

Рябинин К.Б. Обработка и распознавание трехмерных изображений групповых точечных объектов и точечных полей на базе их кв
.pdf11
После процедуры упорядочения граней выпуклого многогранника следует процедура упорядочения отметок всего ПГТО. Процедура упорядочения начинается
выбором нулевой точки. Для этого выбирается одна из точек an an(0) вершин грани G(0), исходя из следующих условий: 1) она не должна совпадать с точками ребра этой грани, общей с гранью G(1) и 2) обход по часовой стрелке всех точек контура грани G(0) должен закончится на точке этого ребра. Последующие точки
берутся в порядке обхода контура грани G(0). При построении проволочной модели условимся последовательность точек контура каждой грани устанавливать в направлении часовой стрелки при взгляде на многогранник со
стороны внешних точек. Затем обходятся точки граней G(1),G(2) и т.д. При этом исключаются ранее пронумерованные точки. Обход заканчивается после нумерации всех точек многогранника X при возврате в нулевую точку. Далее вычисляется
кватернионный код D d(v) 0,s 1 упорядоченного ПГТО: |
|
|
|||
|
a(1) a(0); a(2) |
a(1);...,a(0) |
|
|
|
D d(v) 0,s 1 |
a(s 1) . |
(6) |
|||
|
|
|
|
|
|
Код задает замкнутый пространственный |
контур. |
Элементарные |
векторы |
||
d(v) a( 1) a( ) , 0,1,...,s 1, |
последовательно, без |
разветвлений, |
проходят |
||
через ряд ребер многогранника X и через все его вершины. В таком виде контур ПГТО можно представить отрезком проволоки, начало, и конец которой закреплены
вточке a(0).
Втретьей главе осуществлен синтез алгоритма и структуры распознавания ПГТО по его проволочной модели, при неизвестном угле поворота и оси вращения кватернионного сигнала, задающего этот объект. Синтезирована структура для анализа неупорядоченного ПГТО (рис. 5).
0
КУП 

 ФСП
ФСП
1
Q  КУП
КУП 

 ФСП
ФСП 


M 1
КУП 

 ФСП
ФСП 


Re
Re
Re





 Экстремальноеустройство
Экстремальноеустройство
m
Рис. 5: Структура устройства распознавания кватернионных сигналов с неизвестными углом поворота и оси вращения
На рис. 5 представлены: КУП – корректор угла поворота; ФСП – формирователь скалярного произведения между входным кватернионным сигналом Q и эталонным Р; Re – устройство вычисления реальной части скалярного произведения кватернионных сигналов; экстремальное устройство – устройство определения класса сигнала на входе по оптимальному критерию минимума расстояния (максимума реальной части скалярного произведения).
В результате операции (7) пространственно расположенная точка Аn, задаваемая

12
bрез bрез,0 bрез,1 i bрез,2 j bрез,3 k cos рез rрез sin рез , |
|
bрез |
1 |
(7) |
|
концом вектора p n , |
n 0,1,...,s 1, поворачивается на угол 2 рез |
|
|
|
|
вокруг оси 00 с |
|||||
направляющим вектором rрез и совмещается с точкой Аn,x (рис. 6,а). |
|
|
|
|
|
а) |
|
|
|
|
|
б) |
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 6: Решение задачи определения параметров вращения ПГТО: а) поворот вектора |
|||||||||||||
p n на угол 2 рез |
вокруг оси 00 с направляющим вектором rрез ; б) Соотношения между |
||||||||||||
|
|
|
|
эталонным q, исходным p и преобразованным px векторами |
|
||||||||
Необходимо |
определить |
параметры |
2 рез |
и rрез |
вращения |
исходного |
|||||||
кватернионного сигнала P (рис.7). |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 рез |
r рез |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q q n |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
0, s 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
p n |
|
|
|
|
|
|
|
||||
|
|
|
|
Вращение |
Px px |
n |
|
|
m |
|
|||
|
|
|
0, s 1 |
|
|
|
0, s 1 |
|
|
|
|||
|
|
|
|
|
КТС |
|
|
|
|
|
|
|
|
Рис. 7: К постановке задачи определения параметров вращения кватернионного |
|||||||||||||
|
|
|
|
|
|
|
сигнала |
|
|
|
|
||
Сформируем |
на |
базе эталонного |
вектора q |
собственную систему отсчета |
|||||||||
X Y Z , в которой |
вектор q |
расположен вдоль оси 0Z . |
Плоскости и x |
||||||||||
являются здесь “угломестными”, а плоскость G, в которой расположено основание |
|||||||||||||
конуса – “азимутальной”. Как видно из рис. 6,б, |
вектор px |
может быть получен |
|||||||||||
путем поворота исходного вектора p |
в угломестной плоскости на угол , а |
||||||||||||
затем получившегося вектора |
p на угол в азимутальной плоскости G. Таким |
||||||||||||
образом, углы и являются параметрами преобразования вектора |
p в вектор |
||||||||||||
px в собственной сферической системе отсчета, связанной с эталонным вектором q.
Если определить значения и , то, |
решив задачу сложения двух поворотов, |
|||
можно получить кватернион |
b cos rsin |
поворота вектора p. Компонентами |
||
этого кватерниона являются искомые параметры и r. |
||||
Выражение для нормали r |
получается при вычислении скалярного произведения |
|||
векторов в |
пространстве |
H, на которые натянута плоскость. Векторное |
||
произведение |
p,q двух кватернионов |
p |
и q - есть вектор, одновременно |
|

