

51. Применение программируемого таймера в системах управления эп.
П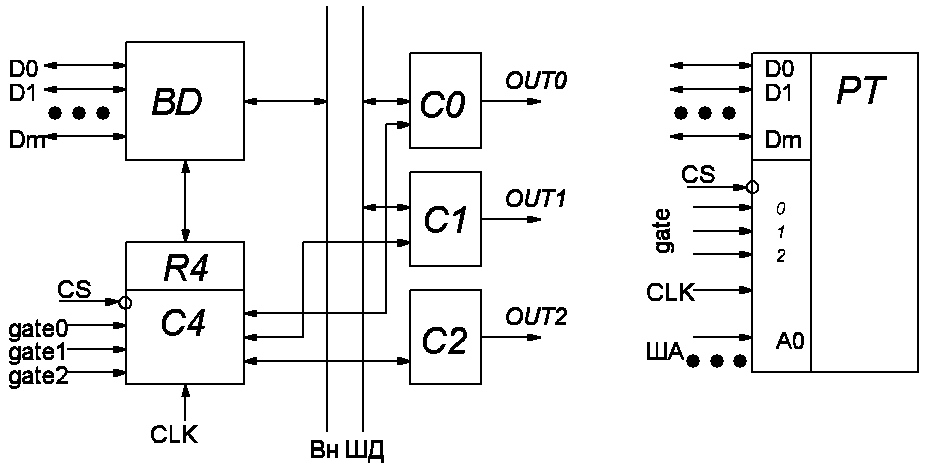 рограммируемый
таймер предназначен для отсчета
интервалов времени и для времязадающих
функций (формирование последовательности
импульсов, импульсов модуляции, управл.
устройствами в функции времени). Функц.
схема:
рограммируемый
таймер предназначен для отсчета
интервалов времени и для времязадающих
функций (формирование последовательности
импульсов, импульсов модуляции, управл.
устройствами в функции времени). Функц.
схема:
Каждый канал таймера содержит 16-разр. счетчик. Перед использованием записывается в счетчик пропорциональное интервалу времени значение. Когда поступает на вход сигнал GATE (разрешение счета) счетчик декрементируется с каждым тактовым импульсом. Когда содержимое становится = 0 – на выходе формируется импульс. Существует 2 режима: режим таймера и режим счетчика. В режиме таймера формируется временной интервал. В режиме счетчика организовывается счет количества внешних импульсов, которые поступают на специальный внешний вход. В режиме счетчика можно определять длительность интервалов времени. При задании режима можно задать направление счета. Чтобы запрограммировать таймер он должен быть подключен к ЦПУ. После этого он может работать вместе с ЦПУ или как самостоятельное устройство. Чтобы он начал работать необходимо на вход «разрешение счета» подать импульс. Работу таймера можно показать на сл. диаграммах (в счетчике записано значение 7 и назначен режим таймера - декрементация):
Обычно таймер входит в состав микроконтроллера (2 и более).
52. Применение программируемого таймера в системах управления эп.
П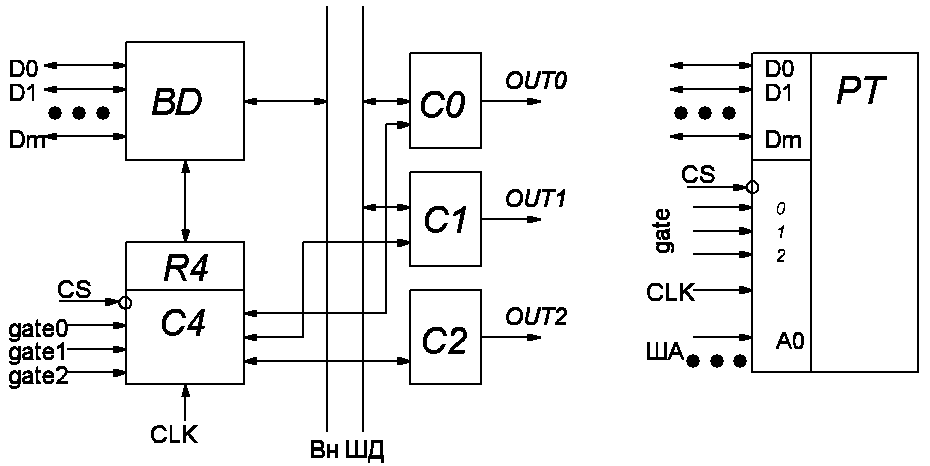 рограммируемый
таймер предназначен для отсчета
интервалов времени и для времязадающих
функций (формирование последовательности
импульсов, импульсов модуляции, управл.
устройствами в функции времени). Функц.
схема:
рограммируемый
таймер предназначен для отсчета
интервалов времени и для времязадающих
функций (формирование последовательности
импульсов, импульсов модуляции, управл.
устройствами в функции времени). Функц.
схема:
К аждый канал таймера содержит 16-разр. счетчик. Перед использованием записывается в счетчик пропорциональное интервалу времени значение. Когда поступает на вход сигнал GATE (разрешение счета) счетчик декрементируется с каждым тактовым импульсом. Когда содержимое становится = 0 – на выходе формируется импульс. Существует 2 режима: режим таймера и режим счетчика. В режиме таймера формируется временной интервал. В режиме счетчика организовывается счет количества внешних импульсов, которые поступают на специальный внешний вход. В режиме счетчика можно определять длительность интервалов времени. При задании режима можно задать направление счета. Чтобы запрограммировать таймер он должен быть подключен к ЦПУ. После этого он может работать вместе с ЦПУ или как самостоятельное устройство. Чтобы он начал работать необходимо на вход «разрешение счета» подать импульс. Работу таймера можно показать на сл. диаграммах (в счетчике записано значение 7 и назначен режим таймера - декрементация):
Обычно таймер входит в состав микроконтроллера (2 и более).
53. Использование нечеткой логики для синтеза управления. Лингвист. Переменные.
Нечеткое
множество – совокупность элементов,
для каждого из которых задана степень
принадлежности к этому множеству. А:
 ,
где x
– элемент,
,
где x
– элемент,
 - степень принадлежности.
- степень принадлежности.
 .
Для классических элементов:
.
Для классических элементов: .
.
Для нечеткого множества границы а и b размыты, как показано на рисунке:
Ф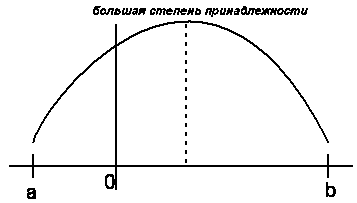 ункцию
принадлежности строят с помощью
экспертных оценок или на основании
содерж. анализа того или иного множества.
ункцию
принадлежности строят с помощью
экспертных оценок или на основании
содерж. анализа того или иного множества.
Логические операции для нечетких множеств:
А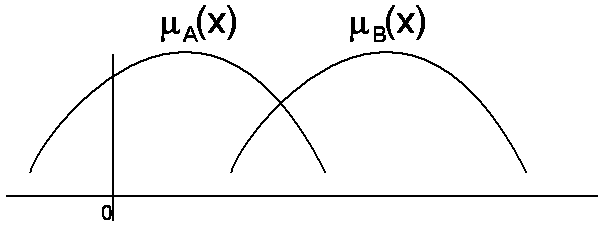 :
,
В:
:
,
В:
 .
.
О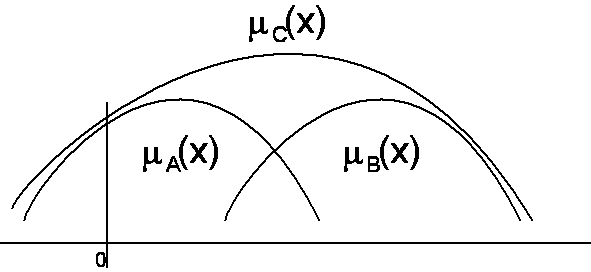 перация
ИЛИ
перация
ИЛИ
 :
:

