17. Гармонические колебания. Идеальный гармонический осциллятор. Уравнение идеального осциллятора на примере колебаний пружинного маятника и его решение. Гармонические колебания
![]()
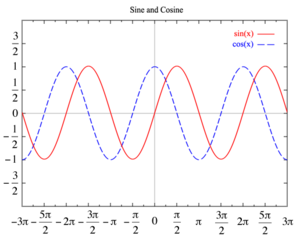
Графики функций f(x) = sin(x) и g(x) = cos(x) на декартовой плоскости.
Гармоническое колебание — явление периодического изменения какой-либо величины, при котором зависимость от аргумента имеет характер функции синуса или косинуса. Например, гармонически колеблется величина, изменяющаяся во времени следующим образом:
![]()
или
![]() ,
,
где
х — значение изменяющейся
величины, t — время, остальные
параметры — постоянные: А —
амплитуда колебаний, ω — циклическая
частота колебаний,
![]() —
полная фаза колебаний,
—
полная фаза колебаний,
![]() —
начальная фаза колебаний.
—
начальная фаза колебаний.
Обобщенное гармоническое колебание в дифференциальном виде
![]()
(Любое
нетривиальное[1]
решение этого дифференциального
уравнения — есть гармоническое
колебание с циклической частотой
![]() )
)
Виды колебаний Эволюция во времени перемещения, скорости и ускорения при гармоническом движении
Свободные колебания совершаются под действием внутренних сил системы после того, как система была выведена из положения равновесия. Чтобы свободные колебания были гармоническими, необходимо, чтобы колебательная система была линейной (описывалась линейными уравнениями движения), и в ней отсутствовала диссипация энергии (последняя вызвала бы затухание).
Вынужденные колебания совершаются под воздействием внешней периодической силы. Чтобы они были гармоническими, достаточно чтобы колебательная система была линейной (описывалась линейными уравнениями движения), а внешняя сила сама менялась со временем как гармоническое колебание (то есть чтобы зависимость от времени этой силы была синусоидальной).
Применение
Гармонические колебания выделяются из всех остальных видов колебаний по следующим причинам:
Очень часто[2] малые колебания, как свободные, так и вынужденные, которые происходят в реальных системах, можно считать имеющими форму гармонических колебаний или очень близкую к ней.
Широкий класс периодических функций может быть разложен на сумму тригонометрических компонентов. Другими словами, любое колебание может быть представлено как сумма гармонических колебаний.
Для широкого класса систем откликом на гармоническое воздействие является гармоническое колебание (свойство линейности), при этом связь воздействия и отклика является устойчивой характеристикой системы. С учётом предыдущего свойства это позволяет исследовать прохождение колебаний произвольной формы через системы.
Линейный гармонический осциллятор — система, совершающая одномерное движение под действием квазиупругой силы, — является моделью, используемой во многих задачах классической и квантовой теории. Пружинный, физический и математический маятники — примеры классических гармонических осцилляторов. Потенциальная энергия гармонического осциллятора (см. (141.5)) равна
Гармонический осциллятор
Как известно, гармоническим осциллятором называется система, способная совершать гармонические колебания. В физике модель гармонического осциллятора играет важную роль, особенно при исследовании малых колебаний систем около положения устойчивого равновесия. Примером таких колебаний в квантовой механике являются колебания атомов в твердых телах, молекулах и т.д.
Рассмотрим
одномерный гармонический осциллятор,
совершающий колебания вдоль оси
![]() под
действием возвращающей квазиупругой
силы
под
действием возвращающей квазиупругой
силы
![]() .
Потенциальная энергия такого осциллятора
имеет вид
.
Потенциальная энергия такого осциллятора
имеет вид
|
(4.77) |
где
![]() -
собственная частота классического
гармонического осциллятора. Таким
образом, квантово-механическая задача
о гармоническом осцилляторе сводится
к задаче о движении частицы в параболической
потенциальной яме (4.77) .
-
собственная частота классического
гармонического осциллятора. Таким
образом, квантово-механическая задача
о гармоническом осцилляторе сводится
к задаче о движении частицы в параболической
потенциальной яме (4.77) .
