

Приклад слідкуючої системи стернового електроприводу
Н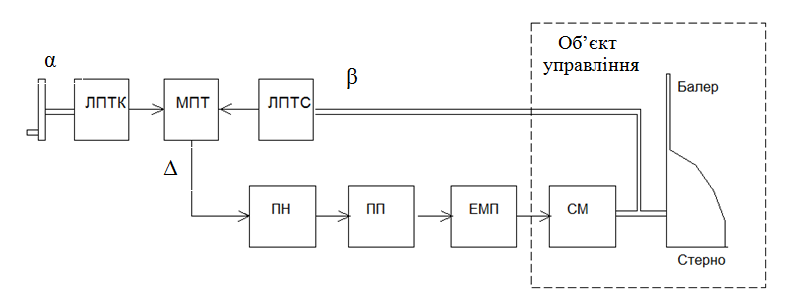 а
рисунку 1.4 представлена структурна
схема стернового електроприводу, яка
належить до класу слідкуючих систем,
оскільки у такій системі сигнал завдання,
який визначає положення стерна і отже
курс судна, задається повертанням
штурвалу на ходовому мостику.
а
рисунку 1.4 представлена структурна
схема стернового електроприводу, яка
належить до класу слідкуючих систем,
оскільки у такій системі сигнал завдання,
який визначає положення стерна і отже
курс судна, задається повертанням
штурвалу на ходовому мостику.
Рисунок 1.4 - Схема слідкуючого стернового електроприводу
В схемі застосовуються поворотні трансформатори (ПТ), які мають по дві взаємно перпендикулярні обмотки на статорі і роторі. Такі ПТ забезпечують лінійно зростаючий вихідний сигнал при повертанні ротору. Лінійний поворотний трансформатор курсу ЛПТК перетворює в електричний сигнал кут повороту α штурвалу, яки є елементом, що задає сигнал управління. Лінійний поворотний трансформатор стерна ЛПТС перетворює в електричний сигнал кут повороту балеру стерна β. Масштабний поворотний трансформатор МПТ утворює різницю Δ = α-β, яка складає сигнал нерівноваги. Цей сигнал підсилюється спочатку електронним підсилювачем напруги, потім магнітним підсилювачем і, нарешті, електромашинним підсилювачем великої потужності. Така ступенева схема підсилення обумовлена тим, що навантаження на стерно при маневрах судна може сягати десятків тонів.
Підсилений сигнал нерівноваги поступає на стернову машинку, що складається з двигуна та черв'ячного редуктора. Редуктор перетворює швидкі обертання двигуна у повільні обороти балеру стерна. Стерно повертається в напрямку зменшення нерівноваги до тих пір, поки сигнал нерівноваги Δ не стане рівним нулю. При цьому, очевидно, α = β і стерно займає потрібне положення, яке визначається положенням штурвалу. Двигун стернової машинки зупиняється і процес відробки завдання управління можна вважати закінченим.
В ідеалі двигун зупиняється при повній відсутності сигналу нерівноваги Δ. Але на практиці з-за наявності тертя зупинка відбувається дещо раніше. У момент зупинки існує сигнал нерівноваги ΔНР, який не рівний нулю, і отже α ≠ β. Якщо напругу зупинки та зрушення двигуна позначити UЗР, то UЗР = К ΔНР, де К – сумарний коефіцієнт підсилення ПН, ПП та ЕМП. Тому помилка відробки сигналу управління складає ΔНР = UЗР /К. Отже вона тим менше, чим більше підсилення К. Але підвищення коефіцієнту підсилення не може бути безграничним. Воно завжди обмежується міркуваннями стійкості систем. Майже всі системи автоматичного регулювання повинні мати значні коефіцієнти підсилення у замкненому контурі, тому підсилювачі є важливими елементами систем автоматичного управління. Також важливі і коректуючи елементи, що дозволяють забезпечити стійкість системи при великих підсиленнях (на схемі не показані). Безумовно, точність системи напряму залежить від похибки вимірювальних перетворювачів, роль яких виконують ЛПТК та ЛПТС, та обчислювача різниці (МПТ). Про відповідальну роль кріплення балеру стерна та правильної роботи стернової машинки, тобто виконавчих елементів, яки витримують значні механічні навантаження, вже було сказане.
Таким чином, розглянутий приклад простої системи підкреслює важливі ролі елементів п’яти різних типів. У складних системах значення окремих елементів та їх різноманітність зростають. Тому далі розглянуті визначення елементу автоматики та їх класифікація.