

Вопрос 16(Лемма о параллельном переносе силы (лемма Пуансо).)
Произвольная плоская система сил
Лемма Пуансо. Действие силы на твердое тело не изменится, если перенести эту силу параллельно своему первоначальному положению в любую точку тела, приложив при этом к телу пару с моментом, равным моменту исходной силы относительно этой точки.
Доказательство:
 Пусть
сила
Пусть
сила ![]() приложена
к телу в некоторой его точке
приложена
к телу в некоторой его точке ![]() (рис.
3.8). Приложим в произвольной
точке
(рис.
3.8). Приложим в произвольной
точке ![]() параллельно
направлению линии действия силы
две
силы
параллельно
направлению линии действия силы
две
силы ![]() и
и ![]() ,
равные по модулю силе
и
направленные в противоположные стороны.
Полученная система сил {
,
,
}
,
равные по модулю силе
и
направленные в противоположные стороны.
Полученная система сил {
,
,
} ![]() .
Эту систему сил можно считать состоящей
из силы
,
полученной параллельным переносом
силы
в
точку
,
и пары (
,
),
называемой присоединенной парой с
моментом, равным моменту силы
относительно
точки
.
.
Эту систему сил можно считать состоящей
из силы
,
полученной параллельным переносом
силы
в
точку
,
и пары (
,
),
называемой присоединенной парой с
моментом, равным моменту силы
относительно
точки
.
Вопрос 17,18
Приведение плоской системы сил к данному центру (простейшему виду)
Пусть на тело действует система произвольно направленных, лежащих в одной плоскости сил .
Выберем в плоскости произвольную точку О, которую назовем центром приведения и перенесем в эту точку все силы (рис. 29, а )
В результате получим новую систему сил:
![]()
с моментами присоединенных пар:
![]()
Систему сил перенесенную в точку О заменим одной силой приложенной в той же точке О:
![]()
Сложение пар дает одну пару с моментом:
![]()
Вектор
,
равный геометрической сумме всех сил
называют главным
вектором системы.
Величину ![]() ,
равную сумме всех моментов относительно
центра О, называют главным
моментом системы
относительно центра О.
,
равную сумме всех моментов относительно
центра О, называют главным
моментом системы
относительно центра О.
Итак: Всякая плоская система сил, действующая на твердое тело при приведении к произвольно взятому центру О заменяется одной силой , равной главному вектору системы и приложенной в Центре приведения О, и одной парой с моментом , равным главному моменту системы сил относительно центра О.
Для задания плоской системы сил достаточно задать ее главный вектор и главный момент относительно некоторого центра О. Главный вектор не зависит от положения центра приведения O (рис. 29, б).
Главный момент зависит от положения центра приведения О и его всегда нужно указывать.
При приведении произвольно расположенных сил на плоскости к данному центру возникают стандартные случаи, называемые приведением системы к простейшему виду. Рассмотрим эти случаи, имея в виду, что определено согласно (4.2.3), а согласно (4.2.4):
![]()
Все силы, приложенные к твердому телу, уравновешиваются.
![]()
Все силы приводятся к одной паре сил.
![]()
Все силы приводятся к равнодействующей.
![]()
Заданная система сил так же приводится к равнодействующей.
В данной главе мы не приводим теорему Вариньона о моменте равнодействующей плоской системы, считая, что параграф 7 главы 2 дает представление как о самой теореме, так и о ее доказательстве.
Вопрос 19(Уравнения равновесия произвольной плоской системы сил в трех формах)
Уравнения равновесия произвольной плоской системы сил могут быть представлены в трех формах. Первая (основная форма этих уравнений) выведена выше:
![]()
Три уравнения равновесия для плоской системы сил соответствует трем возможным степеням подвижности тела в плоскости — двум перемещениям вдоль осей х и у и вращению вокруг произвольной точки плоскости.
При решении многих задач рациональнее пользоваться другими формами уравнений равновесия.
Так как при равновесии твердого тела сумма моментов всех приложенных к нему сил относительно любой точки равна нулю, то можно, выбрав три произвольные точки А, В, С и приравняв нулю сумму моментов относительно каждой из них, получить три следующих уравнения равновесия:
![]()
Это вторая форма уравнений равновесия. Точки А, В, С не должны лежать на одной прямой.
Третья форма уравнений равновесия представляет собой равенство нулю сумм моментов относительно двух произвольных точек А и В и равенство нулю суммы проекций на некоторую ось х:
![]()
При пользовании этой формой уравнений равновесия необходимо, чтобы ось х не была перпендикулярна линии, соединяющей точки А и В.
Для системы параллельных сил, выбрав одну из осей проекций, параллельной этим силам, а другую — перпендикулярной к ним, получим два уравнения равновесия (рис.35).
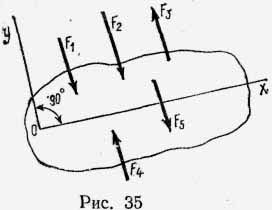
Первая форма уравнений равновесия для плоской системы параллельных сил примет вид:
![]()
При этом первое уравнение равновесия можно трактовать как равенство нулю алгебраической суммы всех заданных параллельных сил, так как на параллельную ось они проектируются в натуральную величину.
Вторая и третья формы уравнений равновесия для плоской системы параллельных сил примут одинаковый вид:
![]()
Итак, для произвольной плоской системы сил имеем три уравнения равновесия, а для плоской системы параллельных сил — только два. Соответственно при решении задач на равновесие произвольной плоской системы сил можно найти три неизвестных, а при рассмотрении равновесия плоской системы параллельных сил — не более двух. Если количество неизвестных превышает число уравнений статики, задача становится статически неопределимой.