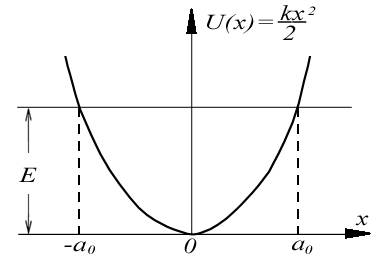
Рассмотрим
сначала поведение классического
гармонического осциллятора. Пусть
частица с полной энергией
![]() совершает
колебания в силовом поле (4.77) (рис.4.24).
Точки
совершает
колебания в силовом поле (4.77) (рис.4.24).
Точки
![]() и
и
![]() ,
в которых полная энергия частицы равна
потенциальной энергии
,
в которых полная энергия частицы равна
потенциальной энергии
![]() ,
являются для частицы точками поворота.
Частица совершает колебательные движения
между стенками потенциальной ямы внутри
отрезка
,
являются для частицы точками поворота.
Частица совершает колебательные движения
между стенками потенциальной ямы внутри
отрезка
![]() ,
выйти за пределы которого она не может.
Амплитуда колебаний
,
выйти за пределы которого она не может.
Амплитуда колебаний
![]() определяется
выражением
определяется
выражением
 .
.
|
Рис. 4.24. |
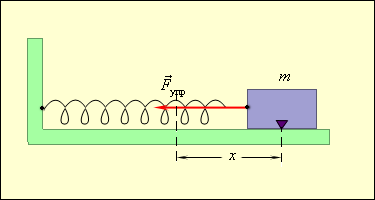
Пружинный маятник — механическая система, состоящая из пружины с коэффициентом упругости (жёсткостью) k (закон Гука), один конец которой жёстко закреплён, а на втором находится груз массы m
F(t) = ma(t) = –mω2x(t). |
В этом соотношении ω – круговая частота гармонических колебаний. Таким свойством обладает упругая сила в пределах применимости закона Гука (см. §1.12):
Fупр = –kx. |
Силы любой другой физической природы, удовлетворяющие этому условию, называются квазиупругими. Таким образом, груз некоторой массы m, прикрепленный к пружине жесткости k, второй конец которой закреплен неподвижно (рис. 2.2.1), составляют систему, способную совершать в отсутствие трения свободные гармонические колебания. Груз на пружине называют линейным гармоническим осциллятором.
|
Рисунок 2.2.1. Колебания груза на пружине. Трения нет. |
 1
1Круговая частота ω0 свободных колебаний груза на пружине находится из второго закона Ньютона:
|
откуда
|

Частота ω0 называется собственной частотой колебательной системы. Период T гармонических колебаний груза на пружине равен
|
При горизонтальном расположении системы пружина–груз сила тяжести, приложенная к грузу, компенсируется силой реакции опоры. Если же груз подвешен на пружине, то сила тяжести направлена по линии движения груза. В положении равновесия пружина растянута на величину x0, равную
|

и колебания совершаются около этого нового положения равновесия. Приведенные выше выражения для собственной частоты ω0 и периода колебаний T справедливы и в этом случае. Строгое описание поведения колебательной системы может быть дано, если принять во внимание математическую связь между ускорением тела a и координатой x: ускорение является второй производной координаты тела x по времени t:
|
Поэтому второй закон Ньютона для груза на пружине может быть записан в виде
|
или
|
|
(*) |
где
![]() Все физические системы (не только
механические), описываемые уравнением
(*), способны совершать свободные
гармонические колебания, так как решением
этого уравнения являются гармонические
функции вида
Все физические системы (не только
механические), описываемые уравнением
(*), способны совершать свободные
гармонические колебания, так как решением
этого уравнения являются гармонические
функции вида
|
Уравнение (*) называется уравнением свободных колебаний. Следует обратить внимание на то, что физические свойства колебательной системы определяют только собственную частоту колебаний ω0 или период T. Такие параметры процесса колебаний, как амплитуда xm и начальная фаза φ0, определяются способом, с помощью которого система была выведена из состояния равновесия в начальный момент времени. Если, например, груз был смещен из положения равновесия на расстояние Δl и затем в момент времени t = 0 отпущен без начальной скорости, то xm = Δl, φ0 = 0. Если же грузу, находившемуся в положении равновесия, с помощью резкого толчка была сообщена начальная скорость ±υ0, то
|