

2.3.Кинематика твердого тела.
2.3.1.Простейшие движения твердого тела: поступательное и вращательное. Поступательное движение тела – это такое движение твердого тела, при котором любая прямая, проведенная в этом теле, перемещается, оставаясь параллельное самой себе. При поступательное движении. все точки тела описывают одинаковые траектории и имеют в каждый момент времени одинаковые по модулю и направлению скорости и ускорения.
Вращательное движение тела – это такое движение твердого тела, при котором все точки, принадлежащие некоторой прямой, неизменно связанной с телом, остаются неподвижными. Эта прямая называется осью вращения тела. При этом движении все точки тела движутся в плоскостях, перпендикулярных оси вращения, и описывают окружности, центры которых лежат на оси вращения. Уравнение (закон) вращательного движения: =f(t) – угол поворота тела в радианах. (1 рад= 180о/=57,3о).
Угловая
скорость:
![]() ,
[рад/с] – определяет изменение угла
поворота в единицу времени.
Вектор
угловой скорости
тела, совершающего вращение вокруг
неподвижной оси, направлен вдоль оси
вращения так, что если смотреть ему
навстречу вращение будет против часовой
стрелке. "n"–
число оборотов в мин. [об/мин], 1об=2
рад,
,
[рад/с] – определяет изменение угла
поворота в единицу времени.
Вектор
угловой скорости
тела, совершающего вращение вокруг
неподвижной оси, направлен вдоль оси
вращения так, что если смотреть ему
навстречу вращение будет против часовой
стрелке. "n"–
число оборотов в мин. [об/мин], 1об=2
рад,
![]() .
Угловое
ускорение тела:
.
Угловое
ускорение тела:
![]() ,
[рад/с2].
Вектор
углового ускорения
также направлен вдоль оси вращения. При
ускоренном движении совпадает по
направлению с угловой скоростью и
противоположно при замедленном вращении.
,
[рад/с2].
Вектор
углового ускорения
также направлен вдоль оси вращения. При
ускоренном движении совпадает по
направлению с угловой скоростью и
противоположно при замедленном вращении.
Частные случаи вращения тела: 1) Равномерное вращение:=const,=t, =/t.
2)
Равнопеременное вращение: =0+t;
![]() ,
здесь начальный угол 0=0.
,
здесь начальный угол 0=0.
Скорости
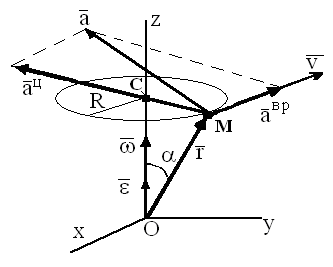
и ускорения точек вращающегося тела.
![]() – скорость любой точки твердого тела,
вращающегося вокруг неподвижной оси,
равна векторному произведению вектора
угловой скорости тела на радиус–вектор
этой точки. Модуль векторного произведения:
v=rsin()=
(CM),
(СМ) – расстояние от точки М до оси
вращения. Направлен вектор скорости по
касательной к окружности, по которой
перемещается точка М, в сторону вращения.
– скорость любой точки твердого тела,
вращающегося вокруг неподвижной оси,
равна векторному произведению вектора
угловой скорости тела на радиус–вектор
этой точки. Модуль векторного произведения:
v=rsin()=
(CM),
(СМ) – расстояние от точки М до оси
вращения. Направлен вектор скорости по
касательной к окружности, по которой
перемещается точка М, в сторону вращения.
Формула
Эйлера:
![]() ,
,
x,y,z
– проекции вектора угловой скорости.
Проекция вращательной (окружной)
скорости: vx=yz
– zy;
vy=zx
– xz;
vz=xy
– yx.
Если ось вращения совпадает с осью z,
то vx=
– y;
vy=x.
Ускорение:
![]() .
Вращательное (касательное, тангенциальное)
ускорение
.
Вращательное (касательное, тангенциальное)
ускорение
![]() ,
модуль вращательного. ускорения
авр=rsin,
направлено по касательной к траектории
точки, т.е. параллельно скорости.
Центростремительное (осестремительное,
нормальное) ускорение
,
модуль вращательного. ускорения
авр=rsin,
направлено по касательной к траектории
точки, т.е. параллельно скорости.
Центростремительное (осестремительное,
нормальное) ускорение
![]() ,
ац=2R,
направлено по радиусу к оси (центру)
вращения. Модуль полного ускорения.:
,
ац=2R,
направлено по радиусу к оси (центру)
вращения. Модуль полного ускорения.:
![]() .
Угол, между векторами полного и
центростремительного ускорений:
.
Угол, между векторами полного и
центростремительного ускорений:
![]() .
.
2.4.Сложное движение точки. – такое движение, при котором точка одновременно участвует в нескольких движениях (например, пассажир, перемещающийся по движущемуся вагону). В этом случае вводится подвижная система координат (Oxyz), которая совершает заданное движение относительно неподвижной (основной) системы координат (O1x1y1z1).
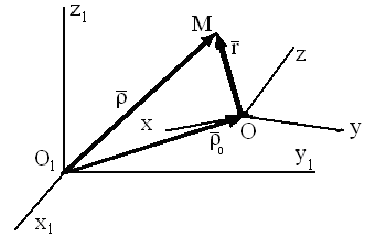
Абсолютным
движением
точки называется движение по отношению
к неподвижной системе координат.
Относительное
движение –
движение по отношению к подвижной
системе координат. (движение по вагону).
Переносное
движение –
движение подвижной системе. координат
относительно неподвижной (движение
вагона).
Теорема
о сложении скоростей:
![]() ,
,
![]() ;
;
![]() -орты
(единичные вектора) подвижной системы
координат, орт вращается вокруг мгновенной
оси, поэтому скорость его конца
-орты
(единичные вектора) подвижной системы
координат, орт вращается вокруг мгновенной
оси, поэтому скорость его конца
![]() и т.д., :
и т.д., :
![]() ,
,
![]() ;
;
![]() –
относительная скорость.
–
относительная скорость.
![]() ;
переносная скорость:
;
переносная скорость:
![]() ,
поэтому абсолютная скорость точки =
геометрической сумме ее переносной
(ve)
и относительной (vr)
скоростей
,
поэтому абсолютная скорость точки =
геометрической сумме ее переносной
(ve)
и относительной (vr)
скоростей
![]() ,
модуль:
,
модуль:
![]() .
.
Теорема
о сложении ускорений (теорема Кориолиса):

