

13.Формування узагальненого критерыю ефективності
Ситуації
прийнять рішень суттєво відрізняються
ступінню точності та однозначності,
визначення переваг ОПР. 1. Вагові
коеф.невідомі.2. вагові коеф існують,
але є переваги на мн. Часткових критеріїв.3.
вагові коеф відомі.
3. Якщо ВК відомі,
можна використовувати одну з моделей
ПР. 1 якщо ВК не відомі доцільно вик.
Максимільні або мінімаксні схеми. X0=arg
maxmin
Qi(x)
x0=arg
minmax
Qi(x).
Q͠i(x)=1-Qi(x).
2ВК
невідомі, але існують переваги. Це робить
раціональним застосування схеми
лексикографічної оптимізації. Критерії:
1)якщо Q(x)>Q(y)
2)Q1(x)=Q1(y)…
4)
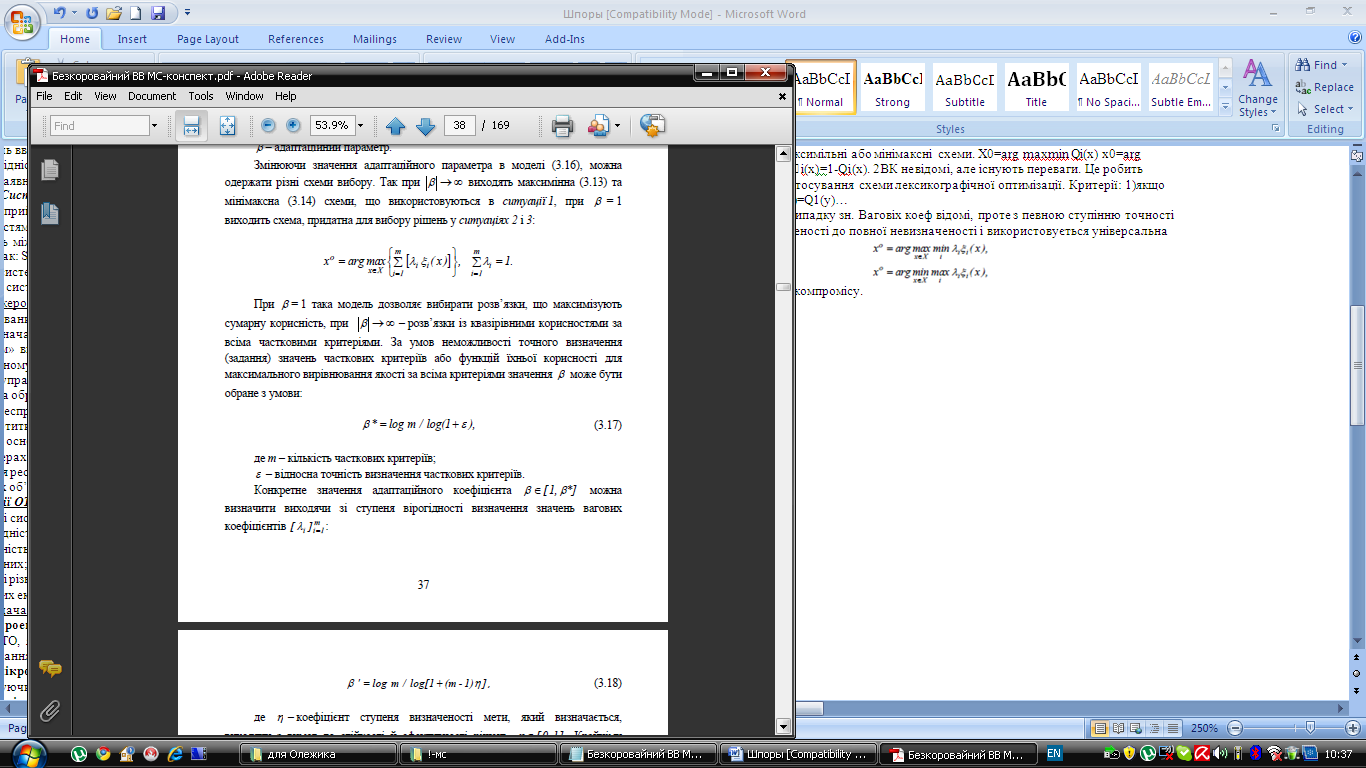
У загальному випадку зн. Ваговіх коеф
відомі, проте з певною ступінню точності
від повної визначеності до повної
невизначеності і використовується
універсальна адаптивна схема компромісу.
![]()
![]()
14. основні
підходи до МС.
Виділяють класичний
(перехід від часткового до загального),
системний (перехід від загольного до
часткового), структурний(встановлння
структурних власт.обєкта) та
функціональний(визначення взаємодії
та реалізації ф-й в середині обєкта).
Модель обєкта подається у вигляді
сукупності велечин: мн.вхідних сигналів
xiєX,
i=1,nX
мн.впливів зовнішнього середовища.,
viєV,
i=1,nV,
мно.внутрішніх параметрів hiєH,
i=,
мн.вхідних сигналів yiєY,
i=1,nY.
При чому х,
v,
h
– окзогенні, а у – ендогенна змінна.
Процес ф-ння обєкта у часі можна подати
![]()

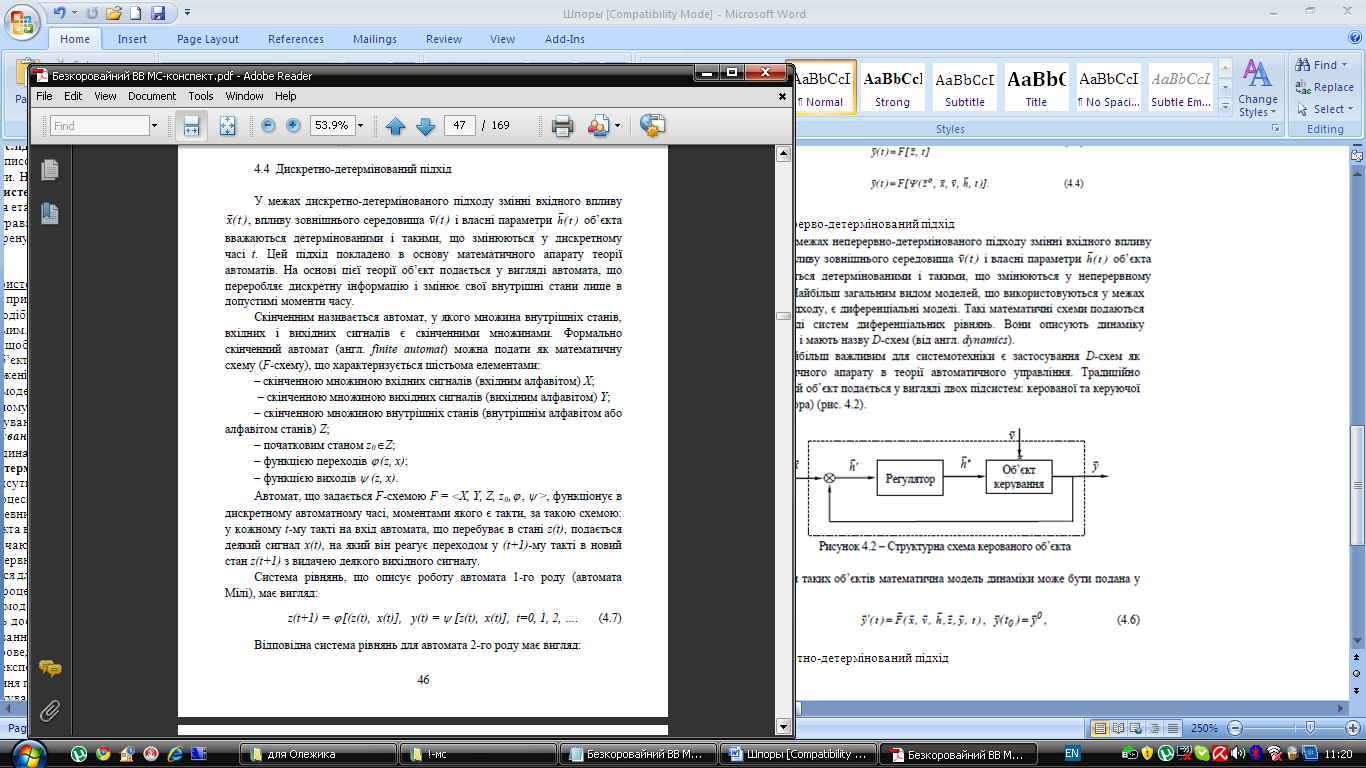
15. Неперерво-детермінований підхід
![]()
![]()
17
дискретно-стохастичний

17.неперервно-стохастичний
У рамках
НСП обєкти подаються у вигляді Q-схем
– системи з чергами.
Q-схема
скл. З обслуговуючих приладів.
![]()
 18.
Мережеві моделі
18.
Мережеві моделі
![]()
 9.
Прийняття рішень за результатами
моделювання
9.
Прийняття рішень за результатами
моделювання
Задачі прийняття рішень традиційно формалізуються в термінах «умови –
мета». При цьому «умови» розглядаються як множина станів об’єкта й
операторів, що переводять його з одного стану в інший, а «мета» – як бажаний
стан об’єкта. Частіше за все зміна умов здійснюється за алгоритмами методів оптимізації. Така задача не викликає труднощів у випадку одного показника ефективності. Задача полягає у виборі альтернативи xϵХ, що призводить до деякого наслідку uϵU. Основними класами задач прийняття рішень є: – задача в умовах визначеності, де кожному альтернативному варіанту Х однозначно відповідає U з його характеристиками; – задача в умовах ризику; – задача в умовах невизначеності .Серед задач прийняття рішень виділяють такі, що розв’язуються у рамках ординастичних та кардиналі стичних. В рамках ординалістичного підходу встановлюеться порядок альтернатив. У рамках карданалістичного – кількісна оцінка корисності.
19.
