8. Ковочные манипуляторы. Основные параметры ковочных манипуляторов
Для выполнения транспортных и технологических операций при производстве поковок применяются подъемно-транспортные машины, называемые манипуляторами. Они обеспечивают захват и удержание заготовки, перемещение ее в вертикальной и горизонтальной плоскостях, вращение заготовки вокруг своей оси. Эти машины обладают большой универсальностью, маневренностью и позволяют повысить производительность ковочных агрегатов в 1,5—2 раза.
Манипуляторы бывают рельсовые, безрельсовые и подвесные. В свою очередь рельсовые манипуляторы разделяются на мостовые ширококолейные без поворота и с поворотом хобота вокруг вертикальной оси; тележечные узкоколейные без поворота и с поворотом хобота вокруг вертикальной оси; с мостом, вращающимся по круговому рельсу, уложенному на полу цеха.
Подвесные имеют грузоподъемность до 750кг, их достоинство: малая занимаемая производственная площадь.
Напольные ковочные манипуляторы бывают безрельсовые и рельсовые.
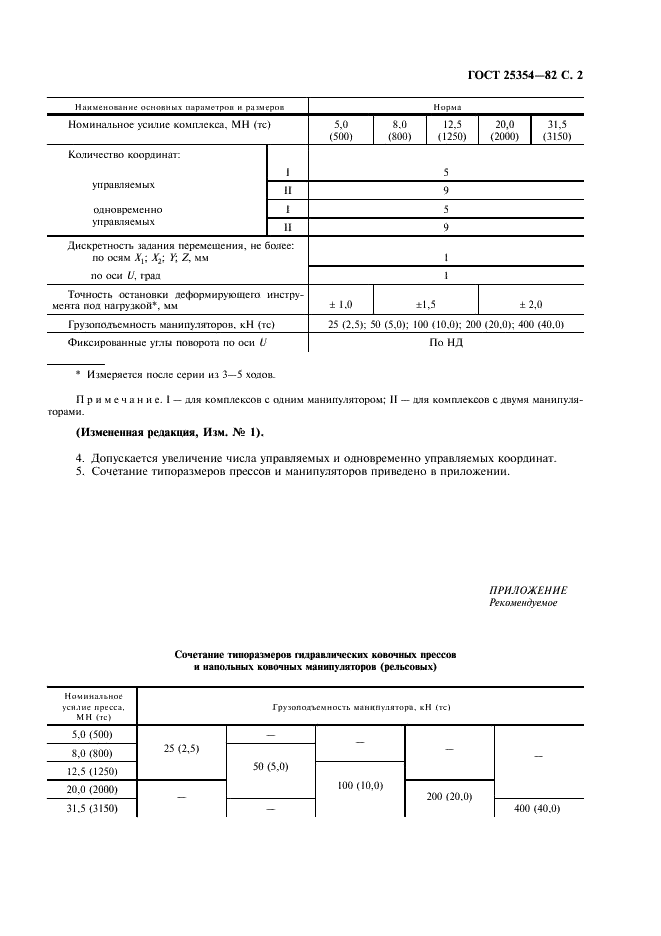
Основные параметры и размеры манипуляторов регламентируются межгосударственным стандартом, также регламетрируются параметры ковочных комплексов, и комплексов с программным управлением.
Основные параметры:
1-грузоподъемность-это максимальная масса слитка, заготовки с которой может манипулировать манипулятор.
2-высота оси ковки - это расстояние от верхней кромки рельса до оси хобота при его горизонтальном положении.
3-грузовой момент - это произведение массы заготовки на расстояние от центра захвата до центра тяжести манипулятора. Измеряется в [т.м].
4-максимальное раскрытие клещей – характеризует максимальный диаметр слитка.
5-скорость перемещения по всем возможным направлениям.
6-скорость подъема или скорость качания хобота.
7-скорость вращения хобота вокруг собственной оси.
Механизм зажима должен обеспечивать удержание заготовки при любом угловом положении плоскости клещевых рычагов, механизм перемещения — реверсивное перемещение манипулятора с требуемыми скоростями, механизм подъема — подъем, надежное удержание поковки в любом положении и горизонтальное положение хобота на любой высоте ковки.