

2.3. Датчики положения механизма.
В подавляющем большинстве станочного оборудования с числовым программным управлением используются измерительные преобразователи перемещения с импульсным или цифровым выходными сигналами. К ним относятся измерительные электромагнитные, электромашинные и фотоэлектрические преобразователи перемещения исполнительного механизма. В подавляющем своем большинстве точное математическое представление измерительных преобразователей перемещения требует использование дискретной математики. Однако для широкого класса систем автоматического управления возможно представление таких устройств как безинерционных элементов с передаточной функцией вида:
![]() ;
;
где
![]() –
разрешающая способность измерительного
преобразователя перемещения,
–
разрешающая способность измерительного
преобразователя перемещения,
![]() –
выходной сигнал измерительного
преобразователя;
–
выходной сигнал измерительного
преобразователя;
![]() —
угол поворота вала измерительного
преобразователя.
—
угол поворота вала измерительного
преобразователя.
Разрешающая способность измерительных преобразователей, связанных с валом исполнительного механизма, определяется как
![]() ,
,
где N – число меток измерительного преобразователя на один оборот его вала.
3. Электромеханические преобразователи
В САУ используются различные исполнительные устройства, предназначенные для выполнения необходимых технологических операций. В качестве исполнительных преобразователей могут использоваться устройства, такие как электрические машины, гидравлические и пневматические преобразователи, нагревательные и акустические приборы. В технологическом оборудовании, используемом в механообработке, наиболее часто используются электромеханические преобразователи, в качестве которых используются электрические машины. Наиболее часто применяются электродвигатели постоянного тока, асинхронные электродвигатели и синхронные электрические машины, работающие в режиме бесконтактного двигателя. Рассмотрим их основные характеристики, которые необходимы для их рассмотрения, как объектов теории автоматического управления.
3.1. Электродвигатель постоянного тока
Двигатель постоянного тока, как элемент САУ, описывается дифференциальными уравнениями якорной цепи и механической части двигателя:
|
(4) |
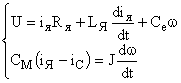 ,
,
где
![]() –
соответственно индуктивность и активное
сопротивление якорной цепи;
–
соответственно индуктивность и активное
сопротивление якорной цепи;
![]() —
соответственно ток якорной цепи и ток
нагрузки;
—
соответственно ток якорной цепи и ток
нагрузки;
![]() –
конструктивные постоянные двигателя;
–
конструктивные постоянные двигателя;
![]() –
момент инерции двигателя.
–
момент инерции двигателя.
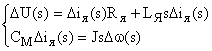
При изменении напряжения на входе
двигателя на некоторую величину
изменяются
ток двигателя
и
частота вращения двигателя
и,
пренебрегая обратной связью по противоЭДС
двигателя
![]() ,
получаем уравнения якорной цепи и
механической части двигателя в
приращениях:
,
получаем уравнения якорной цепи и
механической части двигателя в
приращениях:
|
(5) |

Преобразовывая уравнения (5) и, считая
![]() ,
переходим к операторной форме записи
данных уравнений:
,
переходим к операторной форме записи
данных уравнений:
|
(6) |
Из уравнений (6) получаем выражения для передаточных функций якорной цепи и механической части двигателя:
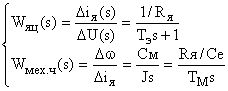
где
![]() –
электромагнитная постоянная двигателя,
–
электромагнитная постоянная двигателя,
![]() —
электромеханическая постоянная
двигателя.
—
электромеханическая постоянная
двигателя.
Согласно этой системе получаем, что развернутая структурная схема двигателя принимает вид, показанный на рис.1.
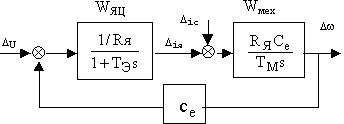
Рис. 1. Развернутая структурная схема двигателя
Свертывая развернутую схему, двигатель можно представить одним колебательным звеном (рис. 2):
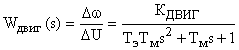 ,
,
где
![]() .
.
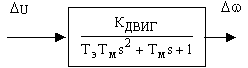
Рис. 2. Свернутая структурная схема двигателя