Універсальний підхід

![]()

![]()

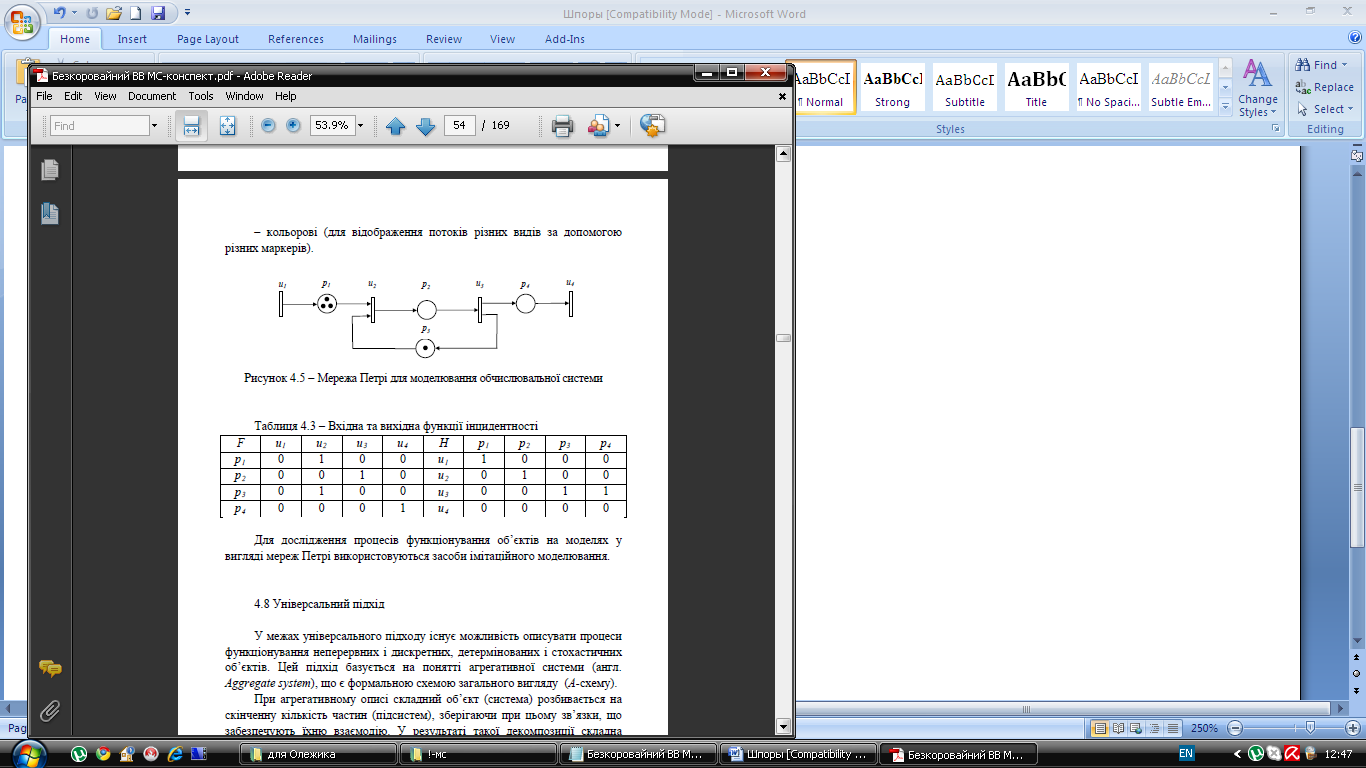
16.
Дикретно-детермінований підхід
![]()
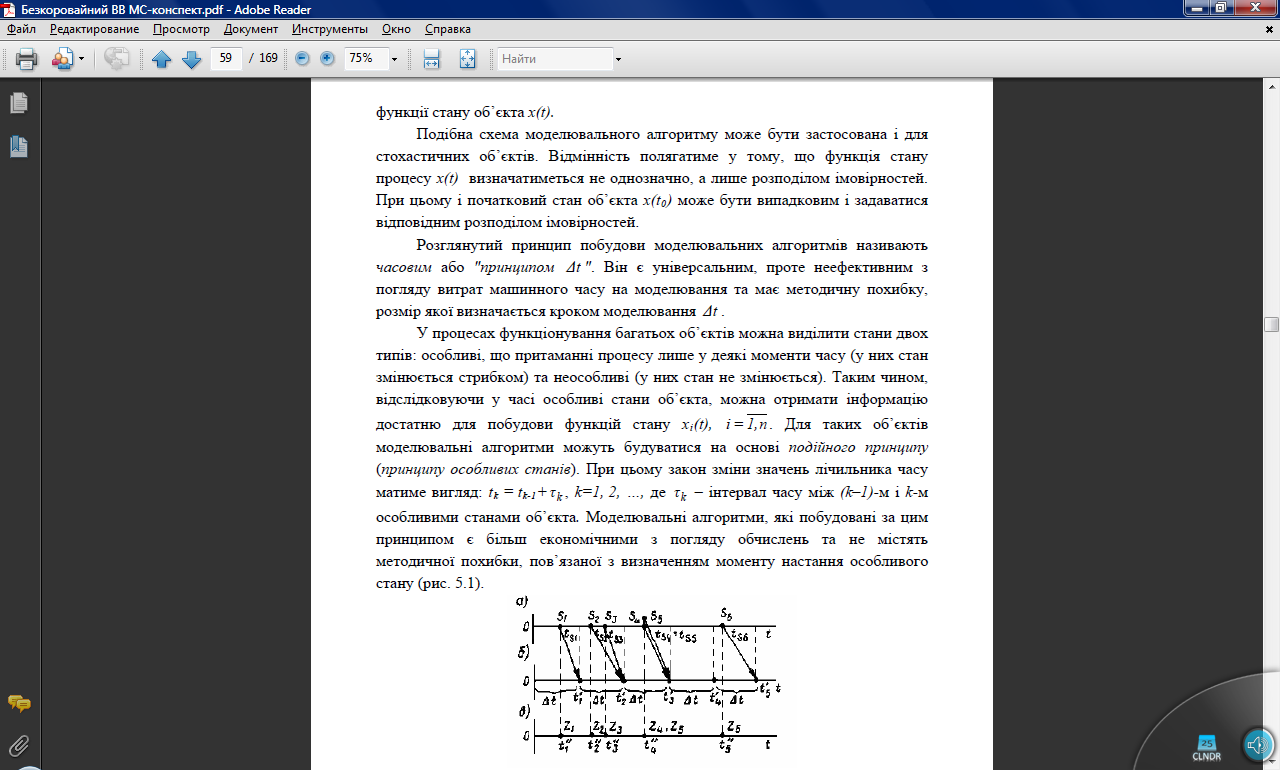
1. Принципи побудови моделювальних алгоритмів
2. Форми подання моделювальних алгоритмів
3. Метод статистичного моделювання
4. Способи генерації випадкових чисел
5. Процедури генерації випадкових чисел
![]()
![]()
6. Імітація випадкових подій
![]()
![]()
7. Генерація випадкових величин із заданим законом розподілу
![]()
![]()
![]()
8. Особливості фіксації результатів статистичного моделювання
9. Оцінка точності результатів статистичного моделювання
![]()
![]()
10. Диференціальні моделі керованих об’єктів
![]()
![]()
![]()
![]()
11. Приклади моделей динаміки керованих об’єктів
![]() 12.
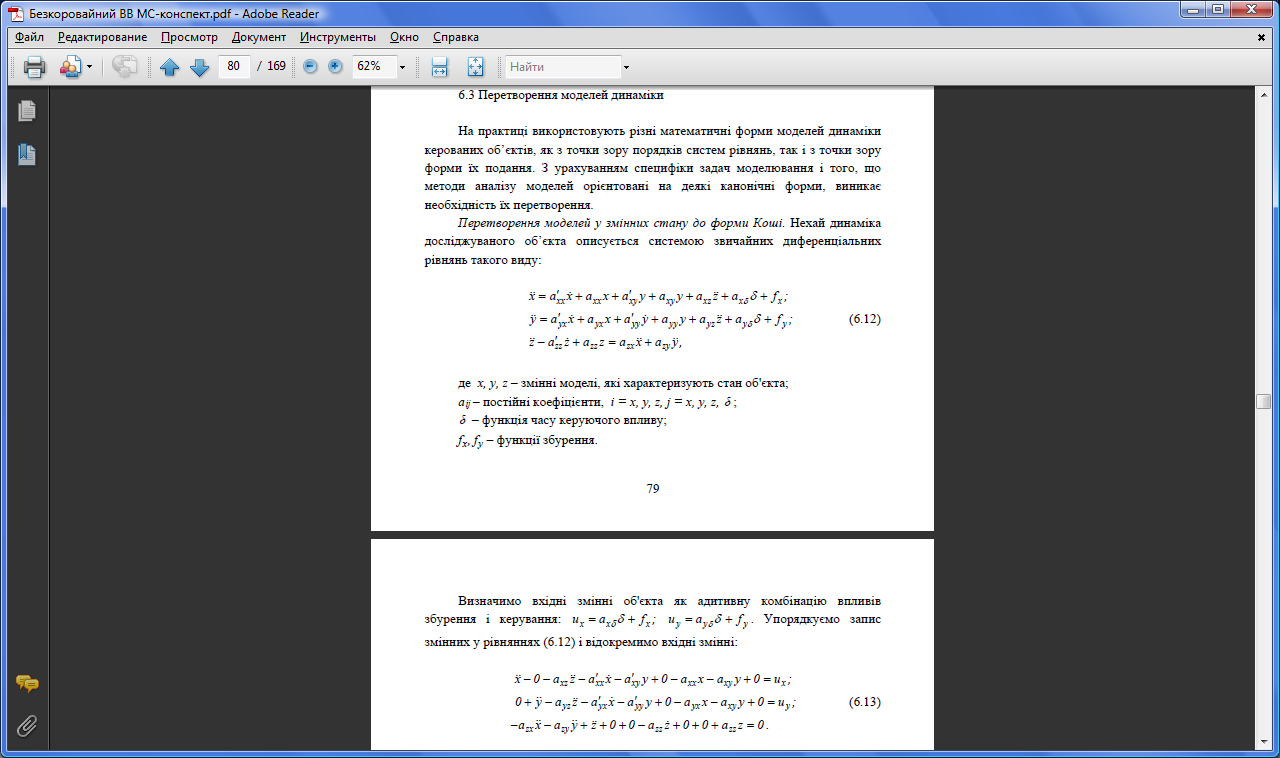
Перетворення моделей динаміки
12.
