

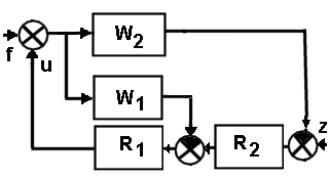
3. Системы регулирования по каскадной схеме
Системы
проектируются на основе структурной
схемы, изображенной на рисунке.
Регулятор![]() называется
стабилизирующим,
а регулятор
называется
стабилизирующим,
а регулятор
![]() - корректирующим.
Вид закона регулирования для регуляторов
и
и параметры их настройки можно
выбирать в соответствии с формулами,
указанными в таблице
- корректирующим.
Вид закона регулирования для регуляторов
и
и параметры их настройки можно
выбирать в соответствии с формулами,
указанными в таблице
Вид каскада |
Условия использования |
Стабилизирующий регулятор R1 |
Корректирующий регулятор R2 |
П-ПИ
|
|
|
|
ПИ-ПИ |
|
|
|
ПИ-ПИД |
|
|
|
В случае, например, каскада П-ПИ программа реализации регулятора имеет вид (предполагая, что настройки пересчитаны для цифровой реализации):
Период
дискретности можно выбрать в виде
![]() .
.
4. Системы многомерного управления. Общие сведения
В
случае синтеза оптимального цифрового
П-регулятора задача синтеза имеет вид:
дан объект управления
![]() ;
;
![]() ,
требуется задать настроечные положительно
определенные матрицы регулятора Q,R
и наблюдателя Q1,R1
(например, единичные), и найдя параметры
регулятора K,
наблюдателя L
и компенсатора Kz
,
требуется задать настроечные положительно
определенные матрицы регулятора Q,R
и наблюдателя Q1,R1
(например, единичные), и найдя параметры
регулятора K,
наблюдателя L
и компенсатора Kz
![]() ,
,
![]() ,
,
![]() ,
,
где
функция
![]() определена
в виде
определена
в виде

записать модель цифрового регулятора в виде
Если в результате моделирования переходной процесс получился неудовлетворительным, следует изменить настроечные матрицы и процедуру повторить снова.
Программа реализации регулятора имеет вид:
Возможен
вариант синтеза модального цифрового
П регулятора (чаще всего апериодического),
когда матрица К
выбирается из условия
![]() ,
а матрица L
из условия
,
а матрица L
из условия
![]() .
Возможен и комбинированный вариант,
например, когда синтезируется оптимальный
регулятор и апериодический наблюдатель
или наоборот.
.
Возможен и комбинированный вариант,
например, когда синтезируется оптимальный
регулятор и апериодический наблюдатель
или наоборот.
В случае синтеза оптимального цифрового ПИ-регулятора для объекта управления ; , требуется определить расширенные матрицы в виде

задать настроечные положительно определенные матрицы регулятора Q,R и наблюдателя Q1,R1 (например, единичные), и найдя параметры регулятора K и наблюдателя L
![]() ,
,
![]() ,
,
записать модель цифрового регулятора в виде

5. Синтез оптимального цифрового П-регулятора для одномерного типового объекта
Дан
объект вида
![]() или
или
![]() .
Переведя модель в дискретное время,
запишем
.
Переведя модель в дискретное время,
запишем
![]() ,
,
где
![]() ;
;
![]() для системы, эквивалентной
для системы, эквивалентной
![]() ;
;
![]() ;
;
![]() для системы, эквивалентной
для системы, эквивалентной
![]() .
.
С учетом запаздывания матрицы системы ; имеют вид

![]()
Приняв весовые матрицы Q , R в виде
 ;
;
![]()
получим,
что
![]() ,
где
,
где
![]() ,
,
 .
.
Матрицу
апериодического наблюдателя
 для
использования в регуляторе можно
найти в виде
для
использования в регуляторе можно
найти в виде
![]() ,
где
,
где
![]() .
.
6. Синтез системы управления для простейшего многомерного объекта
П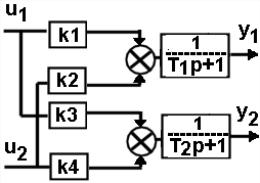 усть
модель объекта имеет вид
усть
модель объекта имеет вид

Переведем систему в дискретное время:
![]() ;
;
 ;
;
 ;
;
![]() ;
;
![]() .
.
Для упрощения решения выберем теперь весовую матрицу
таким
образом, чтобы произведение
![]() стало
диагональной матрицей. Тогда, выбрав
стало
диагональной матрицей. Тогда, выбрав
![]() и
и
![]() ,
найдем
,
найдем
 ,
,
 .
.
Теперь, поскольку все матрицы, входящие в уравнение Риккати в LQ(.), диагональны, матрица Р тоже диагональна и нахождение ее диагональных элементов сводится к решению двух независимых квадратных уравнений. Решение существует, если уравнения содержат положительные корни. Настройка качества переходных процессов производится выбором диагональной матрицы Q.