

35. Гарвардская архитектура восьмиразрядных микроконтроллеров pic.
А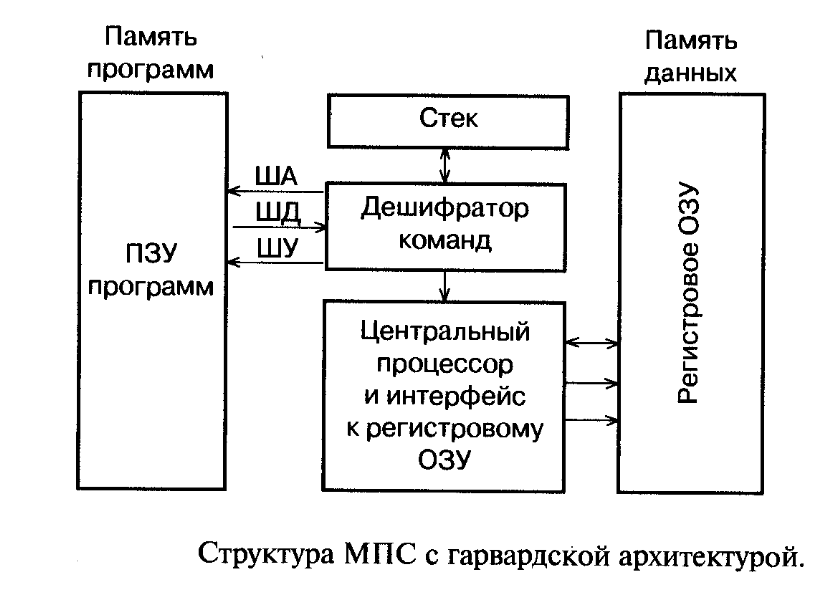 рхитектурой
вычислительного устройства называют
совокупность свойств и характеристик,
определяющих модель вычислительного
устройства с точки зрения пользователя.
Архитектура ВУ включает в себя его
внутреннюю структуру и систему команд.
Гарвардская архитектура означает
разделение памяти на память программ
и память данных, которые имеют свое
адресное пространство. Высокая скорость
выполнения команд в PIC-контроллерах
достигается за счет использования
двухшинной гарвардской архитектуры
вместо традиционной одношинной
фон-неймановской. Гарвардская архитектура
основывается на наборе регистров с
разделенными шинами и адресными
пространствами для команд и данных. Все
ресурсы микроконтроллера, такие как
порты ввода/вывода, ячейки памяти и
таймер, представляют собой физически
реализованные аппаратные регистры.
Микроконтроллеры PIC содержат RISC-процессор
с симметричной системой команд,
позволяющей выполнять операции с любым
регистром, используя произвольный метод
адресации. Пользователь может сохранять
результат операции в самом
регистре-аккумуляторе или во втором
регистре, используемом для операции.
Благодаря гарвардской архитектуре
процессор одновременно с доступом к
слову команды может обращаться к данным.
Центральный процессор микроконтроллера
содержит программный счетчик (РС),
мультиплексор адресов (МА),
арифметико-логическое устройство (АЛУ),
регистр команд (РК), устройство
декодирования команд, аккумулятор WREG
(рабочий регистр W). Внутренняя память
представлена ОЗУ данных, ППЗУ программ
и стеком двух уровней. Микросхема
содержит тактовый генератор, таймеры,
в том числе Т0, порты А, В, С, ввода-вывода,
схему сброса, схему прерываний и др.
Структура команды включает код операции
и адресную часть. Адресная часть указывает
на операнды, кот. могут быть константами
или переменными, для кот. указывается
адрес. Команда выполняется за 4 тактовых
периода: декодирование, выборка аргумента,
выполнение операции, сохранение
аргумента. Логические и арифметические
команды оперируют с рабочим регистром
WREG и одним аргументом. Система команд
МК содержит мин набор необходимых при
программировании операций. Таймеры МК
допускают режим таймера и режим счетчика
внешних импульсов. Микроконтроллер
имеет аппаратные модули, которые работают
без участия центрального процессора:
АЦП, компараторы, средства последовательного
интерфейса и др.
рхитектурой
вычислительного устройства называют
совокупность свойств и характеристик,
определяющих модель вычислительного
устройства с точки зрения пользователя.
Архитектура ВУ включает в себя его
внутреннюю структуру и систему команд.
Гарвардская архитектура означает
разделение памяти на память программ
и память данных, которые имеют свое
адресное пространство. Высокая скорость
выполнения команд в PIC-контроллерах
достигается за счет использования
двухшинной гарвардской архитектуры
вместо традиционной одношинной
фон-неймановской. Гарвардская архитектура
основывается на наборе регистров с
разделенными шинами и адресными
пространствами для команд и данных. Все
ресурсы микроконтроллера, такие как
порты ввода/вывода, ячейки памяти и
таймер, представляют собой физически
реализованные аппаратные регистры.
Микроконтроллеры PIC содержат RISC-процессор
с симметричной системой команд,
позволяющей выполнять операции с любым
регистром, используя произвольный метод
адресации. Пользователь может сохранять
результат операции в самом
регистре-аккумуляторе или во втором
регистре, используемом для операции.