Перетворення моделей динаміки
![]()
![]()
![]()
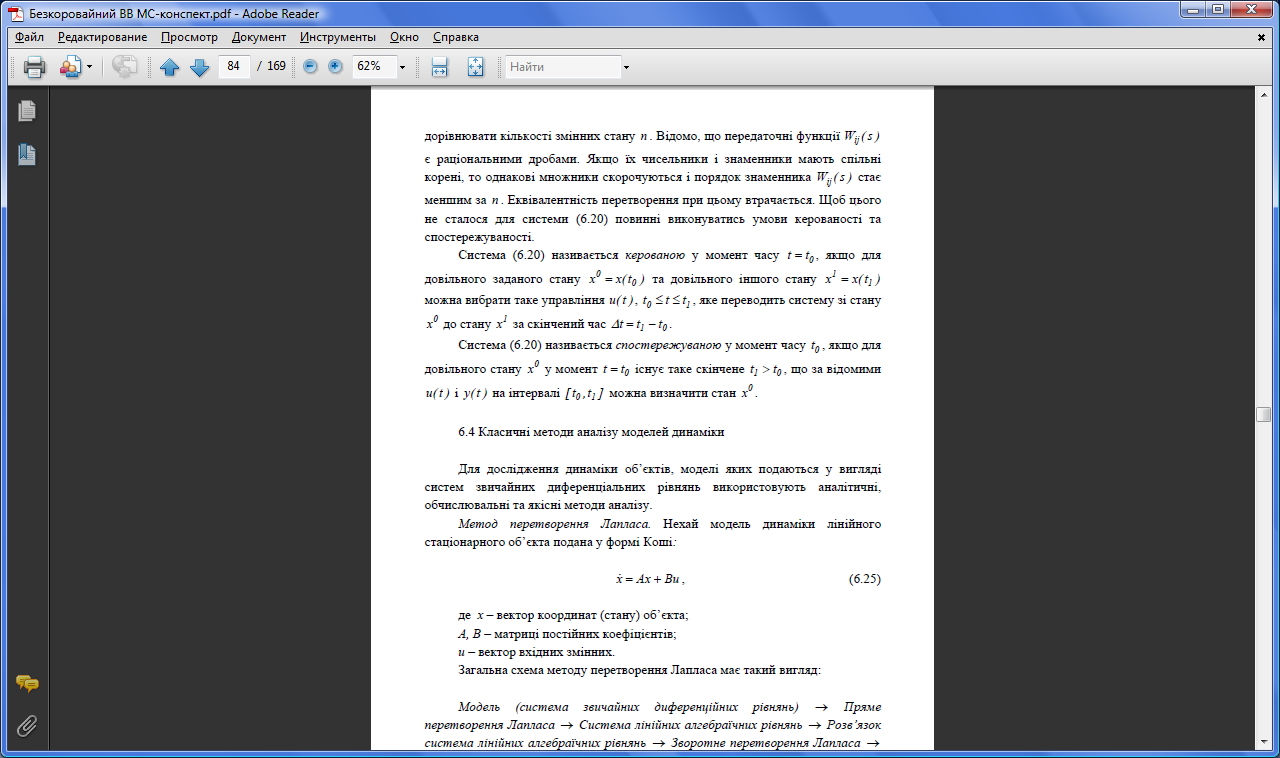
13. Класичні
методи аналізу моделей
динаміки
![]()
![]()
![]()
![]()
14. Спеціальні методи аналізу динамки об'єктів
і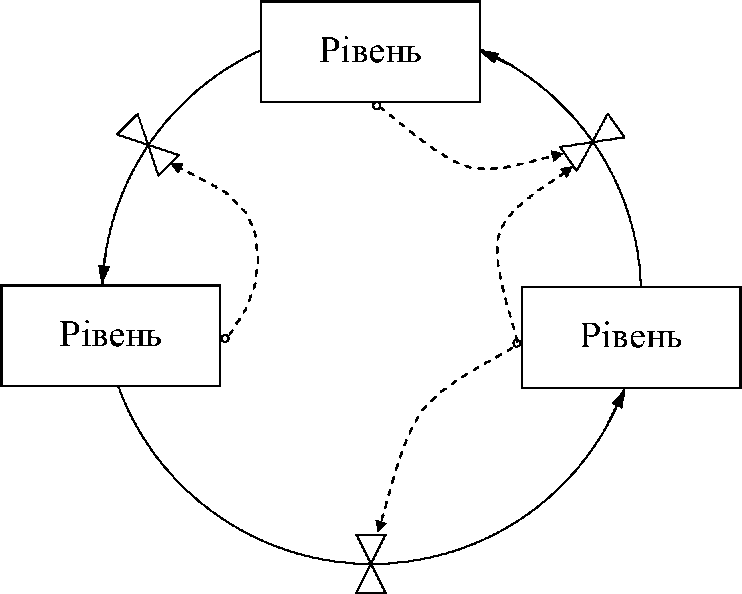 снують
задачі, для розв'язання яких виникає
необхідність розробки і спеціальних
методів аналізу, до яких, зокрема
відносять якісні, комбіновані та
діакоптичні методи. Якісні
методи
орієнтовані на отримання не самого
розв'язку, а на визначення його
властивостей. Такі задачі виникають
при
проектуванні об'єктів і систем керування
ними.
Модель
динаміки лінійного стаціонарного
об'єкта
визначає
траєкторію його вимушеного руху. Рух
об'єкта в умовах відсутності вхідного
впливу
(Bu
= 0)
називають вільним. Його динаміку можна
подати моделлю виду:х
=Ах,х(0)=
x(t0)(6.34)
де
х
-
вектор
координат (стану) об'єкта;
А
-
матриця
постійних коефіцієнтів розмірності
n
х
n,
що
характеризує властивості об'єкта.
Позначимо
через
Х(і/>
власний вектор матриці
А,
який відповідає власному значенню
Ai,
i
= 1,n.
Тоді
розв'язок системи рівнянь (6.34)
можна
подати як суму окремих фундаментальних
розв'язків:
снують
задачі, для розв'язання яких виникає
необхідність розробки і спеціальних
методів аналізу, до яких, зокрема
відносять якісні, комбіновані та
діакоптичні методи. Якісні
методи
орієнтовані на отримання не самого
розв'язку, а на визначення його
властивостей. Такі задачі виникають
при
проектуванні об'єктів і систем керування
ними.
Модель
динаміки лінійного стаціонарного
об'єкта
визначає
траєкторію його вимушеного руху. Рух
об'єкта в умовах відсутності вхідного
впливу
(Bu
= 0)
називають вільним. Його динаміку можна
подати моделлю виду:х
=Ах,х(0)=
x(t0)(6.34)
де
х
-
вектор
координат (стану) об'єкта;
А
-
матриця
постійних коефіцієнтів розмірності
n
х
n,
що
характеризує властивості об'єкта.
Позначимо
через
Х(і/>
власний вектор матриці
А,
який відповідає власному значенню
Ai,
i
= 1,n.
Тоді
розв'язок системи рівнянь (6.34)
можна
подати як суму окремих фундаментальних
розв'язків:
![]() де
Сі
-
постійна,
що визначається початковими умовами в
обраному базисі.
Характер
траєкторії руху об'єкта повністю
визначається власними значеннями
матриці
А.
Власні значення
А1}
А2,...,
An
є
коренями характеристичного рівняння:
де
E
-
одинична
матриця.
Власні
вектори
Х()1,
Х(2)...
X(n)матриці
А
є розв'язками систем лінійних алгебраїчних
рівнянь, що мають вигляд
(A-AiE)
Х(і)
=
0, і
=
1, 2,., nі
визначаються з точністю до постійного
множника.
Для
дійсних власних значень
At
функції
фундаментальних розв'язків
будуть монотонними (зростаючими для
позитивних
At
і
спадними для негативних
Xi).
Для
комплексних власних значень
Ai
функції
фундаментальних
розв'язків
будуть
коливними
де
Сі
-
постійна,
що визначається початковими умовами в
обраному базисі.
Характер
траєкторії руху об'єкта повністю
визначається власними значеннями
матриці
А.
Власні значення
А1}
А2,...,
An
є
коренями характеристичного рівняння:
де
E
-
одинична
матриця.
Власні
вектори
Х()1,
Х(2)...
X(n)матриці
А
є розв'язками систем лінійних алгебраїчних
рівнянь, що мають вигляд
(A-AiE)
Х(і)
=
0, і
=
1, 2,., nі
визначаються з точністю до постійного
множника.
Для
дійсних власних значень
At
функції
фундаментальних розв'язків
будуть монотонними (зростаючими для
позитивних
At
і
спадними для негативних
Xi).
Для
комплексних власних значень
Ai
функції
фундаментальних
розв'язків
будуть
коливними
![]() (зростаючими
для позитивних і затухаючими для
негативних
Ai).
Комбіновані
методи
передбачають використання різних
методів або адаптацію базових методів
інтегрування з метою отримання максимально
точних (задовільних) результатів з
мінімальними (задовільними) витратами
обчислювальних ресурсів. Розрізняють
комбінування "у просторі" (розбиття
системи рівнянь моделі на підсистеми
з подальшим роздільним їх розв'язанням
найбільш ефективними методами) та "у
часі" (використання різних методів
інтегрування на різних етапах розв'язання
системи рівнянь). Діакоптичні
методи
передбачають розбиття складного
досліджуваного об'єкта на підсистеми
з урахуванням зв'язків між ними. Після
цього здійснюється послідовне чи
паралельне розв'язання задач меншої
розмірності. Нехай підчас аналізу
динаміки об'єкта методом перетворення
Лапласа необхідно розв'язати систему
лінійних алгебраїчних рівнянь виду: Ах
=
в,
де
А -
квадратна матриця розмірністю
n
х
n;
х
- шукана змінна; в
-
вектор коефіцієнтів.
Подамо
матрицю
А
як таку, що складається з чотирьох
матриць:
(зростаючими
для позитивних і затухаючими для
негативних
Ai).
