

Міністерство освіти та науки України
Національний університет харчових технологій
Кафедра інформаційних систем
Курсова робота на тему:
«ДОСЛІДЖЕННЯ ХАРАКТЕРИСТИК ОБ’ЄКТА КЕРУВАННЯ
ЗАСОБАМИ КОМП’ЮТЕРНОЇ ТЕХНІКИ»
З дисципліни «Комп’ютерні технології та програмування»
Виконав:
Студент 1-го курсу факультету АКС
Напрям: «Автоматизація та
комп’ютерно-інтегровані
технології»
Марушкевич Євгеній
Керівник курсової роботи:
Ліманська Н.В.
Київ 2012
НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ ХАРЧОВИХ ТЕХНОЛОГІЙ
Кафедра інформаційних систем
Дисципліна: «Комп’ютерні технології та програмування»
Напрям: 6.050101 « Автоматизація та комп’ютерно-інтегровані технології»
Курс: 1 Група: 1 Семестр 2
ЗАВДАННЯ
на курсову роботу студента
Марушкевича Є.М.
Тема роботи: «Дослідження характеристик об’єкта
керування засобами комп’ютерної техніки»
Строк здачі студентом закінченої роботи _____________
Вихідні дані до роботи
1) структурна схема об’єкта керування;
2) обмеження на вихідні параметри;
3) функції ланок;;
4) функція збурення;
4. Зміст розрахунково-пояснювальної записки( перелік питань, які
підлягають розробці)
1) математична постановка задачі;
2) схема та опис алгоритму розв’язання задачі;
3) програма мовою Паскаль;
4) аналіз результатів;
5. Перелік графічного матеріалу( з точним значенням обов’язкових
креслень)
1) схема алгоритмів;
2) графіки функцій збурення та мінімуму передаточної функції;
6. Дата видачі завдання :___________
Календарний план
№ |
Назва етапів курсової роботи |
Строк виконання етапів курсової роботи |
Примітки |
1 |
Математична постановка задачі |
|
|
2 |
Складання схеми алгоритму розв’язання задачі |
|
|
3 |
Написання програми мовою Турбо Паскаль |
|
|
4 |
Відлагодження програми |
|
|
5 |
Аналіз результатів і висновки |
|
|
6 |
Оформлення роботи |
|
|
Студент____________
(підпис)
Керівник____________ ______________________
(підпис) (прізвище, ім’я, по батькові)
“ “ _________ _______
Зміст
Вступ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1. Вихідні дані до курсової роботи . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2. Математична постановка задачі . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3. Схема та опис алгоритму розв’язання задачі . . . . . . . . . . . . . . . . . . . . . . . . . 8
4. Опис змінних . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
5. Результати реалізації на ПК…………………………………………….......13
6. Перелік графічного матеріалу . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
7. Аналіз отриманих результатів . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 16
8. Список використаної літератури . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 Додатки. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . 18
Вступ
Одним із найважливіших напрямків автоматизації є системи автоматичного управління. Адже дуже важливо, щоб будь-яка система завжди була в стабільному стані.
Системи автоматичного управління здатні підтримувати постійне значення деякого критерію, який характеризує якість функціонування даного об’єкту. Критерієм якості, який зазвичай називають цільовою функцією, показником екстремуму або екстремальною характеристикою, може бути температура, вологість, струм, напруга і т.д. Зрозуміти принцип роботи таких систем дуже просто на прикладі систем кондиціонування, автоматичного пожежогасіння, навігаційних систем, системи автопілотування і т.д.
В даному курсовому проекті розроблюється модель дослідження характеристик об’єкта керування. Дана модель має досить поширене вживання, оскільки вона досить проста у виконанні, тому і надійна, а також дуже гнучка у використанні,тому може бути використана в будь-якому об’єкті управління.
1.Вихідні дані до курсової роботи
1.1 Структурна схема об’єкта керування
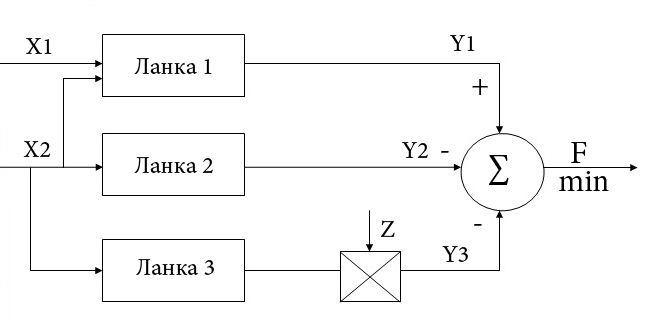
Рис.1 Структурна схема об’єкта керування
Х1, Х2-вхідні імпульси;
Y1, Y2,Y3- ланкові функції;
Z-функція збурення;
F-передаточна функція.
Ланкові функції:
Y1=X1-X2+3X1*X2;
Y2=sin (X2);
Y3=X23-Z;
Функція збурення:
Z=(1/t2)-1;
Передаточна функція:
F=Y1+(-Y2)-Y3= X1-X2+3X1*X2+(- sin (X2))- X23-Z;
Обмеження на вихідні параметри:
3≤X1≤6;
-1≤X2≤2
t Є [1;2.6];
2.Математична постановка задачі
Завданням даної курсової роботи є дослідження обь’єкта керування, структура об’єкта відображено на рисунку 1.
Обьєкт складається з 3-х ланок, на входи яких надходять імпульси X1 та X2, на виході кожної ланки отримаємо 3 функції Y1,Y2,Y3. F(передаточна функція)-сума вищезгаданих функцій.
F= F=Y1+(-Y2)-Y3= X1-X2+3X1*X2+(- sin (X2))- X23-Z;
Де Z=(1/t2)-1.
Для дослідження використовується метод перебору, котрий працює наступним чином:
Спочатку формується матриця F(10x10), в передаточну функцію підставляється перше значення фунціїіі збурення
З першого рядку матриці F(10x10) береться перше значення X1 і всі значення X2; у другому рядку друге значення X1 і всі значення X2 і т.д.
Далі в матриці визначається мінімальне значення і відповідні значення X1 та X2, при яки і досягається мінімум.
В наступну матрицю підставляється друге значення функції збурення Z і вищезгаданий алгоритм повторюється.