2.2Чувствительные элементы датчиков давления
Чувствительные элементы определяются упругой характеристикой, чувствительностью, жесткостью, эффективной площадью (для мембран и сильфонов), резонансными частотами и точностью преобразования измеряемого параметра.
Упругой характеристикой принято называть зависимость между перемещением λ определенной (измерительной) точки упругого элемента и величиной нагрузки Р (давление). Конструкция, способ заделки и вид нагружения упругого элемента определяют его характеристику, которая может быть линейной и нелинейной, возрастающей или затухающей.
Нелинейностью η характеристики называют наибольшее отклонение Δmax действительной характеристики (полученной экспериментально) от теоретической линейной, отнесенное к наибольшему перемещению измерительной λmax точки упругого элемента, обычно выражаемое в процентах:
![]()
Чувствительность S упругого элемента является одним из основных его параметров и выражается отношением:
![]() .
.
Для упругих элементов с линейной характеристикой:
![]() .
.
Понятие эффективной площади вводят для мембран и сильфонов:
![]() ,
,
где Q – сила, которую развивает мембрана или сильфон в измерительной точке под воздействием давления р.
Эффективную площадь определяют по приближенным формулам.
Резонансные частоты колебаний упругих элементов датчиков в значительной степени определяют их динамические характеристики и запаздывание в преобразовании измеряемого давления. В практике резонансные частоты определяют в основном экспериментальным путем.
Типы упругих элементов
Таблица 1
|
Типы упругих элементов.Конструктивная схема |
Наименование |
Тип датчика Расчетные зависимости Габаритные размеры, мм |
|
|
Балка, заделанная с двух сторон |
Тензорезисторные датчики контактных давлений:
h = 0.1 - 0.3 , l = 2 - 5 , b = 2 - 4 |
|
|
Цилиндрическая пружина сжатия |
Гальваномагнитные датчики давления.
где С – жесткость; n – число рабочих витков.
Dср = 2 - 3 ,d = 0.1 - 0.2 ,h = 6 -15 |
|
|
Струна |
Частотные датчики давления
d = 0.05 - 0.2 , l = 40 – 100 |



Продолжение таблицы 1
|
Конструктивная схема |
Наименование |
Тип датчика Расчетные зависимости Габаритные размеры, мм. |
|
|
Плоская мембранная плита, выполненная за одно целое с корпусом датчика. |
Применяется в емкостных датчиках, рассчитанных на высокие давления.
D=11 , h=1 |
|
|
Плоская мембранная плита с жестким центром. |
Емкостные на высокие давления.
D=11 , d=1 - 2 , h=1 |
|
|
Плоская мембрана, защемленная с двух сторон в корпус датчика. |
Полупроводниковые Датчики давления
D=2.5 - 10 , h=0.2 - 05 |
|
|
Плоская сварная мембрана |
Тензорезисторные, гальваномагнитные и емкостные датчики давления.
D=5 - 20 , h=0.1 - 0.4 |
|
|
Плоская мембрана с выпуклым жестким центром. |
Тензорезисторные датчики контактных давлений
D=2.5 - 4 , h=0.1- 0.2
|





Продолжение таблицы 1
|
Конструктивная схема |
Наименование |
Тип датчика Расчетные зависимости Габаритные размеры, мм. |
|
|
Плоская колпачковая мембрана |
Тензорезисторные датчики давления
D = 3 – 10 , h = 0.05 – 0.17 |
|
|
Гофрированная мембрана с тороидальным краевым гофром и линейной характеристикой. |
Тензорезисторные и гальваномагнитные датчики давления
D = 20 - 35 , h = 0.05 – 0.1 |
|
|
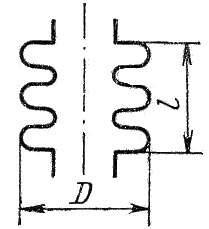
Малогабаритный сварной сильфон. |
Гальваномагнитные датчики давления
D = 3 –5 , l = 5 - 10 |
|
|
Точечный сильфон с одним гофром, работающий на изгиб. |
Струнные датчики давления
D=12 , h=0.2 |
|
|
Обычный малогабаритный сильфон |
Гальваномагнитные датчики давления
D = 10 - 40 , h = 0.1 - 0.2 |
|
|
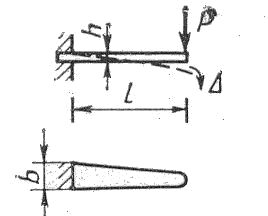
Балка равного сопротивления |
Тензорезисторные датчики давления
h = 0.1 - 0.5 , l = 10 - 20 |