Благодаря гарвардской архитектуре
процессор одновременно с доступом к
слову команды может обращаться к данным.
Центральный процессор микроконтроллера
содержит программный счетчик (РС),
мультиплексор адресов (МА),
арифметико-логическое устройство (АЛУ),
регистр команд (РК), устройство
декодирования команд, аккумулятор WREG
(рабочий регистр W). Внутренняя память
представлена ОЗУ данных, ППЗУ программ
и стеком двух уровней. Микросхема
содержит тактовый генератор, таймеры,
в том числе Т0, порты А, В, С, ввода-вывода,
схему сброса, схему прерываний и др.
Структура команды включает код операции
и адресную часть. Адресная часть указывает
на операнды, кот. могут быть константами
или переменными, для кот. указывается
адрес. Команда выполняется за 4 тактовых
периода: декодирование, выборка аргумента,
выполнение операции, сохранение
аргумента. Логические и арифметические
команды оперируют с рабочим регистром
WREG и одним аргументом. Система команд
МК содержит мин набор необходимых при
программировании операций. Таймеры МК
допускают режим таймера и режим счетчика
внешних импульсов. Микроконтроллер
имеет аппаратные модули, которые работают
без участия центрального процессора:
АЦП, компараторы, средства последовательного
интерфейса и др.
36. Функциональная схема микроконтроллера msp430 и назначение входящих в него устройств.
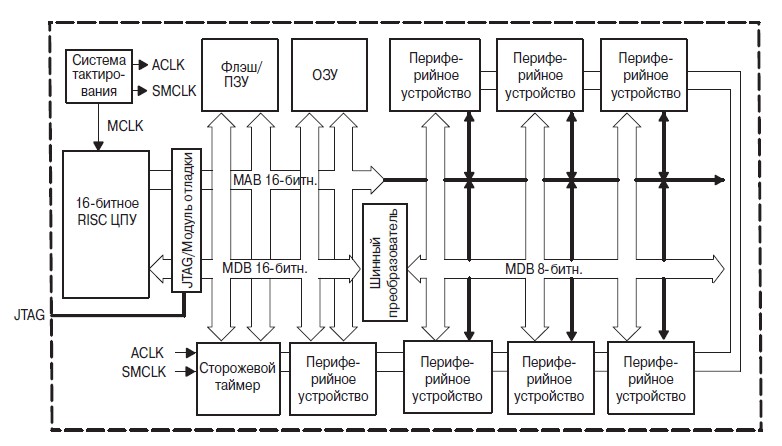
Микроконтроллеры семейства MSP430 имеют фон-неймановскую архитектуру и содержат 16-битное RISC ЦПУ, периферийные модули, а также гибкую систему тактирования, объединённые общими шинами адреса (MAB) и данных (MDB).
37. Функциональная схема микроконтроллера pic16 и назначение входящих в него устройств.
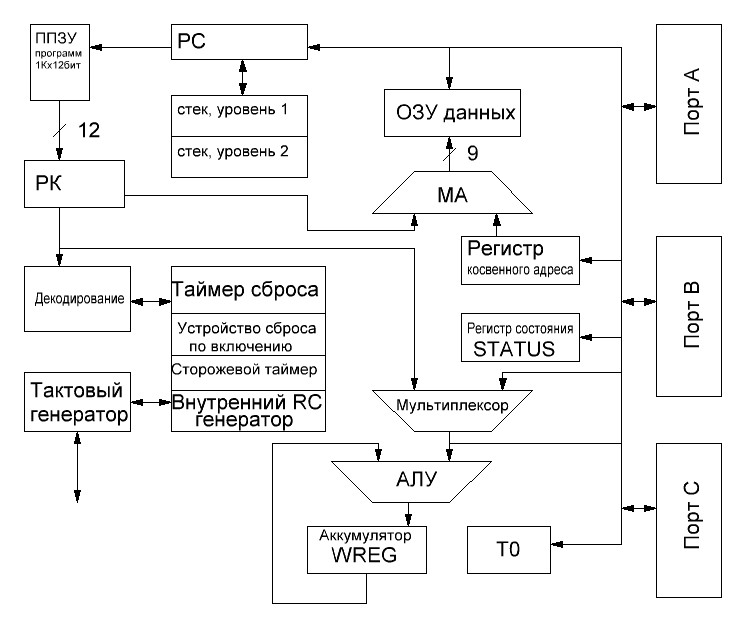
Центральный процессор микроконтроллера содержит программный счётчик (PC), мультиплексор адресов (MA), арифметико-логическое устройство (АЛУ), регистр команд (РК), устройство декодирования команд, аккумулятор WREG, называемый также рабочим регистром W. Внутренняя память представлена ОЗУ данных, ППЗУ программ и стеком двух уровней. Микросхема содержит тактовый генератор, таймеры, в том числе Т0, порты А, В, С, ввода-вывода, схему сброса, схему прерываний и, возможно другие устройства ввода-вывода.