Комбіновані
методи
передбачають використання різних
методів або адаптацію базових методів
інтегрування з метою отримання максимально
точних (задовільних) результатів з
мінімальними (задовільними) витратами
обчислювальних ресурсів. Розрізняють
комбінування "у просторі" (розбиття
системи рівнянь моделі на підсистеми
з подальшим роздільним їх розв'язанням
найбільш ефективними методами) та "у
часі" (використання різних методів
інтегрування на різних етапах розв'язання
системи рівнянь). Діакоптичні
методи
передбачають розбиття складного
досліджуваного об'єкта на підсистеми
з урахуванням зв'язків між ними. Після
цього здійснюється послідовне чи
паралельне розв'язання задач меншої
розмірності. Нехай підчас аналізу
динаміки об'єкта методом перетворення
Лапласа необхідно розв'язати систему
лінійних алгебраїчних рівнянь виду: Ах
=
в,
де
А -
квадратна матриця розмірністю
n
х
n;
х
- шукана змінна; в
-
вектор коефіцієнтів.
Подамо
матрицю
А
як таку, що складається з чотирьох
матриць:
![]() а
вектори, як такі, що складаються з двох
векторів кожний
а
вектори, як такі, що складаються з двох
векторів кожний
![]() Тоді
систему (6.36) можна переписати у вигляді
Тоді
систему (6.36) можна переписати у вигляді
![]() Перше матричне рівняння
розвяжемо відносно Х],
матимемо:
Підставимо
отриманий вираз (6.38) у друге рівняння:
Отримаємо:
Перше матричне рівняння
розвяжемо відносно Х],
матимемо:
Підставимо
отриманий вираз (6.38) у друге рівняння:
Отримаємо:
15. Принципи побудови та структура імітаційних моделей динаміки. Побудові імітаційної моделі передує виявлення питань, на які вона повинна дати відповіді. Модель повинна відображати замкнений контур, характерний для структури керованого об'єкта. У моделі керованого об'єкта повинні бути коректно подані усі суттєві запізнення, підсилення і спотворення інформації, які мають місце у процесі його функціонування. Запізнення характерні для всіх процесів, що мають місце у об'єктах дослідження, вони відображають їх тривалість. Вони проявляються у формі залишків, запасів, накопичень. Підсилення виникають як результат застосування певних правил прийняття рішень, які визначають темпи потоків, і проявляються, зазвичай, як реакції більшої сили, ніж було б необхідно. Спотворення інформації може виникати не тільки в результаті запізнень і підсилень, які мають місце в процесі функціонування об'єкта, але й при обробці даних. Вони також можуть бути наслідком помилок, випадкових шумів, а також невиявлених збурень, джерела яких знаходяться поза об'єктом. Спочатку потоки і взаємодії змінних доцільно вважати неперервними. Неперервність слід розуміти, в першу чергу, як неперервність реакцій управління. Дискретність може бути врахована на етапі аналізу керованого об'єкта. Усі параметри і змінні моделі можуть і повинні бути відображеннями відповідних величин і категорій об'єкта моделювання. Розмірність величин у моделі повинна бути ретельно погодженою. Починати потрібно з побудови моделі з детермінованою структурою рішень, а потім включати в неї елементи випадковості й періодичні коливання. При побудові моделі не слід припускати, що система є лінійною й стійкою. В інформаційній системі зі зворотним зв'язком ті або інші явища породжують інформацію, що є основою для рішень, що управляють діями, спрямованими на зміну цих явищ. Такий цикл є безперервним. Імітаційна модель динаміки об'єкта повинна мати форму, що дозволяє вирішувати одночасно кілька завдань. У зв'язку із цим вона повинна мати такі характерні риси: -мати можливість відображати будь-який причинно-наслідковий зв'язок, який дослідник хоче врахувати; -мати просту математичну форму; -використати термінологію, синонімічну мові предметної галузі об'єкта дослідження; -охоплювати велику кількість змінних, не перевищуючи практичних можливостей ЕОМ; -бути придатною для відбиття "безперервних" взаємодій, для того, щоб дискретні величини, що вводяться на інтервалі часу між рішеннями, не мали суттєвого впливу на результати, однак модель повинна дозволяти проводити дискретні зміни в рішеннях. Зазначеним вище вимогам задовольняє динамічна структура, що складається з рівнів (ємностей, резервуарів), зв'язаних між собою керованими потоками. Така структура містить чотири елементи (рис. 6.1): множину рівнів; потоки, що переміщають уміст одного рівня до іншого; функції рішень (зображувані у вигляді вентилів), які регулюють темпи потоків між рівнями; канали інформації (зображувані у вигляді пунктирних стрілок), що з'єднують функції рішень із рівнями. Рівні характеризують накопичення, які виникають усередині системи (товари, наявні на складі, банківська готівка, виробничі площі, ресурси робочої сили). Рівні являють собою ті значення змінних у цей момент, які вони мають у результаті нагромадження через різницю між вхідними і вихідними потоками. Темпи визначають існуючі миттєві потоки між рівнями в системі. Темп відображає активність, у той час як рівні вимірюють стан, що є результатом активності в системі. Темпи так само, як і рівні, існують у всіх мережах системи. Темпи потоку встановлюються на основі рівнів відповідно до законів, які визначають вид функції рішень. У свою чергу темпи визначають рівні.
Функції рішень (рівняння темпів) являють собою формулювання лінії поводження, що відображає розподіл ресурсів і визначає, яким чином наявна інформація про рівні приводить до вибору рішень, пов'язаних з величинами поточних темпів. Усі рішення стосуються майбутніх дій і виражаються у формі темпів потоку. Функція рішення може мати форму нескладного рівняння, що визначає найпростішу реакцію потоку на стан одного або двох рівнів.
Інформація є основою для прийняття рішень. Функції рішень для визначення темпів потоків пов'язані лише з інформацією щодо рівнів і вважаються незалежними у той же момент часу від інших темпів потоків.
У загальному випадку процес функціонування об'єкта подається сукупністю різнорідних взаємодіючих між собою мереж потоків матеріалів, замовлень, фінансів, робочої сили, обладнання, інформації. Мережа інформації є об'єднуючою для всіх інших мереж. Вона бере "початок" від рівнів і темпів інших мереж і "закінчується" біля функцій рішень, що визначають темпи потоків у інших мережах.
 1
1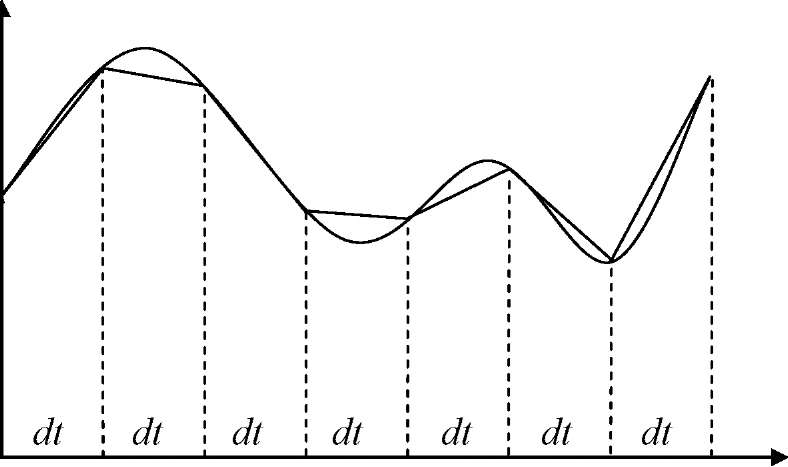
![]() 6.
Системи рівнянь імітаційних моделей
динаміки
Для опису базової структури
імітаційних моделей динаміки необхідна
система рівнянь, що задовольняла б
перерахованим вище вимогам і дозволяла
б визначати поточні значення для рівнів
і темпів потоків. Така система рівнянь
повинна відповідати взаємодії елементів
об'єкта, а її розв'язки -
станам
об'єкта для визначених моментів часу.
Інтервал
моделювання розбивається на відрізки
рівної величини
dt.
При
цьому виділяються три послідовних
моменти часу:
j
-
попередній,
к
- теперішній;
l
-
майбутній.
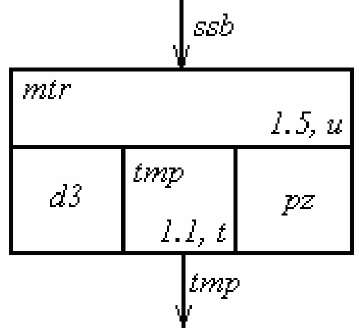
Відрізки часу
dt
повинні бути достатньо малими, щоб темпи
потоків усередині них можна було вважати
постійними, отримавши достатнє наближення
до неперервних темпів потоків реального
об'єкта (рис. 6.2). Таким чином, на рішення,
прийняті на початку інтервалу, не будуть
впливати зміни, що матимуть місце на
цьому інтервалі.
Імітаційні
моделі динаміки (за Дж.Форрестером)
включають рівняння: рівнів; темпів
потоків; допоміжні; додаткові; початкових
умов. Для кожного з інтервалів спочатку
розв'язуються рівняння рівнів, а потім
отримані значення використовуються у
рівняннях темпів. Значення рівнів у
момент часу
к
обчислюються
на кінець інтервалу
jk,
а
по ним визначаються нові темпи потоків
(рішення) для наступного інтервалу
kl
(рис.
6.3).
Рівняння
рівнів визначають рівні у момент часу
к,
виходячи із значень рівнів у момент
j
і
темпів потоків на інтервалі
jk.
Отримані
значення рівнів будуть визначати темпи
потоків протягом наступного інтервалу
kl.
Постійність
темпів
у межах
dt
забезпечує
постійну швидкість зміни рівнів на
відрізку
jk.
Для
позначення змінних у рівняннях моделі
рекомендується використовувати символи,
що відображають фізичну суть показників
досліджуваного об'єкта. Відповідність
значень змінних моментам і відрізкам
часу встановлюється за допомогою
розширень їх ідентифікаторів:
.j;
.k;
. l;
.jk;
. kl
Рывень
Кусочно-лінійна
апроксимація змін рівня.
Рівняння
рівнів(U-рівняння).
Рівень являє собою змінний за величиною
вміст ємності.
