

1.2.Основные типы связей и их реакции.
1. Гладкая опорная поверхность. Если твердое тело опирается на идеально гладкую (без трения) поверхность, то реакция поверхности R направлена по нормали к ней в точке соприкосновения, т. е. перпендикулярно к касательной плоскости в данной точке поверхности (рис 4). Такая реакция называется нормальной реакцией.

Рис. 4
2. Гибкая нить. (Рис. 5)
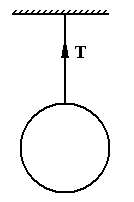
Рис. 5
T – сила натяжения нити, которая направлена вдоль нити и всегда от тела, равновесие которого будет рассматриваться.
3. Прямолинейный стержень, закрепленный шарнирно. (Рис. 6)
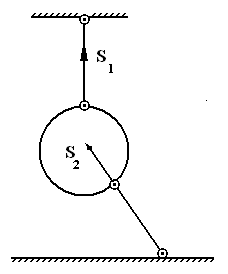
Рис. 6
S1 и S2 – реакции стержней, стержень 1 растягивается, стержень 2 сжимается,
4.
Цилиндрический шарник (подшипник).
Цилиндрическим
шарниром называется совокупность
неподвижного валика и надетой на него
втулки , соединенной с твердым телом
(рис.7 ). При этом твердое тело может
поворачиваться вокруг оси валика.
Направление реакции неподвижного
цилиндрического шарнира A
сразу указать нельзя, поэтому при решении
задач реакция шарнира заменяется двумя
взаимно перпендикулярными составляющими
XA
и YA.
Определив в ходе решения задачи XA
и YA
можно найти модуль и направление реакции
шарнира. Реакцию шарнира можно разложить
на составляющие по любым двум
направлениям.

Рис.7
Если цилиндрический шарнир подвижный (рис. 7шарнир В), то он не противодействует перемещению вдоль прямой, по которой могут катиться колеса, поэтому возникает только одна составляющая RB, перпендикулярная плоскости качения.
5. Сферический шарнир (подпятник). В случае сферического шарнира
(рис. 8) также нельзя заранее указать направление реакции шарнира При решении задач реакция сферического шарнира заменяется тремя взаимно перпендикулярными составляющими XA, YA, ZA. (рис. 8).

Рис. 8
6. Жесткая заделка. Такой тип связи будет рассмотрен позже.
1.3.Порядок решения задач статики на равновесие твердого тела. Выбирается объект равновесия (некоторое твердое тело).
Показываются активные силы, приложенные к объекту равновесия.
Применяется аксиома освобождаемости от связей: связи мысленно отбрасываются, а их действие заменяется реакциями связей, приложенными к объекту равновесия.
Определяется вид системы сил, действующей на объект равновесия, и составляются соответствующие уравнения (условия) равновесия.
Решая уравнения, определяются неизвестные величины.
Эта инструкция для решения задач статики - универсальная, с ее помощью решаются любые задачи статики на равновесие твердого тела.
Чаще всего в задачах статики требуется определить реакции связей, т.е. усилия, возникающие в местах закрепления. Условия равновесия, которые применяются в 4-м пункте инструкции, зависят от вида системы сил, действующей на объект равновесия. Можно выделить три основных вида: сходящаяся система сил, произвольная плоская система сил, произвольная пространственная система сил.
1.4.Сходящаяся
система сил.
Система
сил называется сходящейся,
если линии действия сил пересекаются
в одной точке. Сходящуюся систему сил
можно заменить равнодействующей
геометрическим или векторным способом
(рис. 9)![]() или
аналитически по формулам (1)- (4).
или
аналитически по формулам (1)- (4).

Рис. 9
![]() , (
, (![]() 1)
1)
![]()
![]()
![]() (2)
(2)
![]() , (3)
, (3)
![]()
![]() (4)
(4)
Условия равновесия сходящейся системы сил. Для равновесия сходящейся системы сил необходимо и достаточно, чтобы выполнялись условия:
1. геометрическое или векторное условие: силовой многоугольник, построенный на векторах сил как на сторонах должен быть замкнут
(рис.
10)
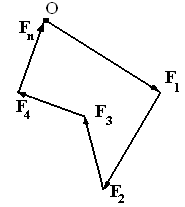
Рис.10
![]() , или
, или ![]() (5)
(5)
2. Аналитические уравнения равновесия:
![]() ,
, ![]() ,
, ![]() (6)
(6)
Если все силы сходящейся системы лежат в одной плоскости то следует выбрать систему координат в этой плоскости и использовать только два уравнения.
1.5.Произвольная плоская система сил. Если плоская система сил не является сходящейся, то для вывода условий равновесия нужно заменить систему сил на более простую. Это называется приведением системы сил. Для этого нужно ввести дополнительные понятия и термины. Момент силы относительно точки на плоскости (алгебраический) –это взятое со знаком плюс или минус произведение модуля силы на плечо силы относительно точки. Плечо силы относительно точки – это кратчайшее расстояние от точки до линии действия силы, т е длина перпендикуляра, опущенного из точки на линию действия силы (рис. 11)
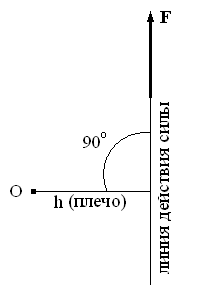
Рис. 11
![]() (7)
(7)
Если сила стремится повернуть плечо против часовой стрелки ( как на рис. 11), то знак момента «+», если по часовой, то « - ».
Парой сил называется система двух равных по модулю сил, направленных в противоположные стороны по параллельным линиям действия. Обозначается пара сил (F,F'). Плечом пары называется расстояние между линиями действия сил, образующих пару. Момент пары (алгебраический на плоскости) это взятое со знаком плюс или минус произведение модуля силы на плечо пары m (F,F')=+-F h (8)
Знак
момента выбирается по тому же правилу,
что и для момента силы относительно
точки. (Рис 12).

