

Построение механических характеристик с использованием формулы Клосса.
Выражение зависимости вращающегося электромагнитного момента от скольжения - формула Клосса.
получают путем
деления![]() .
.
После проведения несложных алгебраических операций получим выражение:
 (33)
(33)
![]() -
перегрузочная способность двигателя.
-
перегрузочная способность двигателя.
Если в (28) вместо
подставить
![]() получим:
получим:
 (34)
(34)
Решим (34) относительно
критического скольжения (![]() ):
):
![]() (35)
(35)
Используя эти
выражения, а также зная паспортные
данные двигателя по каталогу легко
построить механические характеристики
![]() .
.
Последовательность промежуточных расчетов приведена в курсе «ЭП». Построение характеристик сводиться к использованию уравнений (33) и (29):
![]() (29)
(29)
![]()
В интервале от 0до
выбираем
шаг не более 0,01,т.е.
![]() .
.
В интервале от
до
1 шаг
![]() .
.
Получим характеристики аналогичные построенные ране.
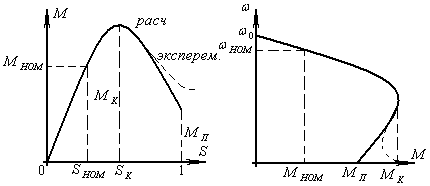
Рис.46 Рис.47
Эти характеристики, отличаются от экспериментальных механических характеристик тем, что реальный пусковой несколько больше, чем расчётный при .
Реальные механические
характеристики имеют некоторый провал
в области скольжения
.
Это связанно с тем, что в расчётных
характеристиках построенных с помощью
формулы Клосса не учитываются
конструктивные особенности двигателя,
направленные на улучшение их пусковых
свойств (двигатель с глубоким пазом или
с роторной обмоткой типа беличьего
колеса). Части характеристик, описывающих
усто1чивую работу (рабочие части
характеристик ) при
![]() практически
точно совпадают.
практически
точно совпадают.
Построение искусственных механических характеристик с использованием формулы Клосса несколько затруднительно в связи с тем, что для этого требуется:
а)
![]()
б)
![]()
в)
![]()
Достаточно точно эта зависимость может быть определена только для случая (а).

Пуск ад.
АДС КЗ ротором является наиболее простым, дешевым и одним из самых надёжных типов ЭД, следовательно в промышленном ЭП находят наиболее широкое применение. В начальный момент обеспечивает достаточно большое значение момента. Для ЭП малой мощности к тому же не обладают большими пусковыми токами, следовательно в ЭП с КЗ АД малой мощности используют прямой пуск.
В ЭП средней и
большой мощности задача пуска несколько
сложнее. Это связан6о с тем, что
![]() (36)
(36)
где
![]() -
конструктивная электромагнитная
постоянная двигателя, которая зависит
от числа пар полюсов двигателя и способов
наматывания статорной и роторной
обмотки.
-
конструктивная электромагнитная
постоянная двигателя, которая зависит
от числа пар полюсов двигателя и способов
наматывания статорной и роторной
обмотки.
- основной магнитный поток.
При этом в уравнении (36) не учитывается влияние на магнитный поток скорости и угла поворота ротора.
![]() -
ток в роторе
-
ток в роторе
![]() -
угол сдвига фаз между ЭДС и тока ротора.
-
угол сдвига фаз между ЭДС и тока ротора.
У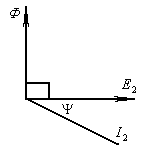 равнение
(36) можно проиллюстрировать следующей
векторной диаграммой.
равнение
(36) можно проиллюстрировать следующей
векторной диаграммой.
Сдвиг фаз между
и
определяет
активным и индуктивным сопротивлением
обмотки ротора. При этом известно, что
это соотношение изменяется при изменении
скорости вращения ротора. И в частности
при неподвижном роторе фазовый сдвиг
между
![]() и
будет
наибольшим (предельным для двигательного
режима) скольжение
и
будет
наибольшим (предельным для двигательного
режима) скольжение
![]() .
.
В
Рис. 48![]() будет
наибольшей. Будет иметь место эффект
вытеснения
,
следовательно уменьшает эффективное
сечение проводника увеличится индуктивное
сопротивление, следовательно
будет
наибольшей. Будет иметь место эффект
вытеснения
,
следовательно уменьшает эффективное
сечение проводника увеличится индуктивное
сопротивление, следовательно
![]() ,
что приведёт к понижению пускового
момента. Кроме того, при неподвижном
роторе относится скорость пересечения
силовыми линиями магнитного поля витков
ротора также будет наибольшим:
,
что приведёт к понижению пускового
момента. Кроме того, при неподвижном
роторе относится скорость пересечения
силовыми линиями магнитного поля витков
ротора также будет наибольшим:
![]() -
скорость изменения магнитного потока.
-
скорость изменения магнитного потока.
![]() -
наибольшая ЭДС в обмотке ротора.
-
наибольшая ЭДС в обмотке ротора.
Величина тока
пускового
![]() может
привести к перегреву двигателя.
может
привести к перегреву двигателя.
При запуске АД в ЭП средней и большой мощности основными задачами являются:
1. ограничение пускового (снижение броска ).
2. увеличение пускового .
Если внимательно
изучить уравнение (32), но нетрудно
убедиться, что 1-ая задача может быть
решена введением
![]() активного
в цепь ротора, что позволяет:
активного
в цепь ротора, что позволяет:
1. снизить
![]() .
.
2. увеличить
составляющую
![]() .
.
Э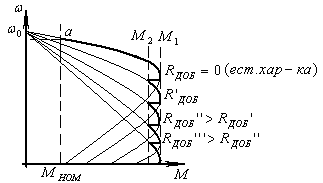 тот
способ может быть применим только для
двигателя с фазным ротором. При этом
пусковые характеристики представляет
из себя семейство реостатных, где число
ступеней чаще всего известно заранее.
тот
способ может быть применим только для
двигателя с фазным ротором. При этом
пусковые характеристики представляет
из себя семейство реостатных, где число
ступеней чаще всего известно заранее.
Рис.49