Значення
рівнів визначається на початку і в кінці
кожного із інтервалів. Вважається, що
в серединіінтервалів значення рівня
змінюється лінійно. Прикладом типового
рівняння рівня може бути: zr.k
= zr.j
+ dt
* (in.jk
- out.jk),
zr.k,
zr.j
- значення рівня у моменти часу
к
і
j
відповідно; dt
-
крок моделювання;in.jk,
out.jk
-
відповідно темпи вхідного і вихідного
потоків на інтервалі
jk.
До
початку розв'язання рівняння рівня
значення всіх змінних і параметрів
повинні бути визначеними. Рівняння
рівнів є незалежними одне від одного і
можуть розв'язуватись у будь-якому
порядку.
Рівняння
темпів (Т-рівняння)
визначають темпи потоків між рівнями
у системі. Рівняння рівня розв'язуються
на основі даних щодо існуючих на поточний
час величинах рівнів (наприклад, від
якого і до якого направлений потік).
Т-рівняння
регулюють дії, які повинні відбутися
на наступному інтервалі часу. Прикладом
рівняння темпу може бути рівняння
запізнення вихідного потоку
out
на відрізку
kl,
що має вигляд показникової функції
першого порядку: out.kl
= zr.k
/ pz,
де zr.k
- значення рівня у момент часу
k;
pz
-
постійна запізнення. Рівняння темпів
розв'язуються після розв'язання рівнянь
рівнів у довільній послідовності
незалежно одне від одного. Допоміжні
рівняння (V-рівняння).
Якщо рівняння темпів виявляються
складними, то їх можна розбивати на
частини, які називають допоміжними
рівняннями.
V-рівняння
є проміжними. Вони розв'язуються на
момент часу
k
після
розв'язання [У-рівнянь, але до розв'язання
Т-рівнянь
та у строго визначеній послідовності.
Система
V-рівнянь
не повинна бути замкненою. Замкненість
системи
V-рівнянь
є показником її некоректності. Додаткові
рівняння (D-рівняння)
використовуються для отримання додаткової
інформації щодо об'єкта дослідження,
яка не передбачена постановкою задачі
моделювання. Такі рівняння можуть бути
корисними, наприклад, на етапі налагодження
моделі чи програми моделювання. По своїй
суті
D-рівняння
є рівняннями рівнів чи темпів. Рівняння
початкових умов (N-рівняння)
використовуються для визначення
початкових значень всіх рівнів і темпів,
які повинні бути відомими до першого
циклу розв'язання рівнянь. Вони також
використовуються для обчислення значень
одних постійних (параметрів) через
значення інших.
N-рівняння
розв'язуються
один раз перед глобальним циклом
моделювального алгоритму.
Довжина
інтервалу (кроку моделювання)
dt
вибирається на основі компромісу між
необхідною точністю розв'язку і часом
реалізації моделювального алгоритму:
-так
як рівні визначають темпи потоків, а
темпи визначають рівні, то інтервал
повинен бути достатньо коротким, щоб
зміни в рівнях між моментами розв'язання
рівнянь не приводили
до
неприпустимої дискретності темпів
потоків;
-інтервал
dt
повинен
бути достатньо коротким, щоб темпи
потоків не викликали великих змін рівнів
за один інтервал розв'язку;
-інтервал
dt
повинен
бути меншим 1/2
будь-якого
показникового запізнення першого
порядку, 1/4
запізнення
другого порядку, 1/6
запізнення
третього порядку і так далі;
інтервал
повинен бути суттєво меншим самого
короткого періоду коливань компонентів
досліджуваного об'єкта.
Правильність
вибору кроку
dt
перевіряється
шляхом його варіювання і оцінкою його
впливу на результати обчислень.
17.
Символи
в діаграмах потоків
Основни
елементи діаграм потоків є символи для
відображення: рівнів; потоків; функцій
рішень; джерел та кінцевих пунктів;
точок відбору інформації; допоміжних
змінних; параметрів; змінних на інших
діаграмах; запізнень.Рівні
подаються як прямокутники, у лівому
верхньому куті якого наводиться
ідентифікатор змінної
zr,
що характеризує рівень, у правому
нижньому куті - номер рівняння, що
визначає значення змінної рівня. Вхідний
і вихідний потоки рівня позначаються
направленими лініями з позначенням
ідентифікаторів відповідних змінних
in
та
out.
Потоки
подаються у вигляді ліній, що відображають
вид потоку і мають напрямок від та до
символу діаграми.
Функції
рішень
визначають темпи потоків, їх дія
еквівалентна дії вентилів у потоках.
Вони подаються в одній із еквівалентних
форм . У лівому верхньому куті символу
наводиться ідентифікатор змінної
ssr,
що визначає темп потоку, у правому
нижньому куті - номер рівняння, що
визначає значення змінної. Джерела
та кінцеві пункти
являють собою специфічні рівні, які
мають тільки вхід або тільки вихід .
Вони використовуються для регулювання
потоків, джерела яких знаходяться поза
об'єктом моделювання.
Точки
відбору інформації
позначаються у вигляді кружка і пунктирної
лінії інформаційного потоку. Вони
позначають місця отримання інформації
для встановлення зв'язку між змінними
і параметрами моделі. Відбір інформації
не виявляє ніякої дії на змінну, щодо
якої відбирається інформація.
Символи
допоміжних змінних
розташовуються в каналах потоків
інформації між рівнями і функціями
рішень, які регулюють темпи потоків.
Вони позначаються у вигляді кружків із
зазначенням у середині ідентифікатора
змінної та номера відповідного
рівняння.Параметри
(постійні)
позначаються як лінії потоків з точками
відбору інформації. Змінні
на інших діаграмах.
Діаграми потоків можуть розбиватися
на окремі частини. Для відображення
зв'язків початкових і кінцевих точок
окремих діаграм використовують спеціальні
символи.
За
необхідності тут можуть вказуватися
номера сторінок, на подаються зображення
відповідних частин діаграми. Запізнення,
що подаються показниковими ф-ми, можуть
бути представлены комбынацыэю рывныв
ы темпів потоків. Через те, що вони досить
часто зустрічаються на дыаграммах
потоків, для ъх позначення введено спец.
Символ: ,
де ssd
-
темп
потоку на вході; mtr
-
вміст
рівня;
6.
Системи рівнянь імітаційних моделей
динаміки
Для опису базової структури
імітаційних моделей динаміки необхідна
система рівнянь, що задовольняла б
перерахованим вище вимогам і дозволяла
б визначати поточні значення для рівнів
і темпів потоків. Така система рівнянь
повинна відповідати взаємодії елементів
об'єкта, а її розв'язки -
станам
об'єкта для визначених моментів часу.
Інтервал
моделювання розбивається на відрізки
рівної величини
dt.
При
цьому виділяються три послідовних
моменти часу:
j
-
попередній,
к
- теперішній;
l
-
майбутній.
Відрізки часу
dt
повинні бути достатньо малими, щоб темпи
потоків усередині них можна було вважати
постійними, отримавши достатнє наближення
до неперервних темпів потоків реального
об'єкта (рис. 6.2). Таким чином, на рішення,
прийняті на початку інтервалу, не будуть
впливати зміни, що матимуть місце на
цьому інтервалі.
Імітаційні
моделі динаміки (за Дж.Форрестером)
включають рівняння: рівнів; темпів
потоків; допоміжні; додаткові; початкових
умов. Для кожного з інтервалів спочатку
розв'язуються рівняння рівнів, а потім
отримані значення використовуються у
рівняннях темпів. Значення рівнів у
момент часу
к
обчислюються
на кінець інтервалу
jk,
а
по ним визначаються нові темпи потоків
(рішення) для наступного інтервалу
kl
(рис.
6.3).
Рівняння
рівнів визначають рівні у момент часу
к,
виходячи із значень рівнів у момент
j
і
темпів потоків на інтервалі
jk.
Отримані
значення рівнів будуть визначати темпи
потоків протягом наступного інтервалу
kl.
Постійність
темпів
у межах
dt
забезпечує
постійну швидкість зміни рівнів на
відрізку
jk.
Для
позначення змінних у рівняннях моделі
рекомендується використовувати символи,
що відображають фізичну суть показників
досліджуваного об'єкта. Відповідність
значень змінних моментам і відрізкам
часу встановлюється за допомогою
розширень їх ідентифікаторів:
.j;
.k;
. l;
.jk;
. kl
Рывень
Кусочно-лінійна
апроксимація змін рівня.
Рівняння
рівнів(U-рівняння).
Рівень являє собою змінний за величиною
вміст ємності.
Значення
рівнів визначається на початку і в кінці
кожного із інтервалів. Вважається, що
в серединіінтервалів значення рівня
змінюється лінійно. Прикладом типового
рівняння рівня може бути: zr.k
= zr.j
+ dt
* (in.jk
- out.jk),
zr.k,
zr.j
- значення рівня у моменти часу
к
і
j
відповідно; dt
-
крок моделювання;in.jk,
out.jk
-
відповідно темпи вхідного і вихідного
потоків на інтервалі
jk.
До
початку розв'язання рівняння рівня
значення всіх змінних і параметрів
повинні бути визначеними. Рівняння
рівнів є незалежними одне від одного і
можуть розв'язуватись у будь-якому
порядку.
Рівняння
темпів (Т-рівняння)
визначають темпи потоків між рівнями
у системі. Рівняння рівня розв'язуються
на основі даних щодо існуючих на поточний
час величинах рівнів (наприклад, від
якого і до якого направлений потік).
Т-рівняння
регулюють дії, які повинні відбутися
на наступному інтервалі часу. Прикладом
рівняння темпу може бути рівняння
запізнення вихідного потоку
out
на відрізку
kl,
що має вигляд показникової функції
першого порядку: out.kl
= zr.k
/ pz,
де zr.k
- значення рівня у момент часу
k;
pz
-
постійна запізнення. Рівняння темпів
розв'язуються після розв'язання рівнянь
рівнів у довільній послідовності
незалежно одне від одного. Допоміжні
рівняння (V-рівняння).
Якщо рівняння темпів виявляються
складними, то їх можна розбивати на
частини, які називають допоміжними
рівняннями.