![]() и
т.д. Слагаемые выражения, определяющего
ускорения
и
т.д. Слагаемые выражения, определяющего
ускорения
![]() :
1)
:
1)
![]() –
ускорение полюса О;
–
ускорение полюса О;
2)

3)
![]() –
относительное ускорение точки;
–
относительное ускорение точки;
4)
![]() ,
,
получаем:
![]() .
.
Первые
три слагаемых представляют собой
ускорение точки в переносном движении:
![]() –
ускорение полюса О;
–
ускорение полюса О;
![]() – вращательное уск.,
– вращательное уск.,
![]() – осестремительное ускорение., т.е.
– осестремительное ускорение., т.е.
![]() .
Теорема о
сложении ускорений (теорема Кориолиса):
.
Теорема о
сложении ускорений (теорема Кориолиса):
![]() ,
где
,
где
![]() – ускорение Кориолиса (кориолисово
ускорение) – в случае непоступательного
переносного движения абсолютное
ускорение = геометрической сумме
переносного, относительного и кориолисова
ускорений. Кориолисово ускорение
характеризует: 1) изменение модуля и
направления переносной скорости точки
из-за ее относительного движения; 2)
изменение направления относительной
скорости точки из-за вращательного
переносного движения. Модуль ускорения
Кориолиса:
– ускорение Кориолиса (кориолисово
ускорение) – в случае непоступательного
переносного движения абсолютное
ускорение = геометрической сумме
переносного, относительного и кориолисова
ускорений. Кориолисово ускорение
характеризует: 1) изменение модуля и
направления переносной скорости точки
из-за ее относительного движения; 2)
изменение направления относительной
скорости точки из-за вращательного
переносного движения. Модуль ускорения
Кориолиса:
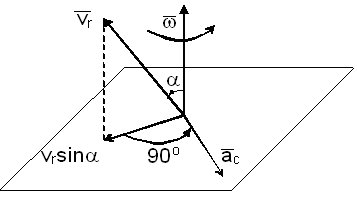
ас=
2|evr|sin(e^vr),
направление вектора
![]() определяется
по правилу векторного произведения,
или по правилу Жуковского: проекцию
относительной скорости на плоскость,
перпендикулярную переносной угловой
скорости, надо повернуть на 90о
в направлении вращения.
определяется
по правилу векторного произведения,
или по правилу Жуковского: проекцию
относительной скорости на плоскость,
перпендикулярную переносной угловой
скорости, надо повернуть на 90о
в направлении вращения.
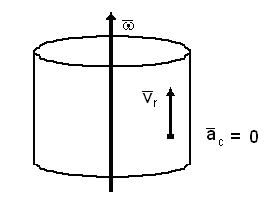
Кориолисово ускоре.ие = 0 в трех случаях: 1) e=0, т.е. в случае поступательного переносного движения или в момент обращения угловой. скорости в 0; 2) vr=0; 3) sin(e^vr)=0, т.е. (e^vr)=0, когда относительная скорость vr параллельна оси переносного вращения.
В случае движения в одной плоскости – угол между vr и вектором e = 90о, sin90o=1, ас=2evr.