1.2 Анализ динамических свйств объекта управления.
Проектирование систем автоматического регулирования необходимо вести на основе глубокого изучения объектов регулирования в реальных условиях. Динамические характеристики для сложных объектов аналитически получить сложно, а порой и невозможно за счёт упрощающих допущений, поэтому их получают экспериментальным путём.
Зависимость выходной и входной величин можно получить в переходных режимах в виде кривых разгона и импульсных характеристик или в режимах установившихся незатухающих колебаний в виде частотных характеристик.
Снятие кривой разгона проще, чем определение других динамических характеристик. Методика снятия с объектов следующая:
Прежде всего процесс приводится в состояние равновесия при определённой нагрузке. В таком режиме объект держится 2-3 минуты для подтверждения того, что равновесное состояние наступило.
После
этого наносится мгновенное возмущение
(изменение положения регулирующего
органа) и производится регистрация
входной и выходной величины. При этом
надо обратить внимание на чистое
запаздывание. Величина перемещения
регулирующего органа должна быть
достаточно большой для того, чтобы
посторонние возмущения не искажали
результатов эксперимента. Однако, нельзя
принять слишком большое перемещение
регулирующего органа. Это может привести
к выходу контролируемой величины за
допустимые пределы, к нарушению режима
работы объекта. Для дальнейших расчётов
следует указать величину возмущения. 
Снимем разгонную характеристику с ЗУМПФа гидрофола. Для этого откроем регулирующий орган подачи глиняного шлама на 10 % и подождём до тех пор, пока не наступит равновесное состояние. В течение этого времени, через определённые промежутки времени будем записывать значения выходной величины – вязкости. По этим данным построим графики, на которых изобразим величину мгновенного возмущающего воздействия и изменение во времени вязкости:
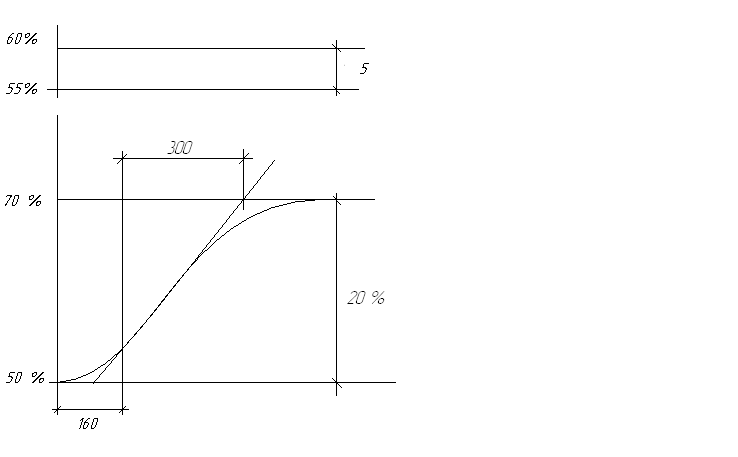
τ = 160 с – запаздывание в объекте
То = 300 с – постоянная времени объекта
Ко = 20/5 = 4 – коэффициент передачи объекта
1.3 Выбор параметров управления и управляющих воздействий.
Главной задачей системы управления является поддержание заданного химического состава сырья. В данном объекте реализуются контуры регулирования:
1
химический состав сырья на выходе из
сырьевой мельницы.
Корректировка осуществляется двумя дозаторами непрерывного действия подачей огарок и золы.
2. Для подачи мела предусмотрена следящая система, принцип которой заключается в следующем: на выходе из ЗУМПФа гидрофола установлен индукционный расходомер ИР-61 (поз 6а), из показаний которого вычитают показания расходомера под поз. 2а и получают количество мела, которое необходимое подать в гидрофол.
1.4 Выбор контроллируемых и сигнализируемых параметров.
Система автоматического регулирования имеет высокую надёжность, но в случае непредвиденных обстоятельств, необходимо предусмотреть дистанционное ведение технологического процесса.
Для этого нужно оборудовать рабочее место оператора органами дистанционного управления, а также предусмотреть контроль и сигнализацию параметров.
Система предусматривает контроль и сигнализацию основных параметров процесса и возможность дистанционного управления механизмами. Основные контролируемые параметры:
1 расход шлама после ЗУМПФа гидрофола.
2 уровень в вертикальном шлам бассейне.
3 расход шлама на участке трубы после вертикальных шламбассейнов.
4 уровень в болтушке
5 расход шлама поступаемого в сырьевую мельницу.
6 уровень в ЗУМПФе на выходе из сырьевой мельницы
7 расход шлама от насоса № 320, установленного на выходе из ЗУМПФа сырьевой мельницы № 6