

4 Выбор оборудования
4.1Выбор станка
Наша деталь является телом вращения, для обработки таких деталей наиболее удобным будет использование токарного станка.
Токарный станок с чпу cke 6136z/1000
![]()

![]()
Техническое описание
Станок CKЕ 6136Z является токарным станком типа CNC нового поколения, разработанным корпорацией Sigerlind, характеризуется высокой степенью точности и большой эффективностью. Эта модель станка имеет программируемую инструментальную револьверную головку. Станок предназначен для токарной обработки наружных и внутренних поверхностей деталей типа тел вращения ступенчатого и криволинейного профиля, а также для нарезания резьб.Обработку можно производить в один или несколько проходов в замкнутом полуавтоматическом цикле одновременно по двум координатам.
Станок оснащен системой ЧПУ FANUC (типа CNC), количество осей управления - 2+1шпинд (2D), тип - замкнутый (импульсный ДОС). Изготавливаются два вида шпиндельной бабки (на выбор заказчика): а) с ручным переключением передач (КС); б) с частотным регулированием (вариатор). Револьверная головка оснащена муфтой для быстрой и плавной индексации инструмента. Возможна установка револьверной головки с сервоприводом. Рабочее пространство закрывается защитными кожухами. Станок имеет удобный доступ к пульту ЧПУ, пульт можно передвигать. Станки изготавливаются с длиной обработки 750 и 1000мм.
В базовой комплектации станок оснащен автоматической системой смазки направляющих и ШВП, местным освещением, электромагнитным тормозом, 6-позиционной револьверной головкой (возможна поставка 8-позиционной), 3-х кулачковым патроном, набором ключей и инструмента.
|
Техническая характеристика | |
|
Диаметр обработки над станиной, мм |
360 |
|
Ширина станины, мм |
300 |
|
Расстояние между центрами, мм |
1000 |
|
Диаметр обработки над суппортом, мм |
180 |
|
Перемещение по X, мм |
205 |
|
Перемещение по Z, мм |
870 |
|
Размер патрона, мм |
200 |
|
Конус шпинделя |
M6 |
|
Диаметр отверстия в шпинделе, мм |
52 |
|
Диапазон скоростей шпинделя (частотник), об/мин |
75-2500 |
|
Коробка переключения передач вращения шпинделя |
2-х ступенчатая |
|
Общая мощность двигателя, кВт |
5,5 |
|
Быстрые перемещения по осям x/z, мм |
4/5 |
|
Точность установки инструмента, мм |
0,008 |
|
Точность позиционирования по x/z, мм |
0,02 |
|
Время смены инструмента, с |
2 |
|
Диаметр пиноли задней бабки, мм |
60 |
|
Ход пиноли, мм |
130 |
|
Конус задней бабки |
M4 |
|
Габариты станка, мм |
2550x1480x1520 |
|
Масса станка, кг |
1650 |
4 .2 Выбор пр
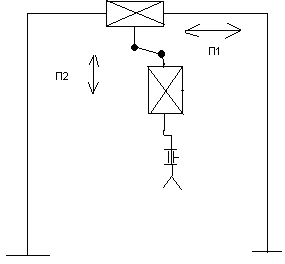
При анализе технологического оборудования, намечаемого к использованию в РТК, оценивают габаритные размеры, размеры рабочей зоны, условия подачи заготовок, уточняют перемещения заготовки при ее установке и снятии с оборудования. В РТК входит ПР, состоящий из следующих частей: исполнительного устройства робота, выполняющего все его двигательные функции (в общем случае это манипулятор и устройство передвижения), устройства управления и рабочего органа (захватное устройство).
Промышленный робот - автоматическая машина, представляющая собой совокупность манипулятора и перепрограммируемого устройства управления, для выполнения в производственном процессе двигательных и управляющих функций, заменяющих аналогичные функции человека при перемещении предметов производства и технологической оснастки.
 На
основе выбранного станка выбираем
следующий промышленный робот
серии M-710iC/T
На
основе выбранного станка выбираем
следующий промышленный робот
серии M-710iC/T
|
Подвесные роботы серии M-710iC/T - это шестикоординатные, сервоприводные портальные роботы средней грузоподъемности, относящиеся к последнему поколению семейства Toploader. Серия M-710iC/T разработана для манипулирования материалами и обслуживания станков. Также, эти роботы подходят для последующей обработки деталей и материалов с целью повышения их характеристик. Роботы M-710iB/45T и M-710iB/70T идеально подходят для манипулирования деталями и материалами средней и большой массы. | |
|
Максимальная грузоподъемность: 45 кг |
Радиус действия: 1706 мм |
|
Точность позиционирования: 0,07 мм |
Количество осей: 6 |
|
Размах: J1: ° J2: 260° J3: 420° J4: 540° J5: 250° J6: 720° |
Угловая скорость: J1: °/сек J2: 120°/сек J3: 150°/сек J4: 240°/сек J5: 240°/сек J6: 340°/сек |
|
Область применения: механическая обработка, перемещение деталей, сборка |
|