Операция И:

А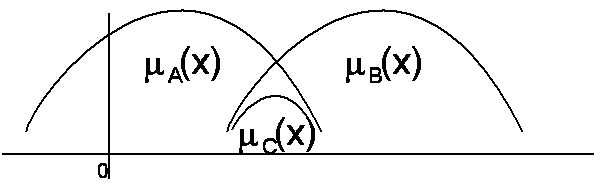 рифметические
операции:
рифметические
операции:
С=А+В => 
С=А*В => 
Л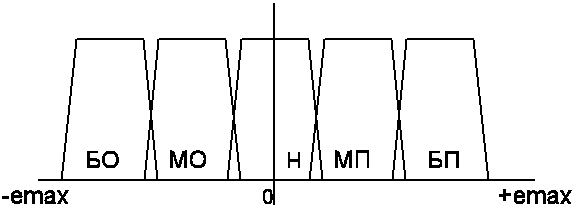 ингвистические
переменные дают большую погрешность.
Применение их позволяет заменить мат.
расчеты логическим выводом. Логические
действия легко алгоритмизируются и не
требуют большого количества разрядов.
Если заменить действующие числа
лингвистическими переменными , то для
формирования управляющего сигнала
возможно применение логических правил
вывода. БП – большое положительное, МП
– малое положительное, Н – нулевое, МО
– малое отрицательное, БО – большое
отрицательное. Когда введены
лингвистические переменные, тогда
каждое из них представляет собой
нечеткое множество.
ингвистические
переменные дают большую погрешность.
Применение их позволяет заменить мат.
расчеты логическим выводом. Логические
действия легко алгоритмизируются и не
требуют большого количества разрядов.
Если заменить действующие числа
лингвистическими переменными , то для
формирования управляющего сигнала
возможно применение логических правил
вывода. БП – большое положительное, МП
– малое положительное, Н – нулевое, МО
– малое отрицательное, БО – большое
отрицательное. Когда введены
лингвистические переменные, тогда
каждое из них представляет собой
нечеткое множество.