Рис. 12
Теоремы о свойствах пар в плоскости.
Момент пары сил равен алгебраической сумме моментов сил образующих пару, вычисленных относительно произвольной точки на плоскости.
Две пары сил, лежащие в одной плоскости , эквивалентны тогда и только тогда, когда равны их алгебраические моменты.
Система пар сил, лежащих в одной плоскости, эквивалентна одной паре, момент которой равен алгебраической сумме моментов этих пар.
Система пар сил, лежащих в одной плоскости, уравновешивается тогда и только тогда, когда алгебраическая сумма моментов этих пар равна нулю.
Из теорем следует, что пара сил создает только вращательное воздействие и для полной характеристики пар, лежащих в одной плоскости достаточно алгебраического момента пары. Поэтому на расчетных схемах задач пары можно показывать в виде символа пары или в виде дуговой стрелки, направленных в сторону вращения, создаваемого парой, и с обозначением или численным значением момента пары (рис. 13).

Рис. 13
После введенных понятий момента силы и момента пары, можно рассмотреть еще один типовой вид связи , который называется "жесткая заделка".
Жесткая заделка.(Рис. 14) Балка АВ не может в месте закрепления А ни перемещаться ни вращаться, поэтому реакции такого типа связи имеют составляющие XA,YA,MA, где МА – это момент пары сил, противодействующий вращению балки вокруг точки А.

Рис. 14
По теореме Пуансо произвольную плоскую систему сил можно заменить на одну силу (главный вектор R`, приложенный в выбранном центре приведения О) и одну пару сил (главный момент mO), лежащую в плоскости действия сил:
![]() ,
,
![]() .
(9)
.
(9)
Условия равновесия произвольной плоской системы сил. Для равновесия произвольной плоской системы сил необходимо и достаточно чтобы главный вектор R’ и главный момент mO относительно произвольно выбранного центра приведения равнялись нулю,
![]() ,
, ![]() ,
(10)
,
(10)
или в аналитической форме
, ![]() (11)
(11)
Оси x, y системы координат и точку в уравнении моментов можно выбирать произвольно.
Теорема Вариньона для произвольной плоской системы сил. Если система сил приводится к равнодействующей, то момент равнодействующей относительно произвольной точки равен сумме моментов слагаемых сил относительно той же точки
1.6.Произвольная пространственная система сил. Вывод условий равновесия для произвольной пространственной системы сил аналогичен тому, как это проводилось для произвольной плоской системы сил. Только для оценки вращательного воздействия силы и пары сил потребуются векторные моменты силы и пары сил, а также алгебраический момент силы относительно оси.
Векторный момент силы относительно точки в пространстве определяется по формуле:
![]() , (12)
, (12)
где
![]() -
радиус-вектор точки приложения силы
-
радиус-вектор точки приложения силы
![]() (рис. 15).
(рис. 15).

Рис. 15
Введенный таким образом векторный момент силы относительно точки
полностью характеризует вращательное воздействие силы, так как определяется плоскость и направление вращения, создаваемого силой, а также численное значение модуля векторного момента равного моменту силы относительно точки в плоскости силы F и точки O:
![]() .
(13)
.
(13)
Для оценки вращательного воздействия пары сил также вводится понятие векторного момента пары сил в пространстве. Векторным моментом пары сил называется вектор равный по модулю моменту пары, и направленный перпендикулярно плоскости пары в ту сторону , откуда вращение , создаваемое парой видно против хода часовой стрелки(рис. 16).

Рис. 16
Теоремы о свойствах пар в пространстве.
Эти теоремы аналогичны теоремам для пар в плоскости.
Векторный момент пары сил равен векторной сумме векторных моментов сил образующих пару, вычисленных относительно произвольной точки в пространстве.
Две пары сил в пространстве эквивалентны тогда и только тогда, когда равны их векторные моменты.
Система пар сил в пространстве эквивалентна одной паре, векторный момент которой равен векторной сумме векторных моментов этих пар.
Система пар сил в пространстве уравновешивается тогда и только тогда, когда векторная сумма векторных моментов этих пар равна нулю.
Векторные моменты силы и пары сил – это свободные векторы, их можно переносить в пространстве параллельно себе в любую точку.
Момент силы относительно оси в пространстве определяется следующим образом: (рис. 17)
проводится плоскость П, перпендикулярная оси
находится проекция FП силы F на плоскость П
момент силы относительно оси находится как алгебраический момент проекции FП относительно точки пересечения оси z и плоскости П.

Рис. 17
По теореме Пуансо произвольная пространственная система сил приводится к главному вектору R` и главному моменту MO
![]() ,
,
![]() . (14)
. (14)
Условия равновесия произвольной пространственной системы сил.
Для
равновесия произвольной пространственной
системы сил необходимо и достаточно
чтобы главный вектор R’
и главный момент MO
относительно произвольно выбранного
центра приведения равнялись нулю
![]() ,
, ![]() ,
(15)
или в аналитической
форме:
,
,
,
(15)
или в аналитической
форме:
,
, ![]() ,
,
![]()
![]()
![]() (16)
(16)
Оси x, y, z системы координат можно выбирать произвольно.