V-рівняння
є проміжними. Вони розв'язуються на
момент часу
k
після
розв'язання [У-рівнянь, але до розв'язання
Т-рівнянь
та у строго визначеній послідовності.
Система
V-рівнянь
не повинна бути замкненою. Замкненість
системи
V-рівнянь
є показником її некоректності. Додаткові
рівняння (D-рівняння)
використовуються для отримання додаткової
інформації щодо об'єкта дослідження,
яка не передбачена постановкою задачі
моделювання. Такі рівняння можуть бути
корисними, наприклад, на етапі налагодження
моделі чи програми моделювання. По своїй
суті
D-рівняння
є рівняннями рівнів чи темпів. Рівняння
початкових умов (N-рівняння)
використовуються для визначення
початкових значень всіх рівнів і темпів,
які повинні бути відомими до першого
циклу розв'язання рівнянь. Вони також
використовуються для обчислення значень
одних постійних (параметрів) через
значення інших.
N-рівняння
розв'язуються
один раз перед глобальним циклом
моделювального алгоритму.
Довжина
інтервалу (кроку моделювання)
dt
вибирається на основі компромісу між
необхідною точністю розв'язку і часом
реалізації моделювального алгоритму:
-так
як рівні визначають темпи потоків, а
темпи визначають рівні, то інтервал
повинен бути достатньо коротким, щоб
зміни в рівнях між моментами розв'язання
рівнянь не приводили
до
неприпустимої дискретності темпів
потоків;
-інтервал
dt
повинен
бути достатньо коротким, щоб темпи
потоків не викликали великих змін рівнів
за один інтервал розв'язку;
-інтервал
dt
повинен
бути меншим 1/2
будь-якого
показникового запізнення першого
порядку, 1/4
запізнення
другого порядку, 1/6
запізнення
третього порядку і так далі;
інтервал
повинен бути суттєво меншим самого
короткого періоду коливань компонентів
досліджуваного об'єкта.
Правильність
вибору кроку
dt
перевіряється
шляхом його варіювання і оцінкою його
впливу на результати обчислень.
17.
Символи
в діаграмах потоків
Основни
елементи діаграм потоків є символи для
відображення: рівнів; потоків; функцій
рішень; джерел та кінцевих пунктів;
точок відбору інформації; допоміжних
змінних; параметрів; змінних на інших
діаграмах; запізнень.Рівні
подаються як прямокутники, у лівому
верхньому куті якого наводиться
ідентифікатор змінної
zr,
що характеризує рівень, у правому
нижньому куті - номер рівняння, що
визначає значення змінної рівня. Вхідний
і вихідний потоки рівня позначаються
направленими лініями з позначенням
ідентифікаторів відповідних змінних
in
та
out.
Потоки
подаються у вигляді ліній, що відображають
вид потоку і мають напрямок від та до
символу діаграми.
Функції
рішень
визначають темпи потоків, їх дія
еквівалентна дії вентилів у потоках.
Вони подаються в одній із еквівалентних
форм . У лівому верхньому куті символу
наводиться ідентифікатор змінної
ssr,
що визначає темп потоку, у правому
нижньому куті - номер рівняння, що
визначає значення змінної. Джерела
та кінцеві пункти
являють собою специфічні рівні, які
мають тільки вхід або тільки вихід .
Вони використовуються для регулювання
потоків, джерела яких знаходяться поза
об'єктом моделювання.
Точки
відбору інформації
позначаються у вигляді кружка і пунктирної
лінії інформаційного потоку. Вони
позначають місця отримання інформації
для встановлення зв'язку між змінними
і параметрами моделі. Відбір інформації
не виявляє ніякої дії на змінну, щодо
якої відбирається інформація.
Символи
допоміжних змінних
розташовуються в каналах потоків
інформації між рівнями і функціями
рішень, які регулюють темпи потоків.
Вони позначаються у вигляді кружків із
зазначенням у середині ідентифікатора
змінної та номера відповідного
рівняння.Параметри
(постійні)
позначаються як лінії потоків з точками
відбору інформації. Змінні
на інших діаграмах.
Діаграми потоків можуть розбиватися
на окремі частини. Для відображення
зв'язків початкових і кінцевих точок
окремих діаграм використовують спеціальні
символи.
За
необхідності тут можуть вказуватися
номера сторінок, на подаються зображення
відповідних частин діаграми. Запізнення,
що подаються показниковими ф-ми, можуть
бути представлены комбынацыэю рывныв
ы темпів потоків. Через те, що вони досить
часто зустрічаються на дыаграммах
потоків, для ъх позначення введено спец.
Символ: ,
де ssd
-
темп
потоку на вході; mtr
-
вміст
рівня;
1.5, u - номер рівняння для визначення значення вмісту рівня MTR; d3 - порядок запізнення (3-ій); tmp — темп потоку на виході; 1.1, t - номер рівняння для визначення темпу потоку на виході; pz — постійна часу запізнення.
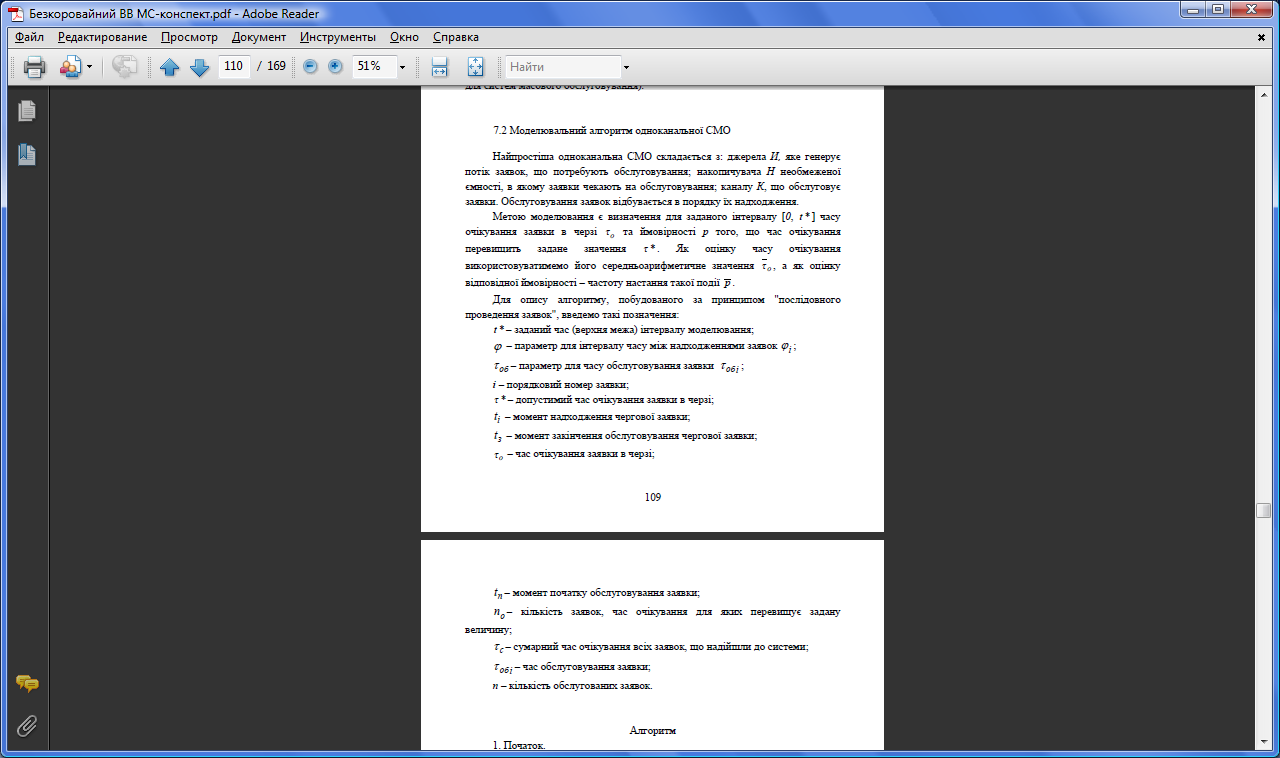
1![]() 8.
Показникові запізнення динамічних
моделей
Запізнення мають місце у
всіх каналах об'єктів. З метою спрощення
моделей:-невеликі за значенням запізнення
можна не враховувати в моделі; лінійні
ланцюжки запізнень можна, як правило,
можна подавати як одне загальне
запізнення; запізнення у паралельних
каналах, що об'єднуються в одному каналі,
як правило, можна подати одним запізнення
у загальному каналі. Запізнення являють
собою особливий вид рівня, в якому
вихідний потік визначається тільки
рівнем, що міститься у запізненні, а
також деякою постійною (постійною
запізнення)
pz.
Воно характеризується двома показниками:
середнім значенням запізнення
pz
та "неусталеною" реакцією, яка
відображає зв'язок між динамікою
вихідного потоку і вхідного потоку при
зміні останнього.Середнє значення
pz
визначає запізнення, при якому темпи
потоків на вході і виході, а також рівень,
що знаходиться у запізненні, будуть
постійними. В умовах, що встановилися,
рівень, який є у запізненні, дорівнює
значенню темпу вхідного потоку,
помноженому на постійну запізнення рz.
Запізнення
"неусталеної" реакції можна подавати
за допомогою функцій різних видів.
Показникове запізнення 1-го порядку
складається з рівня (що поглинає різницю
темпів вхідного і вихідного потоків) і
темпу вихідного потоку, що залежить від
величини рівня і середнього запізнення
(сталої). Модель показникового запізнення
1-го порядку зображується парою рівнянь,
що мають вигляд:
де
u
- рівень, що знаходиться у запізненні;dt
- крок моделювання;in
- темп вхідного потоку;out
- темп вихідного потоку; рz
- стала запізнення.
8.
Показникові запізнення динамічних
моделей
Запізнення мають місце у
всіх каналах об'єктів. З метою спрощення
моделей:-невеликі за значенням запізнення
можна не враховувати в моделі; лінійні
ланцюжки запізнень можна, як правило,
можна подавати як одне загальне
запізнення; запізнення у паралельних
каналах, що об'єднуються в одному каналі,
як правило, можна подати одним запізнення
у загальному каналі. Запізнення являють
собою особливий вид рівня, в якому
вихідний потік визначається тільки
рівнем, що міститься у запізненні, а
також деякою постійною (постійною
запізнення)
pz.
