

18 Привод механизмов подачи
1) Приводом называется совокупность механизмов, получающих энергию извне и
передающих ее рабочим элементам станка, в результате чего последние получают
необходимые движения.
В современных станках почти исключительно применяется индивидуальный привод, при
котором каждая машина или даже •отдельные узлы приводятся в движение отдельным
электродвигателем.
2) Привод не только передает движение, обычно он обеспечивает также и изменение
скорости перемещения рабочих органов. Регулирование скорости может быть плавным
( бесступенчатым)
и ступенчатым—привод имеет известное
число вполне определенных
бесступенчатым)
и ступенчатым—привод имеет известное
число вполне определенных
скоростей.
3) Бесступенчатое регулирование .скорости выполняется либо за счет изменения числа
оборотов электродвигателя, либо за счет применения гидравлических механизмов, в
которых скорость движения регулируется путем изменения количества поступающего
масла, либо механическими бесступенчатыми приводами, так называемыми
вариаторами.
4) Ступенчатое изменение скорости производится механизмами с зубчатыми колесами,
ременными и цепными передачами, переключение которых позволяет получить
различные и вполне
определенные скорости движения рабочих органов. Сочетание этих механизмов в
различных вариантах дает возможность получить коробки скоростей (в механизмах
главного движения) и коробки подач (механизмы привода подачи) со значительным
числом скоростей
Рабочие органы механизмов подач с вращательным дви-жением имеют небольшую частоту вращения, но передают боль-шой крутящий момент. В связи с этим приводы механизмов по-дач, передавая движение от электродвигателя, понижают частоту вращения и пропорционально повышают крутящий момент.
Приводы могут быть нерегулируемые и регулируемые.
В нерегулируемом приводе используется асинхронный электродвигатель трехфазного переменного тока единой серии 4А с каким-либо редуктором или мотор-редуктор. В приводах используются различные редукторы [17]: цилиндрические одно-ступенчатые узкие типа ЦУ с передаточным числом u = 2-6,3, двухступенчатые типа Ц2У с u = 8-40, конические цилиндриче-ские типа КЦ1 с u = 6,3-28, червячные редукторы РЧУ с u = 8-80 и др.
Мотор-редукторы выпускаются одноступенчатые типа МЦ и двухступенчатые соосные типа МЦ2С. Частота вращения выходного вала мотор-редуктора первого типа выбирается в диа-пазоне 224-450 мин-1, а для второго типа – 28-180 мин-1.
19. Кинематический привод подач
В отличии от привода главного движения является тихоход. с большей степенью
редукции. Наибольшее распространение в качестве механизмов, преобразующих вращательное движение в поступательное имеют в станках механизм винт-гайка, кулачковые, колесо - рейка.
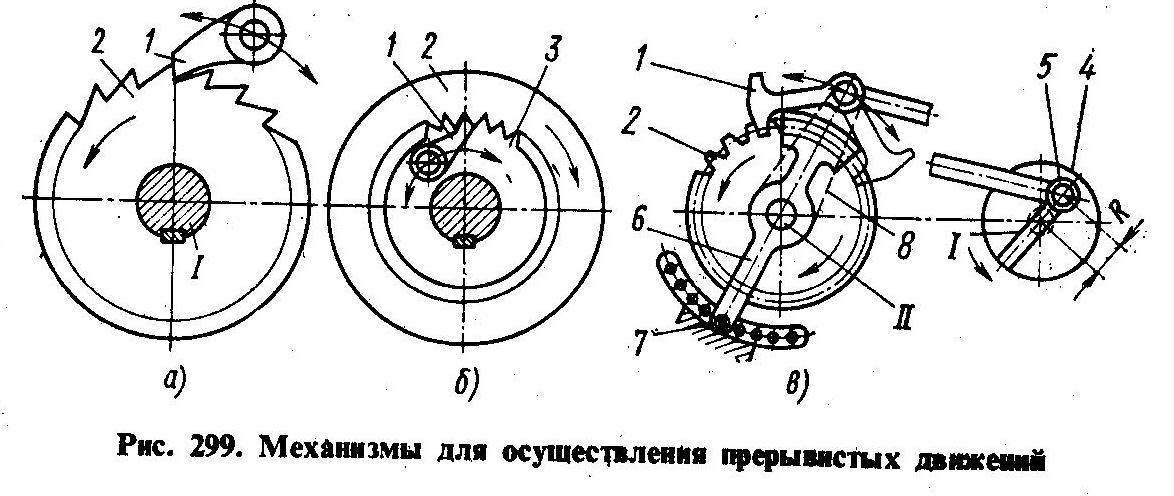
20. Механизмы для осуществления периодических движений
В качестве этих механизмов используют в основном храповый и мальтийский механизм.
