

Одномассовая механическая модель силового канала эп.
Е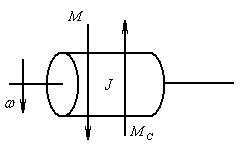 сли
считать, что жесткость механической
связи между 2-мя вращающимися массами
равна бесконечности, то можно считать
2-х массовую механическую модель
адекватной 1-о массовой.
сли
считать, что жесткость механической
связи между 2-мя вращающимися массами
равна бесконечности, то можно считать
2-х массовую механическую модель
адекватной 1-о массовой.
Тогда :
![]()

Рис.11.
Тогда система уравнений описывающая 2-х массовую механическую модель сведётся к одному уравнению:
![]() (11)
(11)
В этом уравнении
левая часть может быть графически
представлена в виде 2-х функций
![]() и
и
![]() ,
при этом если строго следовать физическому
смыслу этих функций, то
-
(статически-механическая характеристика
ЭМП) будет располагаться в 1-м квадранте
координатной плоскости, а функция
,
которая называется статическая-механическая
характеристика механизма будет
располагаться во 2-м квадранте.
,
при этом если строго следовать физическому
смыслу этих функций, то
-
(статически-механическая характеристика
ЭМП) будет располагаться в 1-м квадранте
координатной плоскости, а функция
,
которая называется статическая-механическая
характеристика механизма будет
располагаться во 2-м квадранте.
В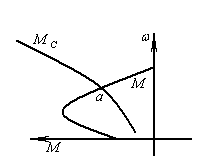 этом случае нахождение точки статического
равновесия, а именно равенства
этом случае нахождение точки статического
равновесия, а именно равенства
![]() окажется
невозможным. Поэтому обе характеристики
для удобства анализа располагает в
одном квадранте, чаще во 2-м. Тогда
уравнение (11) будет иметь вид арифметического
уравнения.
окажется
невозможным. Поэтому обе характеристики
для удобства анализа располагает в
одном квадранте, чаще во 2-м. Тогда
уравнение (11) будет иметь вид арифметического
уравнения.
При анализе механической части с помощью этого уравнения возникает проблема связанная с недостатком каталожных данных о суммарном моменте инерции вращающихся частей , поэтому зачастую используют уравнение (11) записываемые в так называемых инженерных координатах.
Рис.12.
В этом уравнении:
![]() момент
инерции выражается через произведение
массы на квадрант приведенного радиуса
инерции, которое достаточно легко
определиться при наличии данных о
габаритах и массе вращающихся частей,
тогда уравнение примет вид:
момент
инерции выражается через произведение
массы на квадрант приведенного радиуса
инерции, которое достаточно легко
определиться при наличии данных о
габаритах и массе вращающихся частей,
тогда уравнение примет вид:
![]() (12)
(12)
Если представить:
![]() , где
-
приведенный диаметр инерции, а массу
представить через силой тяжести и
ускорение свободного падения
, где
-
приведенный диаметр инерции, а массу
представить через силой тяжести и
ускорение свободного падения
![]() ,
то уравнение примет вид:
,
то уравнение примет вид:
![]() (13)
(13)
Уравнения записываемые
в виде
![]() являются математическим описанием 1-о
массовой механической моделью и
называе6тся соответственно:
являются математическим описанием 1-о
массовой механической моделью и
называе6тся соответственно:
(11) – уравнение движения в классических координатах (классическое, основное).
(13) – уравнение движения в инженерных координатах.
В уравнении (13)
![]() принято называть маховый
момент.
принято называть маховый
момент.
Одномассовая механическая модель как объект управления (аналоговый вариант).
Динамическая модель одномассовой механической системы в переменных «входы-выходы».
Поставим перед собой задачу представление одномассовой механической системы в виде динамической модели в переменных «входы-выходы», имея в виду , что система имеет следующие математические описание.
, записав в операторной форме.
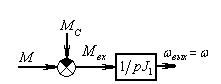
Рис.13.
Электромеханические преобразователи.
Уравнения описывающие электромеханические преобразователи.
Механические характеристики электромеханических преобразователей в различных режимах их работы.
Электромеханические преобразователи как объект управления.
Энергетические соотношения в электромеханических преобразованиях.
Под термином «электромеханический преобразователь» в дальнейшем будем подразумевать ДППсНВ, АД,СД,ДПП последовательного возбуждения..
ДПТсНВ. Основные уравнения.
Механические характеристики.
К основным уравнениям,
описывающих работу ДПТсНВ на основании
которых можно получить уравнения
механических характеристик в различных
режимах относится:
![]()
где
![]() -
вращающий электромагнитный момент
двигателя и ток в силовой цепи ЭД (цепь
якоря).
-
вращающий электромагнитный момент
двигателя и ток в силовой цепи ЭД (цепь
якоря).
![]() -
эдс наведенная в якорной цепи
-
эдс наведенная в якорной цепи
- угловая скорость вращения якоря.
При этом необходимо помнить, что в существующих электрических машинах моментообразующими являются ток в силовой цепи и основной магнитный поток.
![]()
![]() (14)
(14)
Уравнение (1) подчиняется правилу левой руки.
- конструктивная постоянная ЭД.
![]() -
основной магнитный поток, созданный
обмоткой возбуждения.
-
основной магнитный поток, созданный
обмоткой возбуждения.
- ток якоря, который зависит от механической нагрузки навалу двигателя.
Для ДПТ как модуль так и направление векторов является очевидными.
Направление вектора определяется геометрическим расположением щеток, направление вектора геометрически расположенным главных магнитных полюсов машины.
![]() (15)
(15)
У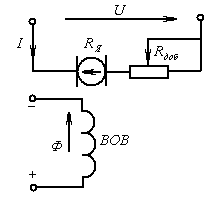 равнение
(15) подчиняется правилу правой руки.
равнение
(15) подчиняется правилу правой руки.
![]() (16)
(16)
- напряжение приложенное к зажимам якорной цепи.
![]()
![]() -
сопротивление цепи якоря.
-
сопротивление цепи якоря.
![]() -
сопротивление обмотки якоря
-
сопротивление обмотки якоря
Рис.14.
В этом уравнении:
![]()
![]()
![]() -
перепад скоростей.
-
перепад скоростей.
![]()
где
![]() -
угловая скорость идеализированного
холостого хода
-
угловая скорость идеализированного
холостого хода
![]() -
перепад скоростей
-
перепад скоростей
Нетрудно убедиться,
что если
выразить
через
![]() ,
то:
,
то:
![]()
![]() (17)
(17)
![]() (18)
(18)
(17) – уравнение электромеханической или скоростной характеристики.
(18) – уравнение механической характеристики.