|
|
|
|
|
|
13 |
|
|
|
|
|
|
|
|
|
перпендикулярный кватернионам |
p и q. Поэтому в соответствии выражением (8) |
||||||||||||||
нормированная |
гиперкомплексная |
часть |
СП |
векторов |
p |
|
и |
q задает нормаль к |
|||||||
плоскости , |
в которой |
расположены |
эти |
векторы: |
r |
|
p,q . |
Аналогично |
|||||||
hyp |
|||||||||||||||
r x |
|
px ,q . |
|
|
|
|
|
|
|
|
|
|
|
|
|
hyp |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
p n q* n |
|
|
|
|
|
|
. |
(8) |
||
|
|
|
p n ,q n |
p n ,q n |
|
p n ,q n |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
E |
|
|
|
|
|
|
|
Также в этой главе приведены структуры реализующие алгоритм упорядочения (рис.8) и распознавания ПГТО (рис.9), заданного в виде его проволочной модели.
Рис.8: Алгоритм структурного анализа неупорядоченного ПГТО
Рис. 9: Алгоритм распознавания ПГТО, представленного в виде его проволочной модели
В четвертой главе представлен алгоритм визуализации трехмерной сцены, представленной в виде ПТП. К ним относятся точечные сцены с обширным количеством точек (103 и более). В данном разделе ставится задача визуализации ПТП и анализ характеристик трехмерного объекта.
Основной операцией для сегментации поверхности точечного объекта является операция кластеризации точек множества. В результате кластеризации это множество разбивается на подмножества точек с одинаковыми или очень близкими свойствами. В качестве общего информативного признака подмножества
|
|
|
14 |
|
|
, |
n 0,1,...,ln 1, элементарной грани Gn выбран вектор нормали к |
An an,m |
|||
|
0,sn 1 |
|
|
ней. Его значения одинаковы для локальных плоскостей, образуемых любыми тремя, не лежащими на одной прямой, точками из этого подмножества (рис. 10).




