

3.1 Составление передаточных функции звеньев сау
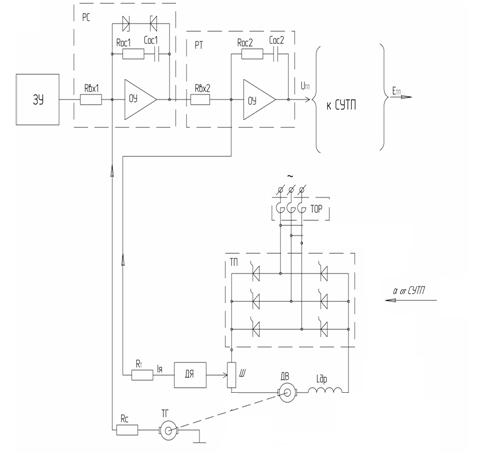
где: БО – блок ограничения выходного напряжения регулятора скорости;
ДР – дроссель сглаживания пульсаций;
ТОР – токоограничительный реактор;
ТГ – тахогенератор;
Структурная схема двухконтурной системы автоматического управления электрического двигателя постоянного тока

Рис5 . Структурная схема двухконтурной системы автоматического управления электрического двигателя постоянного тока
Построенная выше функциональная схема САУ дает возможность выделить отдельные динамические звенья САУ 1 – го и 2 – го порядка. Для каждого динамического звена необходимо составить его передаточную функцию (ПФ) и структурную схему.
ТП вместе с системой управления и фильтром для сглаживания пульсаций входных сигналов в первом приближении может быть представлен апериодическим звеном с ПФ:
Тиристорный преобразователь
Тиристорный преобразователь вместе с системой управления и фильтром для сглаживания пульсаций входных сигналов в первом приближении может быть представлен апериодическим звеном с передаточной функцией:
W
(р)=![]()
Коэффициент передачи К =51,3
Постоянная времени тиристорного преобразователя: Т =Т +
Т - постоянная времени фильтра, обычно (0,003…..0,005 с), выберу 0,005 с ;
- время запаздывания силовой части ТП
=![]()
=![]() =0,00167
[с]
=0,00167
[с]
Т =0,005+0,00167 = 0,00667 c
Двигатель
R =0,1514 Ом;
Т![]() =0,035
с;
=0,035
с;
К![]() =0,3687
=0,3687
![]() ;
;
Т![]() =0,86
c;
=0,86
c;
Датчик тока
Датчик тока при наличии фильтра на выходе следует считать апериодическим звеном с передаточной функцией:
W![]() (р)=
(р)=![]()
Т =(0,002…0,005) с (выберу 0,002 с)
К =0,03
Датчик скорости
Датчики скорости при наличии фильтра на выходе следует считать апериодическим звеном с передаточной функцией:
W![]() (р)=
(р)=![]()
Т![]() =(
0,01…0,02) с (выберу 0,02 с)
=(
0,01…0,02) с (выберу 0,02 с)
К![]() =0,0637
В·с
=0,0637
В·с
3.2 Построение структурной динамической схемы и синтез регуляторов.
В САР скорости контур тока чаще всего настраивается на оптимум по модулю(ОМ), а контур скорости- на симметричный оптимум (СО).
Параметры ПИ-регулятора скорости при настройке на симметричный оптимум выбирают по формулам:
![]() 1=
1=![]()
1=4Т![]()
К![]() =
=![]()
Суммарная
малая постоянная времени контура
скорости: Т
=Т
+2Т![]()
К
=![]() =0,1185
=0,1185
Т =Т +2Т
Т =Т +Т
Т =0,00667+0,002=0,00867 с
Т =0,02+2·0,00867=0,03734 с
1=![]() =97,179
=97,179
1=4·0,03734=0,14936 с
Параметры ПИ-регулятора тока определяются формулами:
2=![]()
2=Т![]()
К![]() =
=![]()
Суммарная малая постоянная времени контура тока: Т =Т +Т
К
=![]() =10,1651
=10,1651
Т =0,00667+0,002=0,00867 с
2=![]() =0,198
=0,198
2=0,035 с
3.3. Исследование системы на компьютере
Так как в SIAM не реализованы звенья типа пропорционально-интегрального, то данное звено представляется типовым соединением ,
К


 К- безинерционное звено
К- безинерционное звено
К/Р- интегрирующее звено
![]()




Поскольку:
W
=1·![]() =1·(1+
=1·(1+![]() )=1+
)=1+![]() =1+
=1+![]()
Согласно алгебре передаточных функций: при параллельных звеньях передаточные функции суммируются