |
0,20 |
0,25 |
0,27 |
0,30 |
0,32 |
0,34 |
0,38 |
0,40 |
Частота вращения
мешалки n,
|
60 |
65 |
70 |
75 |
80 |
70 |
65 |
60 |
70 |
80 |
Допускаемое отклонение
скорости мешалки
|
5 |
4 |
6 |
7 |
3 |
4 |
7 |
5 |
6 |
4 |
Срок службы привода t , ч |
20 |
12,5 |
9 |
6,3 |
4 |
20 |
12,5 |
9 |
6,3 |
4 |
Режим нагружения |
I |
II |
III |
IV |
V |
I |
II |
III |
IV |
V |
Вариант ТО |
I |
II |
III |
IV |
V |
I |
II |
III |
IV |
V |

Задание 2 Привод к ленточному конвейеру Кинематическая схема |
||||||||||
|
||||||||||
1 – электродвигатель; 2 – муфта упругая; 3 –редуктор цилиндрический; 4 – цепная передача; 5 – барабан; 6 – лента конвейера
|
||||||||||
Исходные данные |
Варианты |
|||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
0 |
|
Мощность на ведущей
звездочке |
10 |
12 |
13 |
9 |
7 |
5 |
4 |
2,5 |
1,5 |
14 |
Частота вращения
|
150 |
200 |
300 |
250 |
350 |
100 |
200 |
250 |
150 |
80 |
Срок службы t , ч |
9 |
6,3 |
12,5 |
15 |
18 |
20 |
12,5 |
6,3 |
9 |
12,5 |
Режим нагружения |
II |
III |
II |
I |
I |
I |
II |
III |
II |
II |
Вариант ТО |
III |
II |
I |
II |
I |
IV |
III |
II |
IV |
II |
Задание 3 Привод к подвесному конвейеру Кинематическая схема |
||||||||||
|
||||||||||
1 – электродвигатель; 2 – клиноременная передача; 3 –редуктор цилиндрический; 4 –ведущая звездочка конвейера
|
||||||||||
Исходные данные |
Варианты |
|||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
0 |
|
Мощность на ведущей
звездочке |
12 |
13 |
11 |
14,5 |
18 |
12,5 |
18 |
19 |
21 |
20 |
Частота вращения
|
310 |
210 |
140 |
160 |
180 |
250 |
260 |
300 |
180 |
250 |
Срок службы t , ч |
9 |
6,3 |
12,5 |
15 |
18 |
20 |
12,5 |
6,3 |
9 |
12,5 |
Режим нагружения |
II |
III |
II |
I |
I |
I |
II |
III |
II |
II |
Вариант ТО |
I |
II |
III |
IV |
V |
II |
III |
IV |
V |
IV |
Задание 4 Привод к ковшовому элеватору Кинематическая схема |
||||||||||
|
||||||||||
1 – электродвигатель; 2 – клиноременная передача; 3 –редуктор цилиндрический; 4 – муфта упругая; 5 – барабан; 6 – лента с ковшами
|
||||||||||
Исходные данные |
Варианты |
|||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
0 |
|
Тяговое усилие F, кН |
1 |
2,8 |
1,3 |
2,6 |
1,5 |
2,2 |
1,5 |
2 |
1,8 |
2,4 |
Скорость ленты V, |
1,2 |
1,7 |
1,2 |
1,3 |
0,9 |
1,5 |
0,8 |
1,6 |
1,1 |
1,3 |
Диаметр барабана D, м |
0,25 |
0,3 |
0,2 |
0,375 |
0,25 |
0,275 |
0,4 |
0,3 |
0,2 |
0,375 |
Срок службы t , ч |
8 |
14 |
25 |
6 |
9 |
28 |
3 |
8 |
30 |
16 |
Режим нагружения |
II |
I |
0 |
III |
II |
0 |
IV |
II |
0 |
I |
Вариант ТО |
I |
II |
III |
IV |
IV |
III |
II |
I |
I |
II |

Задание 5 Привод к ленточному конвейеру Кинематическая схема |
||||||||||
|
||||||||||
1 – электродвигатель; 2 – клиноременная передача; 3 –редуктор цилиндрический; 4 – муфта цепная; 5 – барабан; 6 – лента конвейера
|
||||||||||
Исходные данные |
Варианты |
|||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
0 |
|
Тяговое усилие F, кН |
1,2 |
1,6 |
1,8 |
2,0 |
2,2 |
2,4 |
2,6 |
2,8 |
3,0 |
3,2 |
Скорость ленты V, |
0,8 |
0,9 |
1,0 |
1,1 |
1,1 |
1,2 |
1,2 |
1,3 |
1,4 |
1,5 |
Диаметр барабана D, м |
200 |
200 |
225 |
225 |
250 |
250 |
275 |
275 |
250 |
250 |
Допускаемое отклонение скорости ленты , % |
4 |
4 |
5 |
7 |
6 |
3 |
5 |
4 |
3 |
6 |
Срок службы t , ч |
30 |
14 |
8 |
6 |
3 |
28 |
15 |
9 |
7 |
4 |
Режим нагружения |
0 |
I |
II |
III |
IV |
0 |
I |
II |
III |
IV |
Вариант ТО |
IV |
III |
II |
I |
IV |
III |
II |
I |
II |
I |