 Gn
Gn
Рис. 10: Вектор нормали к локальному участку плоскости, задаваемому тремя точками, как информационный признак всей плоскости
В результате сегментации генеральное множество A av 0,s 1представляется совокупностью подмножеств An 0,l 1, относящихся к l элементарным граням
Gn 0,l 1 изображений объектов в сцене I.
Перейдем к рассмотрению процедуры кластеризации точек генерального множества трехмерной сцены I.
Начальный этап кластеризации. На этом этапе из генерального множества A av 0,s 1 выделяется первое подмножество точек, лежащих в одной из граней
визуализируемого многогранного тела. Это подмножество обозначим как
A0 |
|
|
, а соответствующую ему грань – как G0. |
a0,m |
|||
|
|
0,s |
1 |
|
|
0 |
|
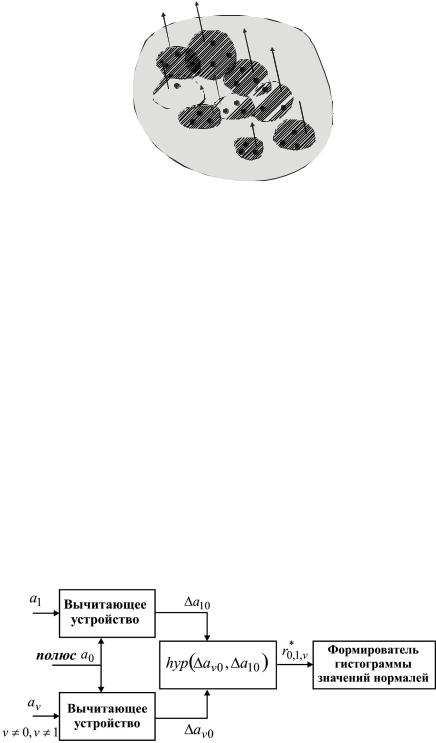
Для построения подмножества A0 выбирается произвольная точка генерального множества и назначается полюсом . Пусть это будут, как показано на рис. 11, точки a1 и a . На выходе такого устройства формируется гистограмма по значениям нормалей rn .
Рис.11: Структура первого цикла преобразования кластеризации точек множества
Одно из значений отсчета гистограммы, сформированной в результате действия структуры рис. 11, может соответствовать количеству N0 элементарных граней в составе грани G0 . Это произойдет, если опорный разностный вектор a10 лежит в плоскости одной из граней анализируемого многогранника. Тогда значение N0 будет самым высоким отсчетом в гистограмме, значительно превосходящим остальные её отсчеты.
15
Промежуточные этапы. На этих этапах кластеризации последовательно из генерального множества выделяются подмножества A1,A2 ,...,Al 1, соответствующие граням G1,G2 ,...,Gl 1. Некоторые точки генерального подмножества находятся на границах этих граней, т.е. одновременно принадлежат двум и более граням. Если пренебречь этим фактором, то при выделении с помощью преобразования кластеризации точек множества грани Gm, точки подмножеств А0 ,A1,...,Am 1 можно исключить из рассмотрения и проверить на соответствие грани Gm только оставшиеся точки генерального множества.
Таким образом, после сегментации сцена I аналитически представляется в виде
I Gn 0,l 1;Gn an,0 ,rn , (9)
где l - число плоских участков (граней).
Выделение краевых точек грани. Один из подходов |
к выполнению данной |
|||
операции |
|
основан на анализе положения текущей |
|
точки подмножества |
|
|
к остальным точкам подмножества. Эта |
операция эффективно |
|
An an,m |
||||
0,sn 1
выполняется путем выделения критических линий к точкам множества An .
Формирование пространственного контура грани. Процесс последовательного формирования критических линий к точкам множества An является сходящимся, т.е. через конечное число шагов в качестве полюса для получения следующей критической линии будет выбрана точка, с которой этот процесс был начат. К этому моменту в результате пересечения всех построенных критических линий получим выпуклый многоугольник Тn , обладающий следующими свойствами: 1) каждое его ребро включает, как минимум, две точки подмножества An , 2) все расположенные на этих ребрах точки подмножества Аn являются внешними точками этого подмножества и 3) остальные точки расположены внутри многоугольника Тn и являются внутренними точками подмножества Аn .
В кватернионном представлении этот контур имеет вид:
Тn tn,m 0,sn 1, tn,m tn,m 1 tn,m , |
(10) |
где sn - число ребер многоугольника. Контур в виде (10) аналитически описывает форму грани Gn , в которой расположены точки подмножества Аn . Этот контур можно интерпретировать в качестве кватернионного сигнала и для его обработки применить методы кватернионного анализа.
Обнаружение граней, смежных с гранью Gn . Краевые точки смежных граней Gn
и Gn 1 , в которых располагаются соответственно точки подмножеств Аn и Аn 1 , чаще всего обладают следующими свойствами: либо краевая точка является общей для многоугольников Тn и Тn 1, либо соответствующие друг другу краевые точки граней Gn и Gn 1 характеризуются минимальным расстоянием между точками подмножества Аn и Аn 1 (рис. 12). На основании этих свойств смежная с Gn грань обнаруживается по критерию “k из n”.