Воно характеризується двома показниками:
середнім значенням запізнення
pz
та "неусталеною" реакцією, яка
відображає зв'язок між динамікою
вихідного потоку і вхідного потоку при
зміні останнього.Середнє значення
pz
визначає запізнення, при якому темпи
потоків на вході і виході, а також рівень,
що знаходиться у запізненні, будуть
постійними. В умовах, що встановилися,
рівень, який є у запізненні, дорівнює
значенню темпу вхідного потоку,
помноженому на постійну запізнення рz.
Запізнення
"неусталеної" реакції можна подавати
за допомогою функцій різних видів.
Показникове запізнення 1-го порядку
складається з рівня (що поглинає різницю
темпів вхідного і вихідного потоків) і
темпу вихідного потоку, що залежить від
величини рівня і середнього запізнення
(сталої). Модель показникового запізнення
1-го порядку зображується парою рівнянь,
що мають вигляд:
де
u
- рівень, що знаходиться у запізненні;dt
- крок моделювання;in
- темп вхідного потоку;out
- темп вихідного потоку; рz
- стала запізнення.
П![]()
![]() оказникове
запізнення 2-го
порядку
складається з двох послідовно з'єднаних
запізнень 1-го
порядку.
Його модель може бути подана системою
рівнянь вигляду:
де
u1,
u2,
u3
- рівні, що знаходяться в запізненні; dt
- крок моделювання;
in,
f12,
f23,
out
- темпи вхідних і вихідних потоків ланок;
pz
- стала запізнення.
оказникове
запізнення 2-го
порядку
складається з двох послідовно з'єднаних
запізнень 1-го
порядку.
Його модель може бути подана системою
рівнянь вигляду:
де
u1,
u2,
u3
- рівні, що знаходяться в запізненні; dt
- крок моделювання;
in,
f12,
f23,
out
- темпи вхідних і вихідних потоків ланок;
pz
- стала запізнення.
 19.
Правила
і розв'язки в динамічних керованих
об'єктах
Управління,
по своїй суті, являє собою процес
перетворення інформації в дію. Основу
цього процесу складає прийняття рішень.
Прийняття рішень, у свою чергу, базується
на явних чи неявних правилах поведінки.
Успіх управління, перед усім, залежить
від того, яка інформація відібрана і як
виконано її перетворення. Динамічний
керований об'єкт може розглядатись як
комплекс, що зв'язаний мережею каналів
інформації. Канали беруть початок у
пунктах, де здійснюється контроль
реальних процесів. Кожному пункту
діяльності в об'єкті відповідає локальний
пункт прийняття рішень (рис. 6.16). Інформація
вводиться в пункт, де приймаються
рішення, які керують діями, що є джерелом
нової інформації.
Як
правило, керовані об'єкти складаються
з багатьох ланок і взаємопов'язаних
підсистем. Рішення в них приймаються в
багатьох пунктах, кожна дія у відповідь
породжує інформацію, яка може бути
використана у багатьох, але не у всіх
пунктах прийняття рішень (рис. 6.17).
Кожне
конкретне рішення у системі ґрунтується
на її стані, який може бути поданий
сукупністю різних рівнів двох видів:
одні з них відображають стан у теперішній
час, а інші -
бажаний
стан системи.
Аналогова
обчислювальна машина (АОМ) представляє
собою фізичну модель. Змінні та параметри
математичних моделей динаміки подаються
в АОМ у вигляді машинних змінних (миттєвих
значень напруги). АОМ складається з:
операційних (функціональних) блоків;
вимірювальної апаратури; апаратури
реєстрації; пристрою керування.
19.
Правила
і розв'язки в динамічних керованих
об'єктах
Управління,
по своїй суті, являє собою процес
перетворення інформації в дію. Основу
цього процесу складає прийняття рішень.
Прийняття рішень, у свою чергу, базується
на явних чи неявних правилах поведінки.
Успіх управління, перед усім, залежить
від того, яка інформація відібрана і як
виконано її перетворення. Динамічний
керований об'єкт може розглядатись як
комплекс, що зв'язаний мережею каналів
інформації. Канали беруть початок у
пунктах, де здійснюється контроль
реальних процесів. Кожному пункту
діяльності в об'єкті відповідає локальний
пункт прийняття рішень (рис. 6.16). Інформація
вводиться в пункт, де приймаються
рішення, які керують діями, що є джерелом
нової інформації.
Як
правило, керовані об'єкти складаються
з багатьох ланок і взаємопов'язаних
підсистем. Рішення в них приймаються в
багатьох пунктах, кожна дія у відповідь
породжує інформацію, яка може бути
використана у багатьох, але не у всіх
пунктах прийняття рішень (рис. 6.17).
Кожне
конкретне рішення у системі ґрунтується
на її стані, який може бути поданий
сукупністю різних рівнів двох видів:
одні з них відображають стан у теперішній
час, а інші -
бажаний
стан системи.
Аналогова
обчислювальна машина (АОМ) представляє
собою фізичну модель. Змінні та параметри
математичних моделей динаміки подаються
в АОМ у вигляді машинних змінних (миттєвих
значень напруги). АОМ складається з:
операційних (функціональних) блоків;
вимірювальної апаратури; апаратури
реєстрації; пристрою керування.
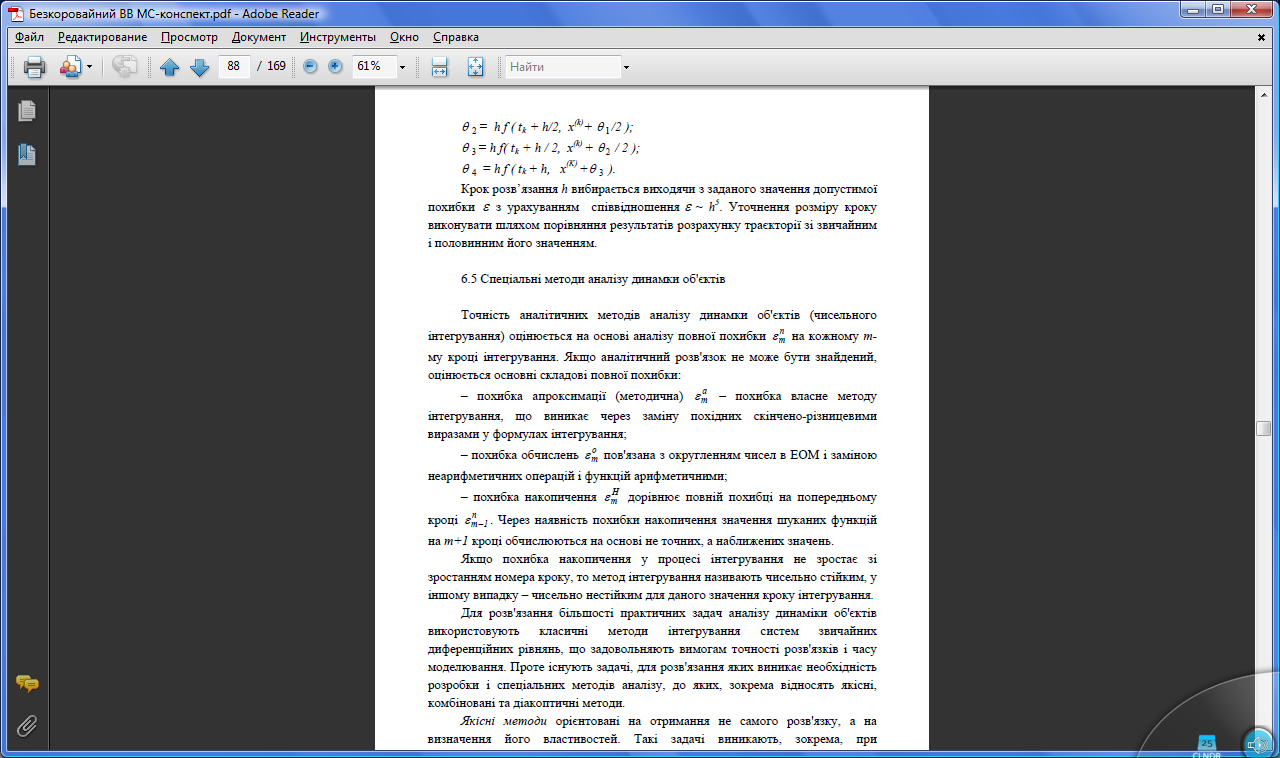
Основними етапами підготовки АОМ-моделювання є:постановка задачі дослідження (створення математичної моделі; визначення діапазонів значень параметрів і змінних);програмування задачі (перетворення моделі до вигляду, що є зручним для АОМ-реалізації; розробка структурної схеми АОМ);масштабування задачі (визначення співвідношення між значеннями параметрів і змінних математичної моделі та машинної моделі);комутація задачі (з'єднання операційних блоків та встановлення початкових значень змінних);контроль схеми і налагодження блоків (перевірка відповідності схеми математичній моделі та значень коефіцієнтів передачі блоків машинної моделі).Схема методу програмування АОМ для розв' язання звичайного диференційного рівняння «-порядку може бути подана в такий спосіб.1Розв'язати рівняння відносно старшої похідної.2Включити до структурної схеми ланцюжок із п інтеграторів.3Вважаючи що похідна старшого порядку є відомою, подати відповідний сигнал на вхід першого інтегратора. На виходах інтеграторів отримаємо шукану змінну та її п-1 похідні.4Із вихідних сигналів інтеграторів і функції збурення сформувати сигнал, рівний похідній вищого порядку.5Ланцюг замкнути шляхом подачі сформованого сигналу на вхід першого інтегратора.6Задати на інтеграторах значення змінних, що відповідають початковим умовам. 20. Подання об'єктів у вигляді Q-схем Характерними для процесів функціонування систем масового обслуговування (СМО) є поява заявок (вимог) на обслуговування та завершення обслуговування у випадкові моменти часу, тобто стохастичний характер процесу їх функціонування. У загальному випадку моменти надходження заявок у систему S із зовнішнього середовища Е утворюють вхідний потік, а моменти закінчення обслуговування утворюють вихідний потік обслужених заявок. Формалізуючи систему за допомогою Q-схеми, необхідно побудувати її структуру, використовуючи три основних типи елементів: И - джерела; Н - накопичувачі; К - канали обслуговування заявок. Крім зв'язків, що відображують рух заявок (суцільні лінії) на Q-схемах можуть відображатися керуючі зв'язки. Прикладом таких зв'язків є блокування обслуговуючих каналів (по входу і виходу). «Клапани» зображуються у вигляді трикутників, а керуючі зв'язки - пунктирними лініями. Блокування каналу щодо входу означає, що цей канал відключається від вхідного потоку заявок, а блокування каналу щодо виходу вказує, що заявка, яка вже обслужена блокованим каналом, залишається в цьому каналі до моменту зняття блокування (відкриття «клапану»). У цьому випадку, якщо перед накопичувачем немає «клапана», за умови його переповнення матимуть місце втрати заявок.