Задание 6 Привод к ковшовому элеватору Кинематическая схема |
||||||||||
|
||||||||||
1 – электродвигатель; 2 – муфта упругая; 3 – редуктор цилиндрический; 4 – цепная передача; 5 – барабан; 6 – лента с ковшом
|
||||||||||
Исходные данные |
Варианты |
|||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
0 |
|
Тяговое усилие F, кН |
2,5 |
3 |
5,5 |
3,8 |
4 |
2 |
4,5 |
2 |
3,2 |
3,8 |
Скорость ленты V, |
1,1 |
1,2 |
0,9 |
1,5 |
1,25 |
1 |
1,5 |
1,1 |
1 |
1,4 |
Диаметр барабана D, м |
0,375 |
0,2 |
0,25 |
0,3 |
0,275 |
0,25 |
0,2 |
0,275 |
0,3 |
0,25 |
Срок службы t , ч |
6 |
10 |
4 |
8 |
5 |
3 |
14 |
9 |
5 |
28 |
Режим нагружения |
III |
II |
IV |
II |
III |
IV |
I |
II |
III |
0 |
Вариант ТО |
I |
II |
III |
III |
II |
I |
I |
II |
III |
IV |

Задание 7 Привод галтовочного барабана для снятия заусенцев после штамповки Кинематическая схема |
||||||||||
|
||||||||||
1 – электродвигатель; 2 – ременная передача поликлиновым ремнем; 3 – редуктор цилиндрический; 4 – муфта цепная; 5 – галтовочный барабан
|
||||||||||
Исходные данные |
Варианты |
|||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
0 |
|
Окружная сила на барабане F, кН |
0,5 |
0,8 |
1,0 |
1,0 |
0,7 |
0,8 |
0,9 |
1,1 |
1,2 |
0,5 |
Окружная скорость на барабане V, |
2,0 |
2,5 |
2,0 |
2,5 |
3,5 |
3,0 |
3,0 |
2,5 |
2,0 |
3,0 |
Диаметр барабана D, м |
400 |
400 |
600 |
600 |
800 |
800 |
900 |
900 |
800 |
800 |
Допускаемое отклонение скорости барабана , % |
3 |
4 |
5 |
5 |
4 |
4 |
3 |
4 |
4 |
5 |
Срок службы t , ч |
30 |
12,5 |
6,3 |
4 |
28 |
14 |
12,5 |
6,3 |
4 |
12,5 |
Режим нагружения |
0 |
II |
III |
IV |
0 |
I |
II |
III |
IV |
II |
Вариант ТО |
I |
II |
I |
II |
III |
I |
III |
II |
I |
II |

Задание 8 Привод к ленточному конвейеру Кинематическая схема |
||||||||||
|
||||||||||
1 – электродвигатель; 2 – муфта упругая; 3 – редуктор цилиндрический; 4 – цепная передача; 5 – барабан; 6 – лента конвейра
|
||||||||||
Исходные данные |
Варианты |
|||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
0 |
|
Тяговое усилие F, кН |
3 |
5 |
7 |
9 |
11 |
2,5 |
4,5 |
5,5 |
1,5 |
7,5 |
Скорость ленты V, |
3 |
1 |
3 |
2,5 |
1,5 |
0,8 |
0,9 |
1,1 |
1,5 |
4 |
Диаметр барабана D, м |
0,225 |
0,3 |
0,4 |
0,5 |
0,55 |
0,6 |
0,65 |
0,2 |
0,275 |
0,4 |
Срок службы t , ч |
7 |
8 |
15 |
5 |
4 |
6 |
6 |
9 |
16 |
8 |
Режим нагружения |
III |
II |
I |
IV |
V |
IV |
III |
II |
I |
II |
Вариант ТО |
III |
I |
II |
II |
I |
III |
II |
I |
III |
IV |

Задание 9 Привод к скребковому конвейеру Кинематическая схема |
||||||||||
|
||||||||||
1 – электродвигатель; 2 – плоскоременная передача; 3 – редуктор цилиндрический; 4 – упругая муфта с торообразной оболочкой; 5 – ведущая звездочка конвейера; 6 – тяговая цепь
|
||||||||||
Исходные данные |
Варианты |
|||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
0 |
|
Тяговая сила цепи F, кН |
2,0 |
2,4 |
2,6 |
2,8 |
3,0 |
3,5 |
3,7 |
4,0 |
4,4 |
4,8 |
Скоростьтяговой цепи V, |
0,5 |
0,6 |
0,65 |
0,55 |
0,55 |
0,6 |
0,6 |
0,5 |
0,65 |
0,65 |
Шаг тяговой цепи p, мм |
80 |
100 |
100 |
80 |
80 |
100 |
80 |
80 |
100 |
80 |
Число зубьев звездочки z |
7 |
8 |
7 |
8 |
9 |
7 |
9 |
7 |
7 |
8 |
Допускаемое отклонение скорости тяговой цепи , % |
4 |
5 |
6 |
5 |
6 |
5 |
4 |
6 |
6 |
5 |
Срок службы t , ч |
15 |
8 |
6,3 |
16 |
10 |
4 |
25 |
18 |
6,3 |
12,5 |
Режим нагружения |
0 |
II |
III |
I |
II |
IV |
0 |
I |
III |
II |
Вариант ТО |
I |
II |
I |
III |
I |
IV |
I |
III |
II |
I |