16
Формирование каркаса изображений объектов в трехмерной сцене I, заданной генеральным множеством точек A an 0,sn 1 , выполняется устранением из нее всех
точек этого множества, являющихся внутренними точками сегментированных граней Gn ,n 0,1,...,L 1. Сформированные по краевым точкам контуры ребер в
Gn 1 |
|
Gn |
|
|
|
|
tn 1,1 |
tn,1 |
|
tn 1,2 |
An |
A |
tn 1,3 |
tn,2 |
n 1 |
tn,3 |
|
|
tn 1,4 |
|
|
tn 1,5 |
tn,4 |
|
tn 1,6 |
tn,5 |
|
tn 1,7 |
tn,6 |
|
|
Рис. 12: Соотношения между краевыми точками смежных граней Gn и Gn-1. Пунктирные линии соответствуют истинным границам граней
виде цепного кватернионного кода представляют собой первичное аналитическое описание сцены I. На основании этого описания можно переходить к решению задач распознавания и оценки параметров изображений объектов и устанавливать взаимные отношения между объектами в сцене.
В пятой главе исследована эффективность предложенных алгоритмов распознавания упорядоченного в виде проволочной модели ПГТО. Проанализировано влияние координатного шума на характеристики распознавания. Рассмотрено влияние неровностей поверхности, образованной при кластеризации точек ПТП, на эффективность предложенного алгоритма.
При воздействии координатного шума возникает ряд негативных факторов, таких как распад грани многогранника (рис.13,а), ассоциированного с ПГТО, на одну и более (рис. 14,а), вследствие чего вся проволочная модель (рис. 13,б) теряет начальный вид (рис. 14,б). При этом возникают такие факторы как смещение начальной точки обхода выпуклого многогранника, вследствие чего происходит
|
|
z |
|
|
|
z |
|
|
|
|
|
a4 |
a7 |
|
|
a45 |
|
|
6 |
|
|
a5 |
|
|
4 |
|
|
a7 |
|
|
|
a6 |
|
|
a5 |
|
7 |
|
|
|
|
a0 |
|
|
2 |
a |
|
||
|
|
x |
|
|
a0 |
|
6 |
x |
|
|
|
|
a3 |
|
y |
|
|
|
a31 |
|
y |
|
|
|
|
|
|
||
а) |
a2 |
|
б) |
a13 |
a20 |
|
|
|
|
a1 |
|
|
|
|
Рис. 13: а) исходный вид многогранника, ассоциированного с ПГТО; б) проволочная модель ПГТО

17
|
|
|
z |
|
|
|
z |
|
|
|
|
|
a4 |
|
a7 |
|
a40 |
|
a17 |
|
|
|
a5 |
|
|
3 |
|
||
|
|
|
a6 |
|
|
a5 |
6 |
a62 |
|
|
|
|
a0 |
x |
|
a |
|||
|
|
|
|
|
0 |
x |
|||
|
y |
|
|
|
a3 |
|
y |
|
a37 |
|
|
|
|
|
|
|
|
||
а) |
a1 |
a2 |
|
|
б) |
a14 |
a25 |
|
Рис. 14: а) вид многогранника, ассоциированного с зашумленным ПГТО; б) проволочная модель
перепутывание отметок ПГТО. Соответственно искажается граф связей между вершинами многогранника, ассоциированного с ПГТО.
Для объединения граней предложена и реализована в виде программного модуля следующая методика:
1.Для полученных граней многогранника, ассоциированного с зашумленным ПГТО, вычисляются нормали ri
2.Между полученными нормалями вычисляется расстояние по следующей формуле
R2 |
|
|
|
r |
|
2 |
|
r |
|
2 |
). |
(11) |
|
|
|
|
j |
2Re(r,r |
|||||||
r ,r |
|
|
|
i |
|
|
|
|
i j |
|
|
|
i |
j |
|
|
|
|
|
|
|
|
|
|
|
3. В том случае если расстояние Rri ,rj меньше заданного порогового уровня , то
принимается решение об объединении граней.
В результате проведенного эксперимента для различных порогов объединения были получены характеристики правильного распознавания:
Рправ |
|
|
|
|
1 |
|
|
|
|
0,8 |
|
|
|
|
0,6 |
|
|
|
|
0,4 |
|
|
|
|
0,2 |
|
|
|
|
0 |
0,04 |
0,08 |
0,12 |
0,16 |
Порог = 0  Порог = 0,1 Порог = 0,2
Порог = 0,1 Порог = 0,2 


