

Министерство образования и науки Российской Федерации
Агентство по высшему образованию.
Московский Авиационный Институт
(Государственный технический университет)
Кафедра: “305”.

Отчет по лабораторной работе
Выполнил: студент группы у1-401: Бордуков с.В.
Руководитель: Корягин л.И.
Содержание
Основные свойства гироскопов………………………………… стр.
Свободный гироскоп……………………………………………. стр.
Авиагоризонт………………………………………………...….. стр.
ГПК……………………………………………….………………. стр.
2-х степенный гироскоп…………………………………………. стр.
Навигационные системы………………………………………… стр.
Гиростабилизированные платформы…………………………… стр.
Список литературы………………………………………………. стр.
Основные свойства гироскопов
В переводе с греческого слово «гироскоп» означает «указатель вращения». Поэтому под гироскопом можно понимать любое устройство, предназначенное для обнаружения (и измерения) вращения в инерциальном пространстве.
Поскольку в настоящее время наибольшее распространение получили гироскопы с быстровращающимся ротором, реализованным в виде электродвигателя с частотой вращения до 60000 об/мин, то гироскопом называют симметричный быстровращающийся ротор, подвешенный так, чтобы центр его масс совпадал с центром подвеса.
Указанный способ подвеса гироскопа сообщает ему две или три степени свободы вращательного движения, что обеспечивается соответствующим устройством подвеса.
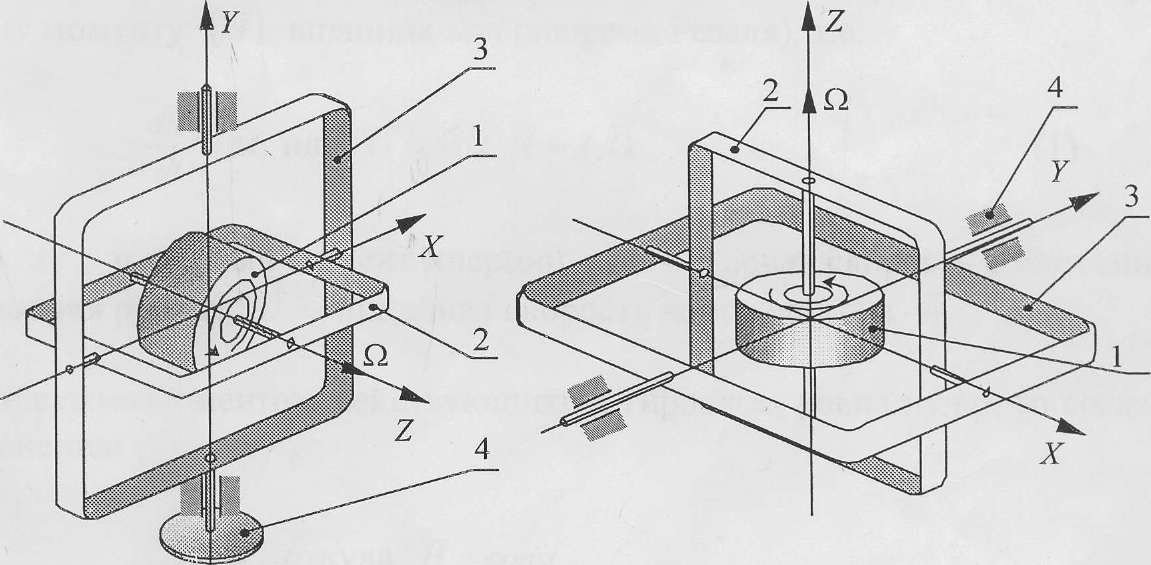
Гироскопом
называют быстро вращающееся относительно
главной оси симметрии
тело, имеющее две или три степени
свободы. Для обеспечения степеней
свободы обычно применяют карданный
подвес. Ось ОZ
симметрии ротора 1 называют осью фигуры,
главной осью или осью собственного
вращения гироскопа.
Ротор гироскопа 1 с большой угловой скоростью D. вращается вокруг оси ОZ во внутренней рамке 2, которая, в свою очередь, может поворачиваться вокруг оси ОХ относительно внешней рамки 3, а последняя - вокруг оси 07 относительно неподвижного основания 4 (схема расположения гироскопа относительно основания может быть различной, рис. 1, а и б). Обычно стремятся, чтобы ось 0Z была перпендикулярна осям 0Z и ОХ, и чтобы они пересекались в одной точке 0. В этом случае точка О будет являться неподвижной при любых угловых движениях основания.
Основные свойства гироскопа вытекают
непосредственно из теоремы о кинетическом
моменте (теоремы Резаля), которая
применительно к гироскопу формулируется
следующим образом: линейная скорость
конца вектора кинетического момента
![]() геометрически равна результирующему
моменту
геометрически равна результирующему
моменту
![]() внешних сил, т.е.
внешних сил, т.е.
![]() U=M, H=Jz Ω (1),
U=M, H=Jz Ω (1),
где Jz - полярный момент инерции; Ω - угловая скорость собственного вращения ротора; U - линейная скорость конца вектора Н.
Кинематический момент
Кинетический момент ротора гироскопа равен произведению экваториального момента инерции ротора и относительной угловой скорости.
![]()