Крім вихідного потоку обслужених заявок Ns , у системах може бути потік втрачених заявок N1. g-схему можна вважати заданою, якщо визначені: потоки подій (вхідні потоки заявок і потоки обслуговування для кожного Н і К); структура системи S (кількість фаз, кількість каналів обслуговування, кількість і ємність накопичувачів на кожній з фаз обслуговування заявок і зв'язки між И, Н і К); алгоритми функціонування системи (дисципліни очікування заявок в Н і вибору на обслуговування в К, правила виходу заявок із Н і К).
Моделювальні алгоритми для дослідження СМО можуть бути побудовані як за часовим (A t), так і за подійним (8z) принципами. У загальному випадку більш економними для моделювання СМО є алгоритми, що побудовані за принципом 8z та "послідовного проведення заявок" (модифікація принципу 8z для систем масового обслуговування).
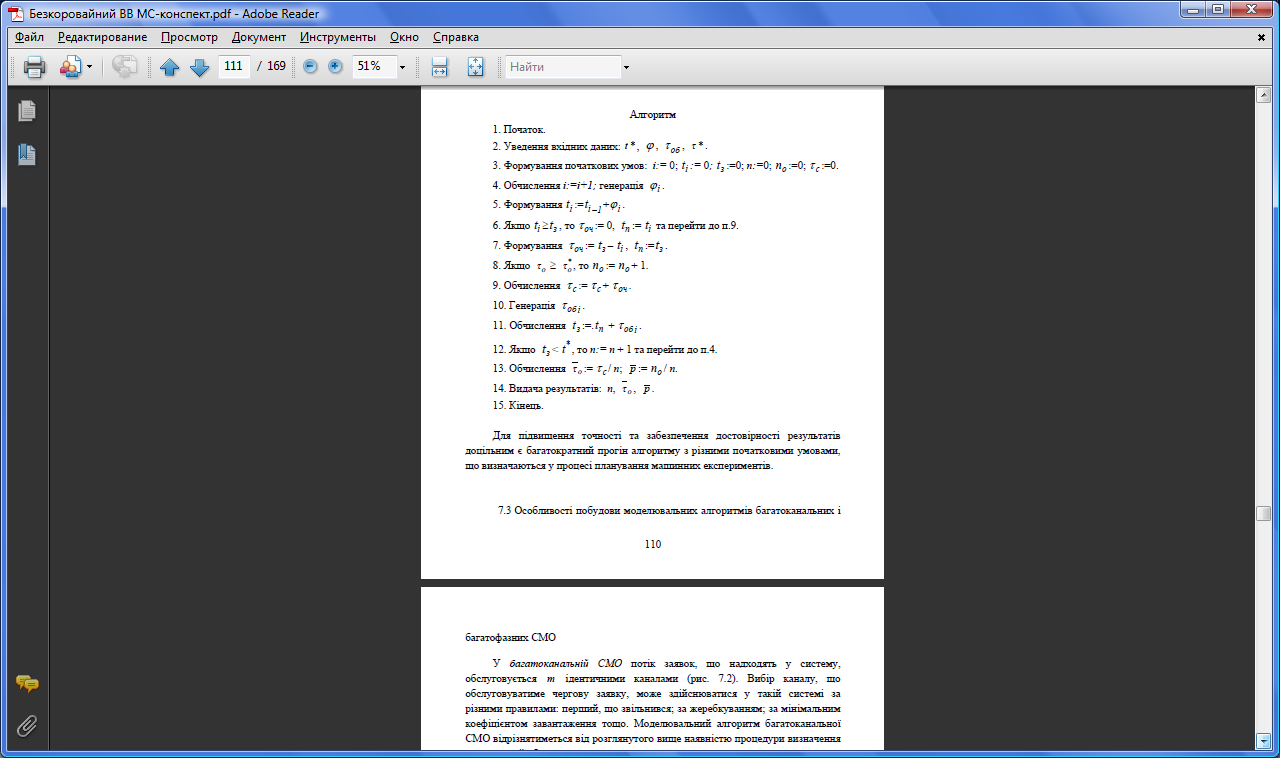
21.
Моделювальний алгоритм одноканальної
СМО
Найпростіша одноканальна СМО
складається з: джерела
И,
яке генерує потік заявок, що потребують
обслуговування; накопичувача
Н
необмеженої ємності, в якому заявки
чекають на обслуговування; каналу
К,
що обслуговує заявки. Обслуговування
заявок відбувається в порядку їх
надходження. Метою моделювання є
визначення для заданого інтервалу
[0,
t*
] часу очікування заявки в черзі
то
та ймовірності
p
того, що час очікування перевищить
задане значення
т *.
Як оцінку часу очікування використовуватимемо
його середньоарифметичне значення
т o,
а як оцінку відповідної ймовірності -
частоту настання такої події
p.
Для опису алгоритму, побудованого за
принципом "послідовного проведення
заявок", введемо такі позначення:
 21.
Особливості
побудови моделювальних алгоритмів
багатоканальних і багатофазних
СМО
У
багатоканальній СМО
потік
заявок,
що
надходять у систему, обслуговується
m
ідентичними
каналами (рис. 7.2).
Вибір
каналу, що обслуговуватиме чергову
заявку, може здійснюватися у такій
системі за різними правилами:
перший,
що звільнився; за жеребкуванням; за
мінімальним коефіцієнтом завантаження
тощо. Моделювальний алгоритм багатоканальної
СМО відрізнятиметься від розглянутого
вище наявністю процедури визначення
каналу, який обслуговуватиме чергову
заявку. Нехай
в системі, що моделюється, реалізується
правило вибору за мінімальним часом
звільнення каналу після обслуговування
попередньої заявки. Тоді в попередньому
алгоритмі потрібно додати такі деталі.
На кроці 3
21.
Особливості
побудови моделювальних алгоритмів
багатоканальних і багатофазних
СМО
У
багатоканальній СМО
потік
заявок,
що
надходять у систему, обслуговується
m
ідентичними
каналами (рис. 7.2).
Вибір
каналу, що обслуговуватиме чергову
заявку, може здійснюватися у такій
системі за різними правилами:
перший,
що звільнився; за жеребкуванням; за
мінімальним коефіцієнтом завантаження
тощо. Моделювальний алгоритм багатоканальної
СМО відрізнятиметься від розглянутого
вище наявністю процедури визначення
каналу, який обслуговуватиме чергову
заявку. Нехай
в системі, що моделюється, реалізується
правило вибору за мінімальним часом
звільнення каналу після обслуговування
попередньої заявки. Тоді в попередньому
алгоритмі потрібно додати такі деталі.
На кроці 3
(формування початкових умов) замість t3 :=0 вставити t\ := 0, k = 1,m, що відповідатиме нульовим початковим умовам (всі m каналів на початку моделювання вільні). На всіх кроках, де зустрічається t3, замість нього
k* k*
використовувати t3 , де t3 - час звільнення першого з каналів, що визначається шляхом розв'язання після пункту 5 задачі пошуку мінімального елемента масиву: k* = arg min t3k, де tk3 - час звільнення k -го каналу.
1< k < m
Моделювальні алгоритми багатофазних СМО, що будуються за блочним принципом, складаються з алгоритмів, що описують роботу окремих фаз (зокрема, окремих каналів).
При побудові моделювального алгоритму Q-схеми за "принципом A t" (з детермінованим кроком) для побудови адекватної моделі необхідно визначити мінімальний інтервал часу між сусідніми подіями тi: тmin = min {тi} (у вхідних
потоках і потоках обслуговування) і прийняти, що крок моделювання At <тmin.
У моделювальних алгоритмах, побудованих за "принципом 8z" (з випадковим кроком тi), стани елементів Q-схеми проглядаються тільки в особливі моменти часу. Такі алгоритми можуть бути побудовані за: синхронним або асинхронним; циклічним або ациклічним способами.
При синхрОннОму способі побудови алгоритму один з елементів Q-схеми (И, Н або К) вибирається за ведучий і по ньому "синхронізується" весь процес моделювання. При асинхронному способі ведучий (синхронізуючий) елемент не використовується, а черговому кроку моделювання (моменту перегляду елементів Q-схеми) може відповідати будь-який особливий стан із всієї множини елементів (И, Н, К). При цьому перегляд елементів Q-схеми в особливі моменти часу здійснюється циклічно (всі елементи) або спорадично (тільки ті, які можуть у цьому випадку змінити свій стан - перегляд із прогнозуванням).
При цьому необхідно мати на увазі, що поява однієї заявки вхідного потоку в деякий момент часу tn може викликати зміну стану не більш ніж одного з елементів Q-схеми, а закінчення обслуговування заявки в деякому каналі (К) у момент часу tn може призвести до послідовної зміни станів декількох елементів (Ні К). Тобто матиме місце процес поширення зміни станів у напрямку, протилежному руху заявок у Q-схемі (рис. 7.1).
З урахуванням цього моделювальні алгоритми багатофазних СМО можуть бути побудовані як з прямою (фаза 1, фаза 2 і т.д.), так і зі зворотною (фаза n, фаза n -1 і т.д.) послідовністю фаз (рис. 7.3).
Знаючи основні прийоми побудови моделювальних алгоритмів багатоканальних і багатофазних СМО, можна формувати алгоритми для систем будь-якої складності.