 Порог = 0,3 Порог = 0,4 Порог = 0,5 Порог = 0,6 Порог = 0,7
Порог = 0,3 Порог = 0,4 Порог = 0,5 Порог = 0,6 Порог = 0,7
СКОшума
Рис. 15: Характеристики вероятности правильного распознавания от СКО шума при различных порогах объединения плоскостей (число экспериментов 1000 опытов на 1 точку графика)
Из характеристик видно, что вероятность правильного распознавания при увеличении порога объединения граней сначала увеличивается (при одних и тех же значениях СКО координатного шума), а затем снова уменьшается. Такой характер графиков обусловлен особенностями формы получаемого многогранника и зависит от расположения нормалей к граням исходного объекта.
В шестой главе приведены практические результаты действия алгоритмов визуализации точечного поля. В качестве исходных данных для анализа рассматривалось зашумленное точечное поле (рис.16).

18
а) б)
Рис.16: Исходное точечное поле: а) поле отметок; б) поверхность сцены
На базе приведенного алгоритма (рис. 17) проводится низкочастотная фильтрация точечного поля (рис. 18,а) и, на основе полученных результатов, формируется векторное поле нормалей (рис. 18,б).
Рис. 17: Структура алгоритма визуализации точечного поля
а) |
б) |
Рис.18: Результат работы алгоритма: а) сцена после НЧ фильтрации, б) векторное поле нормалей
Для реализации алгоритмов НЧ фильтрации и формирования векторного поля разработаны следующие структуры:

19
Рис.19: Структура реализации алгоритма НЧ фильтрации
Рис.20: Структура реализации алгоритма формирования векторного поля
Результатом действия алгоритма кластеризации является выделение плоских участков поверхности (рис. 21)
Рис.21: Результат действия алгоритма кластеризации
Показана работоспособность алгоритма для визуализации трехмерных геометрических объектов, например для пирамиды (рис. 22) и куба (рис. 23).
а) |
б) |
Рис.22: Результат работы алгоритма: а) исходное точечное поле (пирамида), б) результат визуализации

20
а) |
б) |
Рис.23: Результат работы алгоритма: а) исходное точечное поле (куб), б) результат визуализации
ОСНОВНЫЕ РЕЗУЛЬТАТЫ
1.Разработан новый устойчивый алгоритм упорядочения отметок ПГТО по его проволочной модели. Проволочная модель однозначно нумерует отметки ПГТО и представляет собой его аналитическое описание в виде последовательности кватернионов.
2.Синтезирован алгоритм распознавания ПГТО по результатам согласованной фильтрации кватернионного сигнала, задающего проволочную модель объекта. Исследована помехоустойчивость алгоритма распознавания 3D изображений при воздействии координатных шумов для алфавита из четырех близких по форме классов. Достаточно хорошие результаты правильного распознавания с вероятностью не ниже 0,95 достигаются при оптимальном пороге объединения граней и отношении сигнал/шум не менее 700. Исследована также зависимость вероятностей правильного распознавания ПГТО от величины порога объединения элементарных граней в одну грань. Выявлено наличие максимума вероятности правильного распознавания при изменении величины данного порога. Для рассмотренного случая соотношение вероятности правильного распознавания при оптимальном пороге и неоптимальном изменяется от 0,95 до 0,3.
3.Решена задача определения параметров вращения изображения ПГТО по результатам его фильтрации. Исследован кватернионный фильтр, вырабатывающий меру схожести фильтруемого ПГТО с неизвестными параметрами поворота, с эталонным сигналом заданного класса. Определены параметры вращения каждого из векторов фильтруемого сигнала, а также единых для всего фильтруемого сигнала значений угла поворота и оси вращения.
4.Выполнена программная реализация алгоритма низкочастотной фильтрации трехмерного точечного поля, а также алгоритмов формирования векторного поля и визуализации точечного поля. Время работы программы при обработке трехмерного изображения объекта (количество точек от 300 до 600), заданного в виде ПТП, на PC
спроцессором Intel Celeron 2,8 ГГц и ОЗУ 504 МБ при использовании неоптимизированной версии программы составляет 7-10 сек.