

1.Электромашинный пч
а. СЭМПЧ (синхронный электрошинный ПЧ), основным элементом, которого является синхронный 3-х фазный генератор.
б. АЭМПЧ (асинхронный электрошинный ПЧ), основным элементом которого является асинхронный 3-х фазный генератор.
2. статические преобразования частоты СПЧ (вентильные) элементная база которых включает в себя использование силовых ключей (тиристоров или транзисторов). Рассмотрим структур статического2-х звенного СПЧ
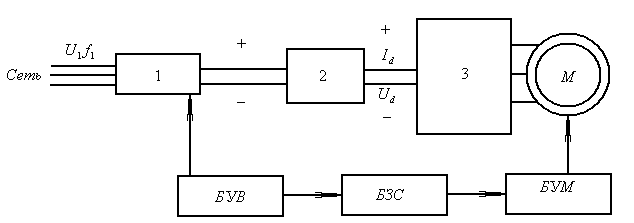
Рис.118
1. – управляемый или неуправляемый выпрямитель предназначен для преобразования 3-х фазного переменного напряжения с частотой и напряжением сети в постоянное с изменяющимся или не изменяющимся действующим значением.
2. – фильтр,
предназначен для сглаживания пульсации
напряжения или тока с выхода выпрямителя
![]() и
и
![]() .
.
3.- инвертор, предназначен для преобразования постоянного сглаженного напряжения в переменное 3-х фазное с изменяющимся частотой и напряжением.
В том случае если блок 1 управляемый, то инвертор изменяет только частоту, в случае если 1 –неуправляемый, инвертор изменит и частоту, и амплитуду напряжения.
БУВ – блок управления выпрямителем.
БУН – блок управления инвертором
БЗС – блок задания скорости
В настоящее время использование выпрямительных схем на входе ЭП строго регламентируется. В этом плане значительно предпочтительней является схема, в которой в качестве блока 1 используется неуправляемый выпрямитель.
В этом случае инвертор, который должен регулировать как частоту, так и напряжением управляется либо по принципу ШИР, либо по принципу ШИМ. С точки зрения влияния на питающую сеть они равноценны, однако с точки зрения влияния на двигатель предположительно инверторы с ШИМ (широтно- импульсная модуляция), т.к. они позволяют воздействовать кроме напряжения и частоты, на форму выходного напряжения, которая, в идеале является синусоидальной.
Механические характеристики при частотном регулировании имеет следующий вид:
- естественная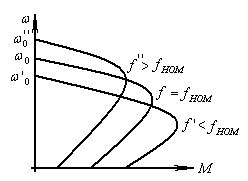
Рис.119
Показатели качества:
направления двузонное и вверх и вниз от основной частоты
плавность - высокая
стабильность - высокая, т.к. наклон регулировочных характеристик, по отношению к естественной, практически не изменяются
допустимая нагрузка, целесообразна чаще регулировать при постоянном моменте
энергетическая эффективность зависит от структуры преобразователя, а также технических средств, с помощью которых он реализован.
 (практически
не ограничен).
(практически
не ограничен).
Т.О. к основным достоинствам частотного регулирования АД Можно отнести:
1. высокие показатели качества
2. минимальная установленная мощность системы по сравнению с другими видами регулирования (не превышает 200% )
как следствие наилучшие массогабаритные показатели
возможность применения в любых производствах
высокая степень автоматизации.
К общепринятым недостаткам частотного регулирования можно отнести:
большое потребление реактивной мощности, низкий и как следствие «загрязнение» питающей сети.
прямоугольность формы выходного напряжения и тока, т.е. наличие высоких гармоник и, как следствие, большие потери в двигателе.
В известной степени
избавиться от 1-го недостатка является
применение частотных преобразований
с широтно- амплитудным регулированием
(ШИР). В этом случае в структуре
преобразователя в качестве входного
элемента используют не управляемый
выпрямитель не
![]() ,
а инвертор выполняет функции изменения
выходного напряжения и по частоте и по
амплитуде.
,
а инвертор выполняет функции изменения
выходного напряжения и по частоте и по
амплитуде.
Различают 3 вида ШИР:
1. ШИР на выходе инвертора, представляющий из себя высокочастотный силовой ключ установленный перед инвертором.
2. ШИР на выходе инвертора, установленный на зажимах двигателя.