На фигуре а) собачка 1, получая качательное движение, захватывает зубья храпового колеса 2 и поворачивает его вокруг оси вала I в одном направлении. Возвращаясь в исходное положение, собачка проскальзывает по зубьям, и последние остаются в покое
б)Собачка 1 установлена на диске 3, вал которого совершает качательное движение. При этом собачка захватывает зубья храпового колеса 2 и периодически вращает его также в одну сторону.
в) совершает качательные движения с помощью кривошипно-шатунной передачи. На ведущий вал I, непрерывно вращающийся с определенной скоростью от привода станка, насажен диск 4 с кривошипным пальцем 5. При вращении диска шатун качает рычаг 8 с установленной на нем собачкой 1 вокруг оси вала II. Величину угла качания рычага 8 можно регклировать, перемещая палец 5 по радиальному пазу на заданное расстояние R. Угол поворота храпового колеса 2 можно регулировать спомощью щитка 6, перекрывающего на пути качения собачки несколько зубьев храпового колеса. Фиксирование щитка в нужном направлении, при котором будет перекрыто необходимое число зубьев, осуществляется с помощью муфты 7.
Для периодического поворота валов на заданный угол принимают мальтийский механизм.
О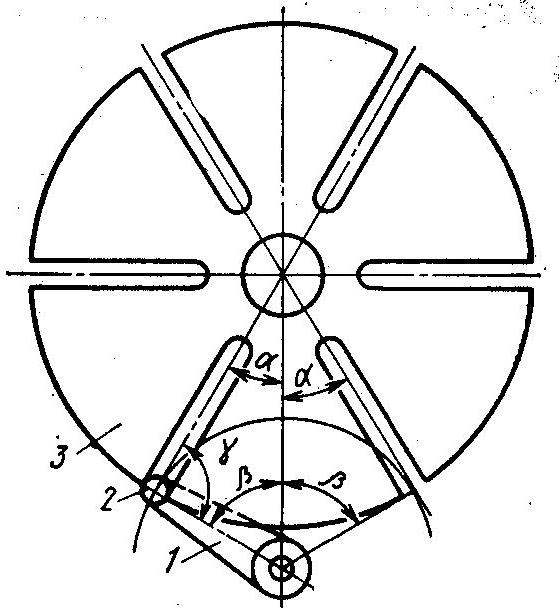 н
сосотоит из кривошипа 1 с цевкой 2 на
конце и диска 3, имеющего радиальные
пазы. Кривошип вращается непрерывно.
В определенный момент цевка входит в
паз и, повернувшись на угол 2
вместе с диском 3, выходит из него. Диск
останавливается до попадания цевки
при заходе ее в паз совпадала с
направлением последнего. Это возможно,
если
н
сосотоит из кривошипа 1 с цевкой 2 на
конце и диска 3, имеющего радиальные
пазы. Кривошип вращается непрерывно.
В определенный момент цевка входит в
паз и, повернувшись на угол 2
вместе с диском 3, выходит из него. Диск
останавливается до попадания цевки
при заходе ее в паз совпадала с
направлением последнего. Это возможно,
если
 ;
угол поворота диска
;
угол поворота диска
 ;
z-число
пазов
;
z-число
пазов
Угол
рабочего проворота кривошипа 2=-2.
Подставляем в это равенство значение
2:![]()
Если n-частота вращения кривошипа(об/с) и Т-время поворота диска на угол 2, а кривошипа – на угол 2, то вал кривошипа поворачивается на угол 2 за 1/n с, на угол 2-за Т=2/2·(1/n) сек.
Частота вращения кривошипа n=/Т об/сек.
Зна частоту вращения кривошипа можно определить число пазо диска.