3. ШИР в самом
инверторе. В этом случае часть силовых
ключей входящих в инвертор работает в
продолжительном режиме с периодами
коммутации
![]() ,
связанных с выходной частотной
,
связанных с выходной частотной
![]() ,
а другая часть силовых ключей входящих
в состав инвертора работает в импульсном
режиме, то выходное напряжение будет
складываться из высокочастотной
последовательности импульсов одинаковой
ширины и амплитуды и при этом если
длительность (ширину) импульса обозначать
,
а промежуток между 2-мя соседними
импульсами
,
то:
,
а другая часть силовых ключей входящих
в состав инвертора работает в импульсном
режиме, то выходное напряжение будет
складываться из высокочастотной
последовательности импульсов одинаковой
ширины и амплитуды и при этом если
длительность (ширину) импульса обозначать
,
а промежуток между 2-мя соседними
импульсами
,
то:
то при этом
![]() .
.
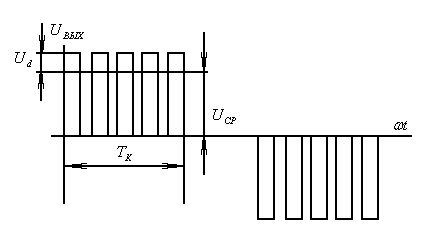
Рис.120
Однако при этом форма тока и напряжения продолжается оставаться существенно не синусоидальной и, кроме того, в рассмотренной системе в качестве ШИР используют силовые ключи, мощность которых должна быть согласованна с мощностью самого двигателя, поэтому такие преобразователи применяют только в частотных ЭП малой и средней мощности.
Избавиться одновременно от 2-х указанных недостатков позволяет применение ЧП. с ШИМ. В таких преобразователях используются инверторы позволяющие регулировать выходное напряжение и по частоте и по амплитуде, а так же придавать ему необходимую форму.
Принцип ШИМ рассмотрим с помощью электрической схемой замещения.
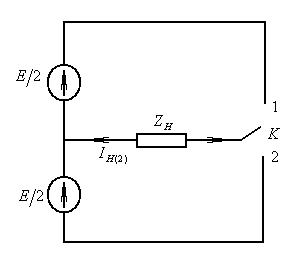
Рис.121
На схеме замещения
сглаженное напряжение на выходе фильтра
![]() поочерёдно
с помощью высокочастотного силового
ключа
подключается к сопротивлению нагрузки
(
поочерёдно
с помощью высокочастотного силового
ключа
подключается к сопротивлению нагрузки
(![]() -
одна фаза статорной обмотки).
-
одна фаза статорной обмотки).
Если ключ
замкнуть
в положение 1, то работает верхняя
половина источника питания. Если
замкнуть в положении 2, то работает
нижняя половина источника питания. Ток
![]() направлен противоположно
направлен противоположно
![]() .
Если обозначить
-
длительность замкнутого ключа в положении
1, а длительность замкнутого ключа в
положении 2, обозначим
,
то если
=
,
.
Если обозначить
-
длительность замкнутого ключа в положении
1, а длительность замкнутого ключа в
положении 2, обозначим
,
то если
=
,
![]() .Если
соотношение между
и
,
представленное в виде:
.Если
соотношение между
и
,
представленное в виде:
![]() изменяется по
закону синуса, то :
изменяется по
закону синуса, то :
![]()
где
![]() -
называется несущая
глубина модуляции,
а
-
называется несущая
глубина модуляции,
а
![]() ,
- несущий
период.,
модуляции,
,
- несущий
период.,
модуляции,
![]() -
несущая глубина модуляции .
-
несущая глубина модуляции .
Т.о, изменяя глубину модуляции можно воздействовать на амплитуду выходного напряжения , изменяя несущую частоту модуляции на выходную частоту. При этом выходное напряжение будет складываться из высокочастотной последовательности импульсов одинаковых по амплитуде , но различных в зависимости от формы выходного напряжения, по ширине импульсов.
В настоящее время частотные преобразователи с ШИМ находят широкое применение при частотном регулировании. При этом энергетические показатели таких приводов следующие:
![]()
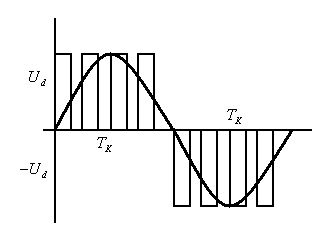
Рис.121